【无人机通信】基于粒子群和基于行为控制实现无人机最佳多跳网络部署附matlab代码... |
您所在的位置:网站首页 › 无人机编队技术如何实现 › 【无人机通信】基于粒子群和基于行为控制实现无人机最佳多跳网络部署附matlab代码... |
【无人机通信】基于粒子群和基于行为控制实现无人机最佳多跳网络部署附matlab代码...
|
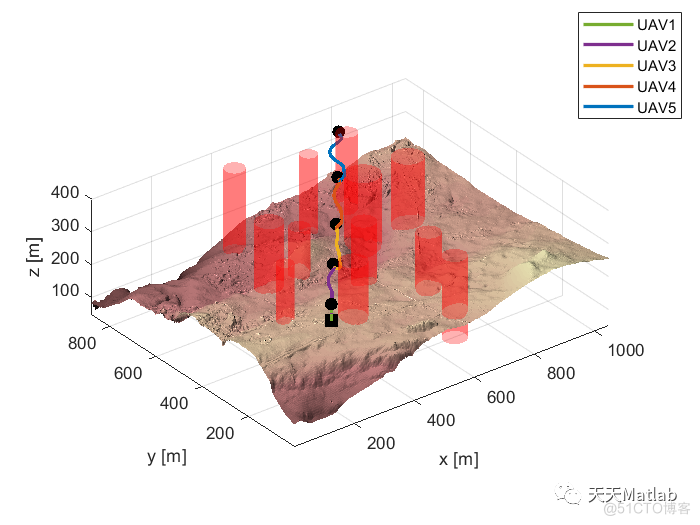
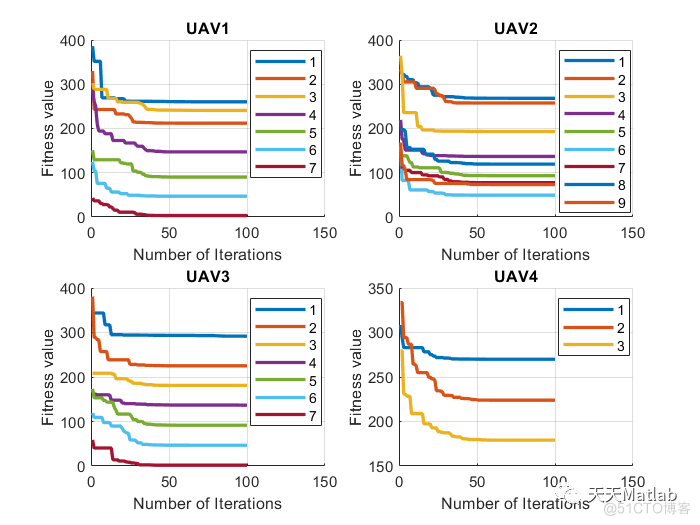
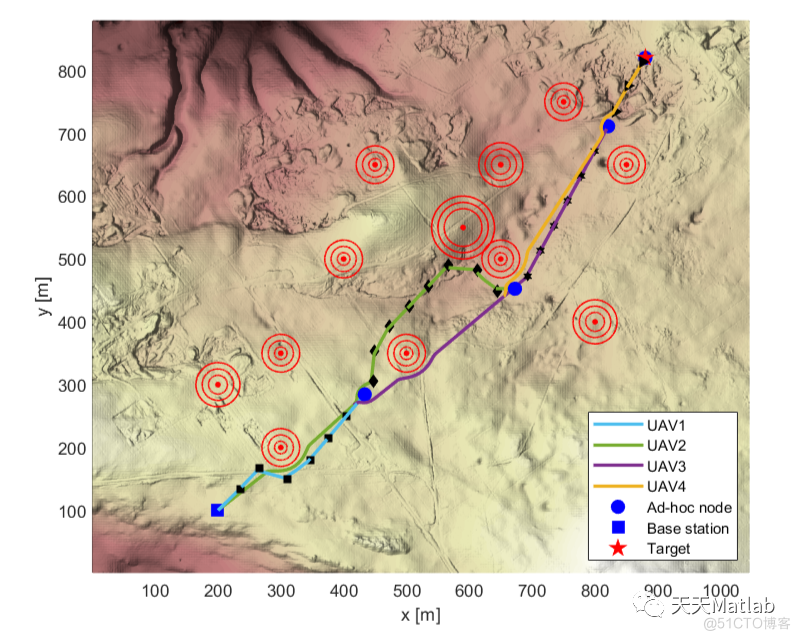
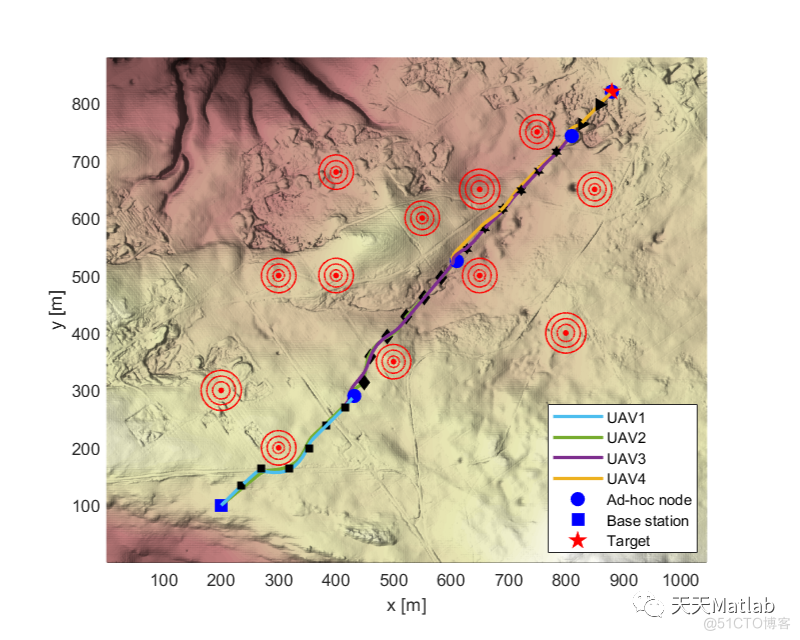
✅作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,matlab项目合作可私信。 🍎个人主页:Matlab科研工作室 🍊个人信条:格物致知。 ⛄ 内容介绍基于粒子群优化(Particle Swarm Optimization, PSO)和基于行为控制(Behavioral Control)的方法可以实现无人机最佳多跳网络部署。下面将介绍这两种方法的基本原理和步骤。 粒子群优化(PSO): 初始化种群:随机生成一组粒子,每个粒子代表一个无人机的位置。计算适应度:根据无人机的位置,计算网络性能指标(如覆盖范围、通信质量等)作为适应度值。更新速度和位置:根据每个粒子的当前位置和速度,以及个体经验和群体经验,更新速度和位置,以寻找更优的解。重复迭代:重复执行更新速度和位置的步骤,直到达到预定的迭代次数或满足停止条件。输出最优解:根据迭代过程中的适应度值,选择具有最佳适应度的粒子作为最优解,即最佳的无人机位置。 基于行为控制: 设定行为规则:定义无人机的行为规则,如避障、跟随、聚集等。感知环境信息:无人机通过传感器感知周围环境的信息,如障碍物位置、其他无人机位置等。更新行为:根据感知到的环境信息和设定的行为规则,更新无人机的行为,如调整飞行速度、方向等。重复迭代:不断重复感知环境信息和更新行为的过程,直到达到预定的终止条件。输出最佳部署:根据迭代过程中的行为更新,确定无人机的最佳部署位置,以实现最优的多跳网络部署。在实际应用中,可以将PSO和基于行为控制方法结合起来,以综合考虑无人机的位置优化和行为控制。通过适当调整PSO算法中的参数,如粒子数、迭代次数等,以及设定合适的行为规则,可以实现无人机的最佳多跳网络部署,并提高网络性能和通信质量。 本研究提出了一种利用多无人机在灾区提供紧急通信的多跳特设网络的建立方法。该方法包括两个阶段,一个阶段使用粒子群优化(PSO)来找到部署无人机的最佳位置,另一个阶段使用基于行为的控制器来引导无人机到达指定的位置,而不与未知环境中的障碍发生碰撞。为确保拟议的方法适用于实际情况,对无人机的遥感和通信范围施加了若干限制。对实际环境中的数据进行了大量模拟实验.结果表明,我们提出的方法不仅在建立多跳临时线路方面取得了成功,而且满足了无人机实时部署的要求。 ⛄ 部分代码 function model=CreateModel3() H = imread('ChrismasTerrain.tif'); % Get elevation data H (H < 0) = 0; MAPSIZE_X = size(H,2); % x index: columns of H MAPSIZE_Y = size(H,1); % y index: rows of H [X,Y] = meshgrid(1:MAPSIZE_X,1:MAPSIZE_Y); % Create all (x,y) points to plot % Map limits xmin= 1; xmax= MAPSIZE_X; ymin= 1; ymax= MAPSIZE_Y; zmin = 100; zmax = 200; % Threats as cylinders R1=30; % Radius x1 = 400; y1 = 500; z1 = 100; % center R2=35; % Radius x2 = 600; y2 = 200; z2 = 150; % center R3=35; % Radius x3 = 500; y3 = 350; z3 = 150; % center R4=40; % Radius x4 = 350; y4 = 200; z4 = 150; % center R5=45; % Radius x5 = 800; y5 = 550; z5 = 150; % center R6=30; % Radius x6 = 750; y6 = 750; z6 = 150; % center R7=25; % Radius x7 = 200; y7 = 300; z7 = 150; % center R8=40; % Radius x8 = 300; y8 = 500; z8 = 150; % center R9=50; % Radius x9 = 650; y9 = 550; z9 = 150; % center R10=25; % Radius x10 = 600; y10 = 720; z10 = 150; % center R11=30; % Radius x11 = 400; y11 = 780; z11 = 150; % center R12=35; % Radius x12 = 580; y12 = 60; z12 = 150; % center % Start and end position start = [200,100,100]; start(3) = start(3) + H(round(start(2)),round(start(1))); % goals = [[700,200,150]; % [900,500,150]; % [800,800,150]; % [500,700,150]]; % % for i = 1:size(goals,1) % goals(i,3) = goals(i,3) + H(round(goals(i,2)),round(goals(i,1))); % end goal = [800,850,150]; goal(3) = goal(3) + H(round(goal(2)),round(goal(1))); % Incorporate map and searching parameters to a model model.start = start; model.goal = goal; model.xmin=xmin; model.xmax=xmax; model.ymin=ymin; model.ymax=ymax; model.zmin=zmin; model.zmax=zmax; model.MAPSIZE_X = MAPSIZE_X; model.MAPSIZE_Y = MAPSIZE_Y; model.X = X; model.Y = Y; model.H = H; model.threats = [x1 y1 z1 R1;x2 y2 z2 R2; x3 y3 z3 R3; x4 y4 z4 R4; ... x5 y5 z5 R5;x6 y6 z6 R6; x7 y7 z7 R7; x8 y8 z8 R8; x9 y9 z9 R9; ... x10 y10 z10 R10; x11 y11 z11 R11; x12 y12 z12 R12]; end ⛄ 运行结果
|
【本文地址】
今日新闻 |
推荐新闻 |