四旋翼无人机的结构与PID控制外文翻译资料 |
您所在的位置:网站首页 › 旋翼无人机英文 › 四旋翼无人机的结构与PID控制外文翻译资料 |
四旋翼无人机的结构与PID控制外文翻译资料
|
英语原文共 5 页,剩余内容已隐藏,支付完成后下载完整资料
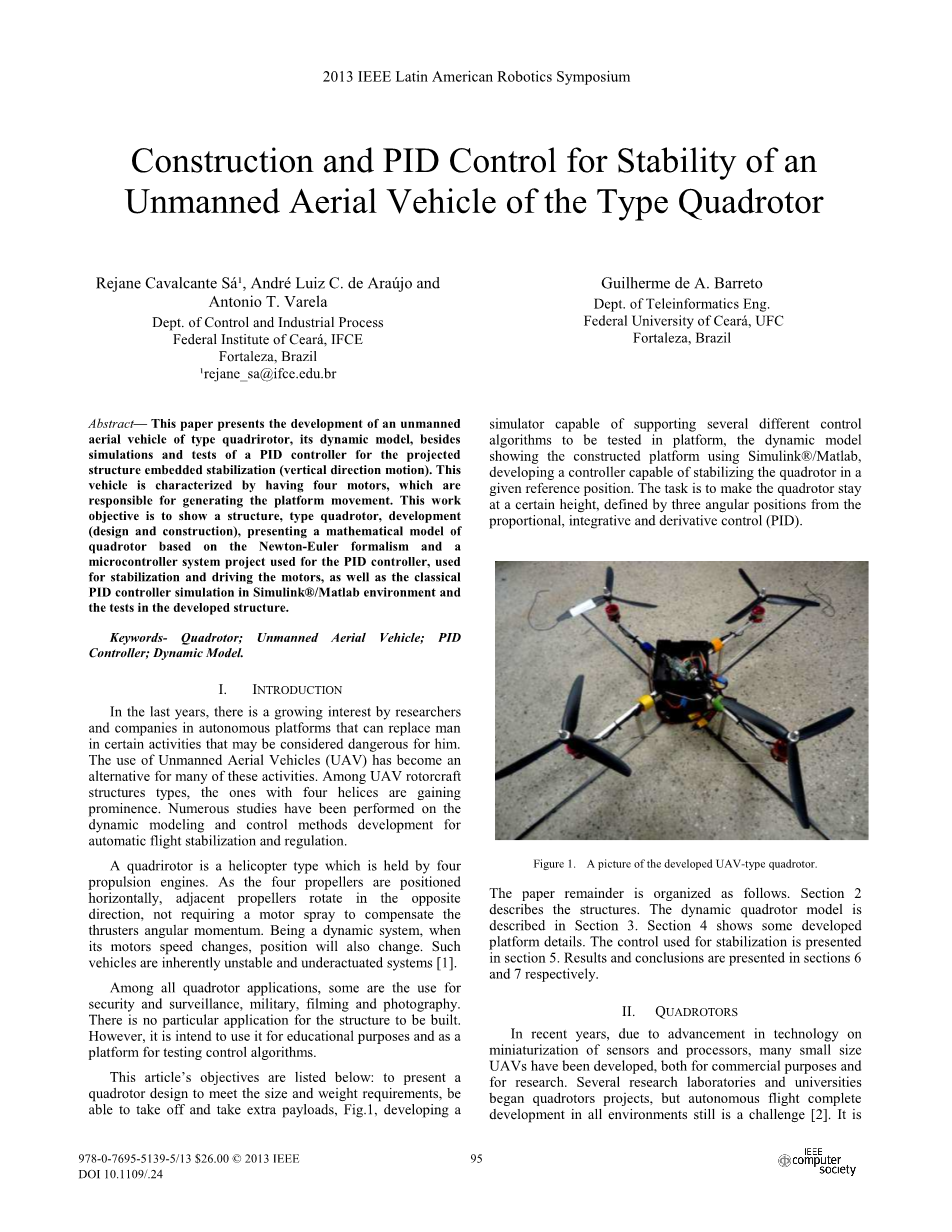
四旋翼无人机的结构与PID控制 摘要— 本文介绍了一种四旋翼无人机的研制及其动力学模型,并对一种用于投射结构嵌入稳定(垂直方向运动)的PID控制器进行了仿真和试验。这种车辆的特点是有四个马达,负责产生平台运动。本文的工作目标是给出四旋翼的结构、类型、发展(设计和构造),提出了一种基于牛顿-欧拉公式的四旋翼数学模型和一种用于PID控制器的单片机系统方案,用于电机的稳定和驱动,以及经典的PID控制器仿真在Simulink?/Matlab环境下对所开发的结构进行了测试。 关键词- 无人机;PID控制器;动态模型。 研究背景在过去的几年里,研究人员和公司对自主平台越来越感兴趣,这种平台可以在某些可能对人类有害的活动中取代人类。使用无人机(UAV)已经成为许多此类活动的替代品。在无人机旋翼机结构类型中,具有四个螺旋的旋翼机结构类型日益突出。针对自动飞行稳定与调节的动态建模与控制方法的发展,已经进行了大量的研究。 四旋翼机是一种由四个推进引擎支撑的直升机。由于四个螺旋桨水平放置,相邻的螺旋桨以相反的方向旋转,不需要马达喷雾来补偿推进器的角动量。作为一个动态系统,当电机转速发生变化时,位置也会发生变化。此类车辆本质上是不稳定和欠驱动系统[1]。 在所有四旋翼应用中,有些是用于安全和监视、军事、拍摄和摄影。对于要构建的结构,没有特定的应用程序。然而,它打算将其用于教育目的,并作为测试控制算法的平台。 本文的目标如下:提出满足尺寸和重量要求的四旋翼设计,能够起飞和承受额外的有效载荷,图1,开发一个能够支持多种不同控制算法在平台上测试的模拟器,使用Simulink?/Matlab建立了动态模型,显示了所构建的平台,开发了一个能够在给定参考位置稳定四旋翼的控制器。其任务是使四旋翼保持一定的高度,由比例、积分和微分控制(PID)的三个角位置确定)。 图1 研制的无人机四旋翼机的图片。 论文剩余部分的结构如下。第2节描述了这些结构。第3节描述了动态四旋翼模型。第4节显示了一些开发平台的详细信息。用于稳定的控制见第5节。结果和结论分别见第6和第7节。 四旋翼近年来,由于传感器和处理器小型化技术的进步,许多小型无人机被开发出来,无论是用于商业用途还是用于研究。一些研究实验室和大学开始了四旋翼机项目,但在所有环境下自主飞行的完整开发仍然是一个挑战[2]。每个研究小组开发自己的设备是惯例。 AR.Drone [3]和Draganflyer RC Toys[4]是一些最著名的商业销售。X4 Flyer[5]、STARMARC[6]、OS4[1]是世界上最流行的用于研究的工具,并且有几种类型的控件在平台上进行了测试。 在巴西,有几个研究小组对四旋翼机进行研究。埃斯皮里托-桑托联邦大学(Federal University of Espiacute;rito Santo)的论文仅限于设计、硬件和固件结构,该结构允许实施一些控制技术[7],另一个四旋翼机是由北里奥格兰德多联邦大学(Federal University of Rio Grande do Norte)和桑塔纳州立大学(State University of Feira de Santana)合作开发的,平台将是用于监测石油设施、配电系统和电力传输[8]等平台。 四旋翼动力学模型由于有四个旋翼,四旋翼操作是可能的。这些旋翼由四个电机和两对螺旋桨组成,一对用于单向转动,另一对用于反向转动。因此,两个旋翼顺时针旋转,另两个逆时针旋转。电动机的正确布置消除了它们产生的转矩效应。然后,相邻的螺旋线应该以相反的方向旋转,如布列盖特兄弟在1907年所使用的[9]。因此,当马达处于相同的角速度时,发动机扭矩消除了导致平台在给定位置保持平衡的另一个影响。 在图2中示出了可能的运动,其箭头宽度与旋翼速度成比例。马达1和3逆时针旋转,马达2和4顺时针旋转。设置电机2和4的速度,通过相对于电机1的速度增加电机3的速度,移动四旋翼货物,如图2(a)所示。当马达3的转速大于发动机1的转速时,则相反,图2(b)。 图2 螺旋桨旋转示意图(黑色箭头)和四旋翼运动示意图(红色箭头)。 当马达1和3的速度保持不变,马达2相对于马达4的速度变化时,就会发生左右移动,如图2(c)和(d)。 在同一轴上设置两个电机的速度,并增加或减少其他电机的速度,使四旋翼向前或向后移动图2(a)和(b)。当马达1和3的速度保持不变,马达2相对于马达4的速度变化时,就会发生左右移动,如图2(c)和(d)。 A. Newton-Euler model 本文中用来表示四旋翼行为的模型包括使用力和力矩的刚体动力学模型[5][10]。 图3具有用于描述运动方程的坐标系图示。考虑到E坐标系固定在地面,B坐标系固定在四旋翼中心。 图3 坐标系。 所建立的方程假定四旋翼结构和螺旋桨是刚性的,重心在结构中心,结构是对称的,发动机是相同的,气动升力和阻力与发动机转速的平方成正比。 欧拉角方向为高度控制和位置系统提供力和力矩[11]。刚体的Euler-Newton方程描述了由[12]给出的旋转和平移组合: (1) 其中m是系统总质量,是四旋翼惯性矩阵,还有分别为直线和角刚体速度和x的叉积。螺旋桨产生的力矢量由F=[fx fy fz]T和转矩矢量tau;=[tau;x tau;y tau;z]T。沿轴施加的转矩tau;x, tau;y tau;z可描述为每个轴上每个电机产生转矩之间的差异。 (2) 其中,l是四旋翼中心和螺旋桨中心之间的距离,d是阻力系数,b是推力系数,i=1,hellip;,4代表第i个螺旋桨角速度。矩阵R在倾斜角度的E坐标系中投影B坐标系矢量。该矩阵定义为: (3) 其中C和S分别代表余弦和正弦函数。 因此,使用矩阵R和牛顿第二定律,建立了四旋翼机的俯仰或侧倾旋转动力学模型: (4) (5) (6) (7) (8) (9) 其中是旋翼惯性,分别为横摇、俯仰和偏航角,Ixx、Iyy和Izz轴为x、y和z惯性矩。系统输入显示在U1、U2、U3和U4中,分别表示高度、横摇、俯仰和偏航的输入控制,如下式所示:: (10) (11) (12) (13) 开发平台使用的结构设计和组件是根据其他平台的成功经验确定的,如[7];[13];[14];[15];[16];[17]中所述,除了第二节中已经介绍的平台。本文开发的设计和结构组件如下所述。 我们选择了“U”形铝型材作为主要结构基础,通常用作门框和一些玻璃角。铝型材呈十字形排列,边缘用钢丝绳连接,以防止出现问题,从而提高刚度,从而避免使用更多铝型材,最终会使结构更重[18]。 推进系统由EMAX制造商CF2822型的四个发动机无刷直流电(BLDC)和GWS制造商HD-9050x3型的三个叶片的螺旋桨组成,顺时针方向两个,逆时针方向两个(具有反向攻角)。30A中的Hobby King为每台电机配备了电子速度控制(ESCs)电路。 负责将指令传递给四旋翼电机的电路是使用dsPIC30F4011微控制器、微芯片家族开发的。 这些命令由计算机通过无线电频率发送到与结构中的微控制器相连的另一台无线电。它处理传入的数据并向马达esc发送命令。发送的指令是高度和飞行方向。这台收音机是简易收音机ER400TRS。系统运行图如图4所示。 图4 主要部件的基本图,包括开发的四旋翼式无人机。 稳定控制模拟器从初始条件子块开始,块用于控制所需位置,随后在动态发动机块中估计螺旋桨速度。估计的旋翼速度为块气动动力系统提供动力,该系统产生每个螺旋桨的力和力矩。与动态系统块一起检测新状态。螺旋桨速度、加速度和结构图可以在图5中所示的相应绿色块中查看。 图5。在Matlab Simulink中开发的模拟器框图。 最初,为了稳定四旋翼角度,我们选择对每个角度使用单独的控制器PID。误差是期望角度和估计角度之间的差。图6示出了表示分析误差信号的每个角度的闭环控制的方案。 图6 角度控制方案 控制器输入端的连续误差信号被采集并转换成数字信号,而控制器输出端则被转换成模拟信号,为连续过程供电。控制器输入是计算机发送的位置和传感器测量的值。控制器输出包含角度调整值和高度值,这些值转换为每个电机的脉冲宽度调制PWM信号。利用固定在结构中的传感器惯性矩读数估计四旋翼位置。 具有比例、积分和微分(PID)作用的控制器是涵盖这三种控制模式的控制器。在连续时间域中,输入输出PID控制器与第k个角k=1、2和3的关系由下式给出: (14) 采用极点转移函数分析法,由闭环系统手动选择各位置的三个控制器参数(共九个)。 在(10)到(13)中,它可以写成一个线性系统,如下所示: (15) 在输出线性化的情况下,根据电机的角速度可以对这种结构应用经典控制。[19]、[20]和[21]等研究人员使用这种控制类型的策略,根据他们构建的结构调整参数。虽然各研究组都建立了各自的结构,但在实际结构的仿真和试验验证中,PID控制均取得了良好的稳定效果。 实验结果试验在室内进行,从施工开始。四旋翼作为一个整体是设计方法的结果,满足尺寸和重量要求。 对不同误差值下的控制器效率进行了仿真,以不同的方式改变结构的行为,从而检查控制器稳定车辆所需的时间。它知道被测角度和期望角度之间的差异是0弧度图7。 图7 系统响应采用经典PID控制器稳定,初始横摇角误差为0.5rad,俯仰角为-0.2和偏航角为0.2,在系统输出时加入噪声,采用低通滤波器。坐标系。 采用离散PID控制方程实现了稳定控制器。为了最小化传感器噪声,我们使用了移动平均滤波器,使用加速度计和陀螺仪(分别为MMA7361L和LPR510AL)检查平台的角度位置。图8示出了在嵌入式控制器上呈现的一些结果。 图8 平台角度稳定采用嵌入式单片机PID控制。 结论及后续工作可以验证所提出的控制器效率,以稳定所开发的平台。然而,它仍然需要改进传感器读数,因为真正的平台传感器的选择和它是如何做到的,读数变得相当嘈杂。 随着未来工作的提出,对传感器进行改进,验证PID控制器的变化,并对其他控制器进行测试。因此,所开发的四旋翼系统可以用来实现和测试各种控制算法。 感谢这项工作得到了FUNCAP(Fundaccedil;o Cearense de Apio ao Desenvolvimento Cientiacute;fico e Tecnoloacute;gico)的支持,并得到了CENTAURO(自动化和机器人参考中心)和LIT(技术创新实验室)的支持。 参考文献 S. Bouabdallah, “Desing and control of quadrotors with application to autonomous flying”. PhD Thesis, Eacute;chole Polytechnique Fedeacute;rale de Lausanne, 2007. M. B. SC. Wierema, “Design, implementation and flight test of indoor navigation and control system for a quadrotor UAV”, Delft University of Technology, Holanda, 2008. Parrot, “Technical Specifications Ar-Drone”, Available in: http://ardrone2.parrot.com/ar-drone-2/specifications/, 2012. Dragonflyer X4 helicopter, “Techn剩余内容已隐藏,支付完成后下载完整资料 资料编号:[254229],资料为PDF文档或Word文档,PDF文档可免费转换为Word 原文和译文剩余内容已隐藏,您需要先支付 30元 才能查看原文和译文全部内容!立即支付以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。 PREVIOUS NEXT 您可能感兴趣的文章 看边界:边界感知面部对齐算外文翻译资料 看边界:边界感知面部对齐算外文翻译资料 一种支持分布式正态智能监控的多代理体系结构外文翻译资料 增强的无线局域网协作MAC外文翻译资料 近眼显示器的绝对辐射和光度测量外文翻译资料 红外遥控系统外文翻译资料 一幅单一图像中雨滴去除的专注生成对抗性网络外文翻译资料 深度残差学习在图像识别中的应用外文翻译资料 低成本,便携式室内环境质量监测装置的设计与开发外文翻译资料 使用基于查询蓝牙的RSSI概率分布进行室内定位外文翻译资料 |

【本文地址】