FANUC机器人程序实例:走轨迹 |
您所在的位置:网站首页 › 方形机器人图怎么画 › FANUC机器人程序实例:走轨迹 |
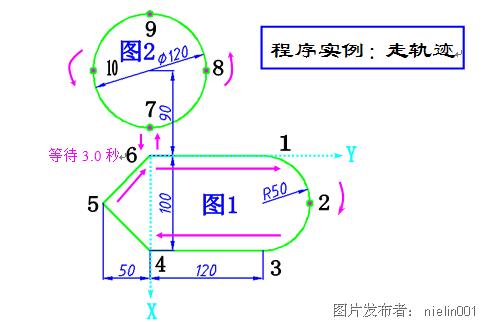
FANUC机器人程序实例:走轨迹
|
6→1、3→4、4→5、5→6、6→7、7→6 为直线运动; 先画图1,循环3次,等待3秒,再画图2,轨迹如上图所示。 10个位置在 同一平面。 程序(位置寄存器法:建立坐标系,指定位置具体坐标): 程序行 指令 注释 1 PR[6]=LPOS 以位置6为原点 2 PR[1]=PR[6] 将位置6赋值给位置1 3 PR[1,2]=PR[6,2]+120 位置1:以位置6为基准,其Y方向+120 4 PR[2]=PR[1] 将位置1赋值给位置2 5 PR[2,1]=PR[1,1]+50 位置2:以位置6为基准,其Y方向+50 6 PR[2,2]=PR[1,2]+50 位置2:以位置6为基准,其X方向+50 7 PR[3]=PR[1] 将位置1赋值给位置3 8 PR[3,1]=PR[1,1]+100 位置3:以位置1为基准,其X方向+100 9 PR[4]=PR[3] 将位置3赋值给位置4 10 PR[4,2]=PR[3,2]-120 位置4:以位置3为基准,其Y方向-120 11 PR[5]=PR[2] 将位置2赋值给位置5 12 PR[5,2]=PR[2,2]-220 位置5:以位置2为基准,其Y方向-220 13 PR[6]=PR[1] 将位置1赋值给位置6 14 PR[6,2]=PR[1,2]-120 位置6:以位置1为基准,其Y方向-120 15 R[1]=0 程序1初始值为0 16 LBL[1] 程序1分支标签 17 L PR[6] 2000mm/sec FINE 从其它位置以2000 mm/sec直线运动到位置6 18 L PR[1] 2000mm/sec FINE 从位置6以2000 mm/sec直线运动到位置1 19 C PR[2] 从位置1,经过位置2以2000mm/sec PR[3]2000mm/sec FINE 圆弧运动到位置3 20 L PR[4] 2000mm/sec FINE 从位置3以2000 mm/sec直线运动到位置4 21 L PR[5] 2000mm/sec FINE 从位置4以2000 mm/sec直线运动到位置5 22 L PR[6] 2000mm/sec FINE 从位置5以2000 mm/sec直线运动到位置6 23 R[1]= R[1]+1 每循环一次,R[1]值加1 24 IF R[1] |
【本文地址】