雷达测角原理、测角精度、测角分辨率以及3DFFT角度估计算法汇总 |
您所在的位置:网站首页 › 方位角法 › 雷达测角原理、测角精度、测角分辨率以及3DFFT角度估计算法汇总 |
雷达测角原理、测角精度、测角分辨率以及3DFFT角度估计算法汇总
|
1.角度测量方法
依据:电磁波的直线传播和雷达天线的方向性。 分类:振幅法测角、相位法测角 1.1 相位法测角相位法测角利用多个天线所接收回波信号之间的相位差进行测角。如下图所示; 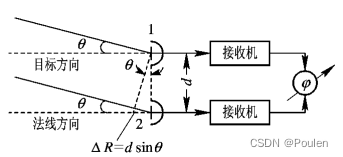 图 1
图 1
设在θ方向有一远区目标,则到达接收点的目标所反射的电磁波近视为平面波。由于两天线间距为d,故它们所收到的信号存在波程差∆𝑅,而产生一相位差,由图可知:
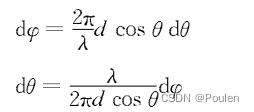
其中λ为雷达波长。如用相位计进行比相,测出其相位差为φ,就可以确定目标方向θ0。 1.1.1 测角误差(精度)与多值性问题相位差φ值测量不准,将产生测角误差,它们之间的关系如下(对上式相位差两边取微分):
式中可以看出,采用读数精度高的相位计,或减小𝜆/𝑑的值(增大𝑑/𝜆值),均可以提高测角精度。也注意到:当θ=0时,即目标处在天线法线方向时,测角误差dθ最小。当θ增大,dθ也增大,为保证一定的测角精度,θ的范围有一定的限制。 增大d/λ虽然可提高测角精度,但根据式(1)可知,在感兴趣的θ范围(测角范围)内,当d/λ加大到一定程度时,φ值可能超过2π,此时φ=2𝜋𝑁+𝜓,其中N为整数;ψ𝜋时,就会产生角度模糊,如下图所示:  图 8
图 8
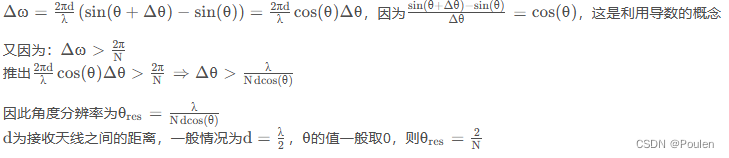
因此要求:
角度分辨率(Θ𝑟𝑒𝑠)是两个物体在ange-FFT中作为单独峰值出现的最小角度的问题 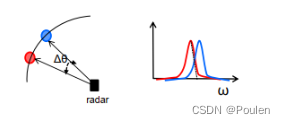 图 9
图 9
总结:3DFFT在FMCW雷达中,原理就是利用不同通道间(即不同接收天线)的波程差通过在天线方向进行FFT求得其角度,即相位法测角。 4.2 阵列信号处理相关DOA估计 1.Capon 2.Music 3.Esprit(借助旋转不变性的信号参数估计技术)未完待续。 5.总结有关阵列信号处理DOA估计内容,可以观看本人DOA估计算法专栏,本人会不定期更新。另外,创作不易,望各位多多支持。 参考资料: 雷达原理(丁鹭飞版) |


【本文地址】
今日新闻 |
推荐新闻 |