ESP32四轴飞控硬件设计 |
您所在的位置:网站首页 › 无人机单片机原理图 › ESP32四轴飞控硬件设计 |
ESP32四轴飞控硬件设计
|
一. 前言
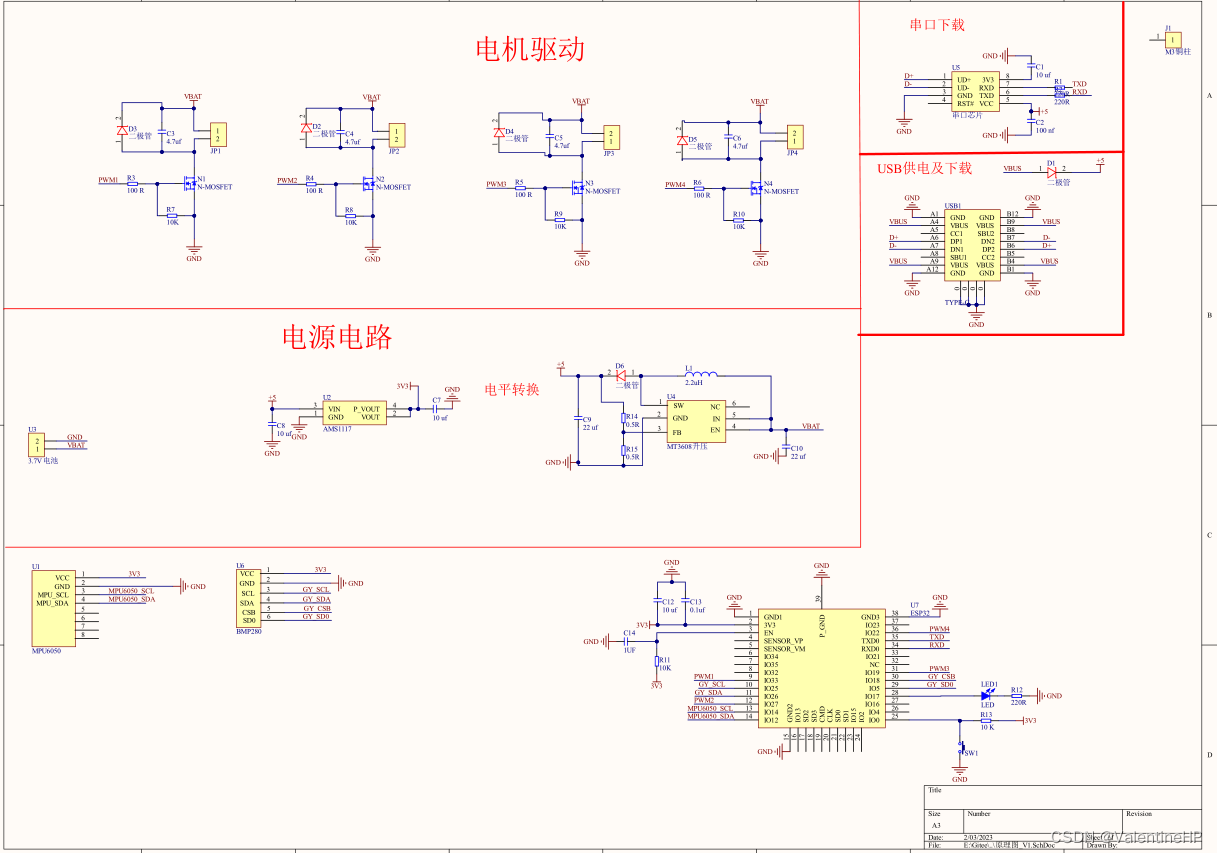
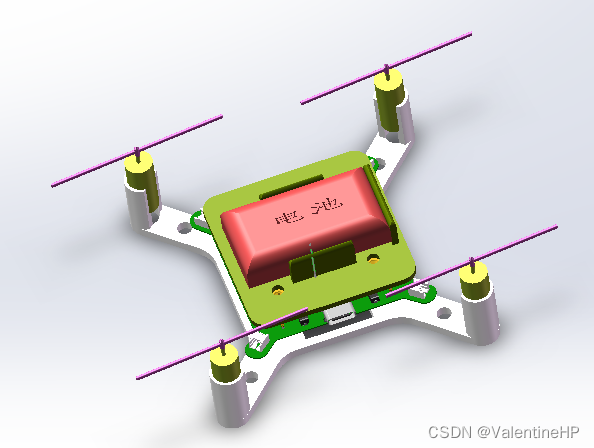
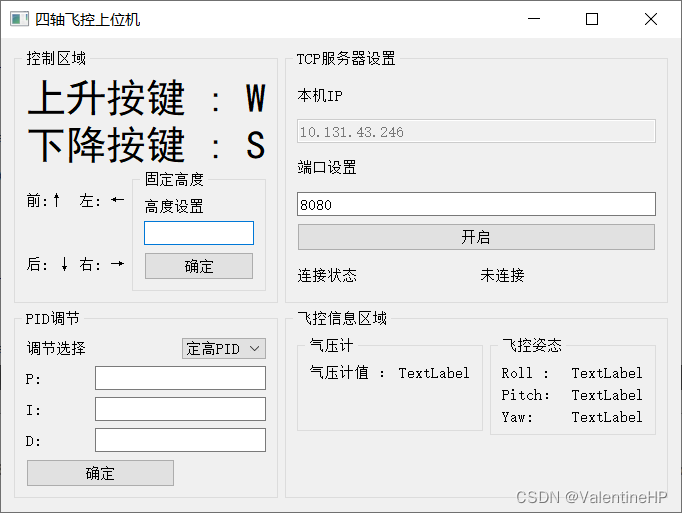
目前许多入门级开源飞控都是基于STM32系列的,基于此系列的有非常严重的短板,例如说通信方面,需要外置通信模块。 ESP32本身带有WIFI和蓝牙,在通信方面有着一定的优势,更加简化设计以及硬件成本。 文末有完整资料 二. PCB原理图设计原理图主要包括以下几个部分 1. 电机驱动电路 2. 串口下载电路 3. 5V升压和3.3V稳压电路 4. MPU6050和BMP280模块 5. ESP32最小系统其中升压芯片的选择需要注意一下,ESP32在使用WIFI或者蓝牙的时候,对电流的需求比较大,官方推荐的是500ma。所以升压芯片的输出电流需要较大,这里使用的是MT3608,最大输出电流可达2A,这点需要特注意一下,不然就会有意想不到的坑等着你。 使用SolidWorks软件进行设计,最终成品的效果图如下,电池大小为800mah,整体上还不错。 为了不使用遥控器硬件,所以我采用TCP 上位机的发生对ESP32飞控进行控制以及调试。 上位机采用QT编写,初步模型如下所示。 看到了这里,不如点下关注公众号,回复 ESP32四轴飞控硬件设计 获取链接吧!!! |
 后续软件设计会持续更新。
后续软件设计会持续更新。【本文地址】
今日新闻 |
推荐新闻 |