【控制专栏】 |
您所在的位置:网站首页 › 描述电路图的基本概念 › 【控制专栏】 |
【控制专栏】
|
1.什么是PID?
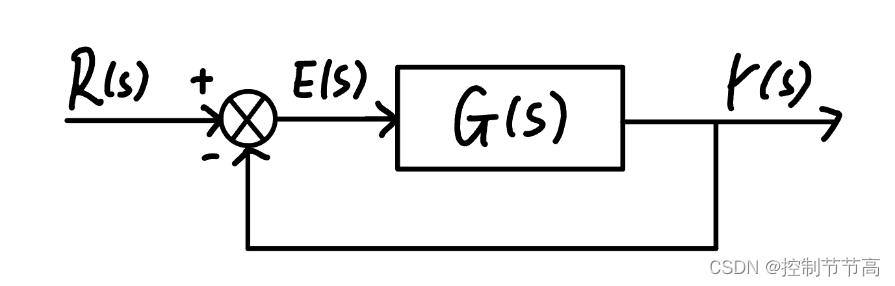
PID由P(proportional)比例、I(integral)积分、D(derivative)微分三部分组成,是一种基本的控制规律/算法(控制器),同时可以根据不同的需要构成比例P控制器、比例-积分PI控制器、比例-微分PD控制器等。它被广泛应用于各类控制系统的调节与校正中,并且能够实现大多数的系统稳态、动态性能需求。 在不加入控制器前,系统的控制框图为(懒得用软件画了,手画代替):
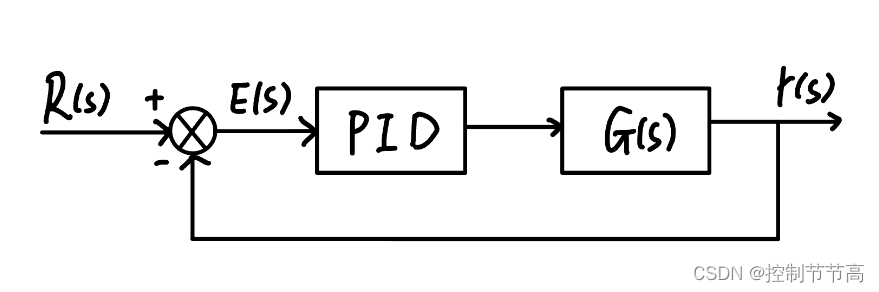
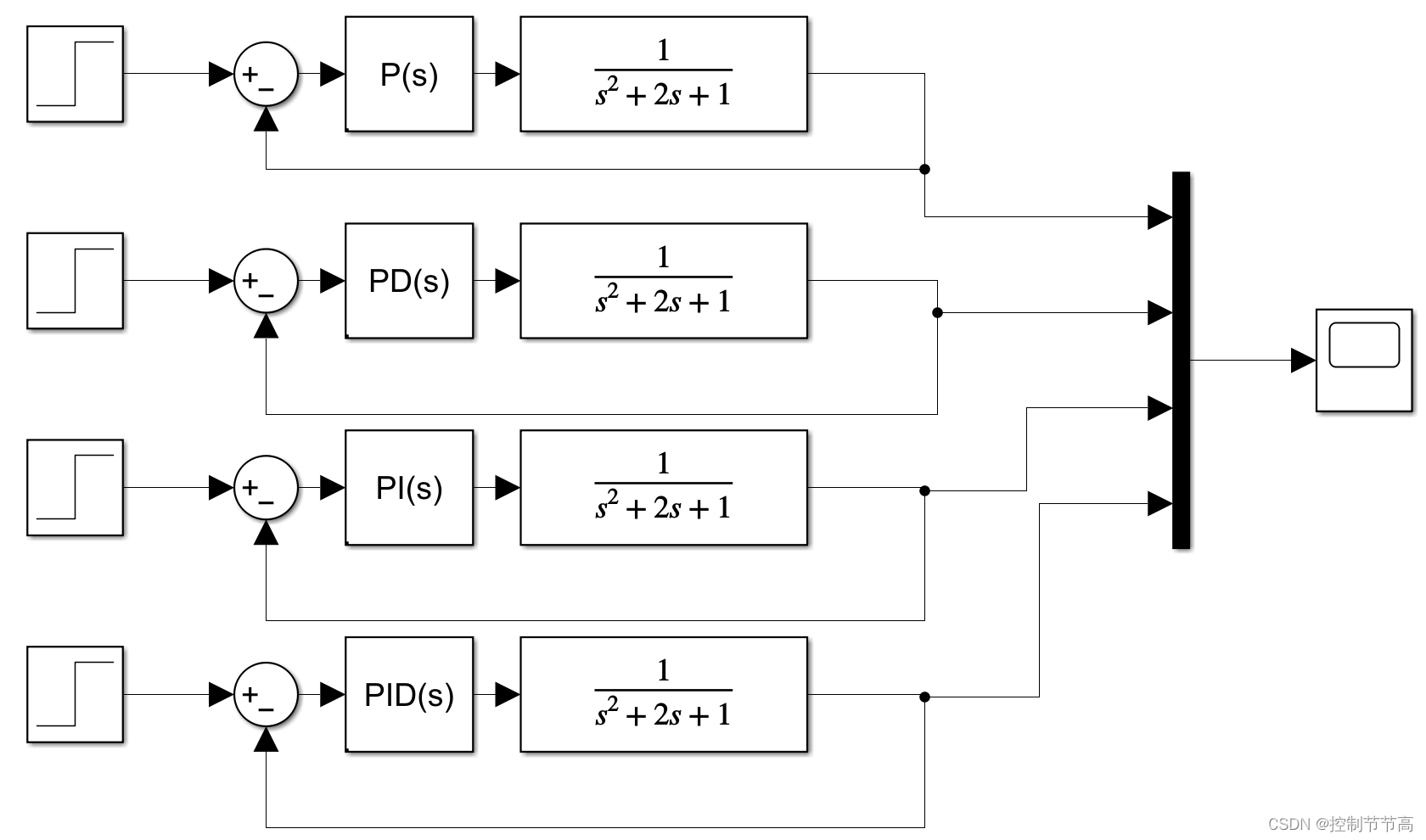
加入PID控制器后,系统的控制框图变为:
图中E(s)为系统输出与参考输入之差,即误差,误差在经过PID控制器的作用后,得到控制器输出量,即为被控对象的输入量,对于这些基本概念,可参考如下链接中所述。 【控制专栏】—第1节 控制的基本概念(反馈、闭环控制、开环控制、控制输入、参考输入、控制器等)_控系统的参考输入-CSDN博客经过PID控制器的校正后,便可以得到令我们满意的控制系统特性与输出响应。 其中,PID控制器的输出u(t)可以表示为:
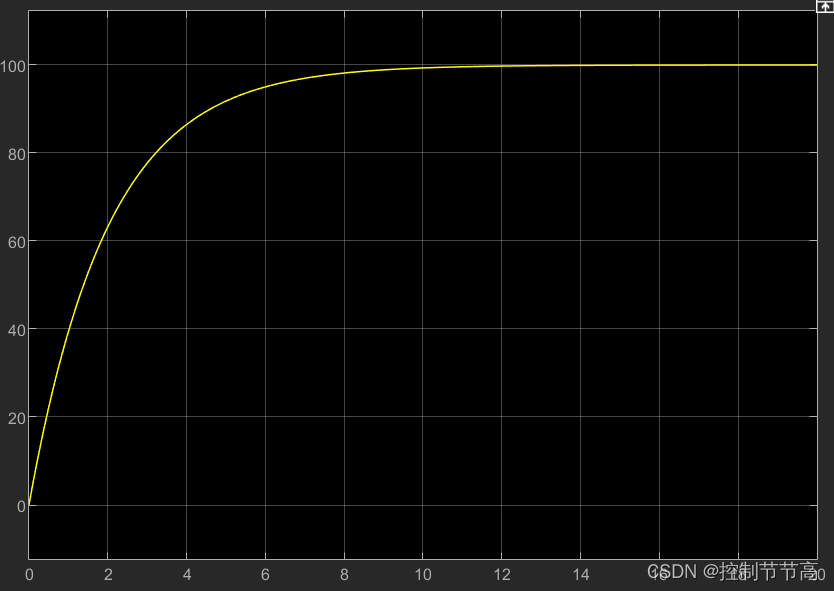
式中KP为比例系数,TI为积分时间常数,TD为微分时间常数,KI则为积分系数,KD为微分系数。很明显有积分时间常数越大,积分系数越小,积分作用越弱;微分时间常数越大,微分系数越大,积分作用则越强。经过拉氏变换后表示为: 在离散系统下同理有PID控制规律为: 从表达式得出:比例控制是对“当前”误差的作用,积分控制是对“过去”所累积误差的作用,微分控制则是通过对误差变化率的引入,对“未来”误差进行作用,以上三种作用将会在下文中附加例子详细解释。 2.为什么需要PID控制?其实1中已经说明了PID控制器的作用,那就是对误差进行调控,从而保证系统输出是我们所期望的。但为什么需要对误差进行过去,现在和将来的控制呢,直接差多少补多少不就好了吗? 举个通俗的例子,如果你想烧一壶80℃的水,而它当前的温度是20℃,即输出与参考输入误差为60,那么被控对象,也就是烧水器就应该以提升60℃为目标输出功率,烧到我们的目标值80℃就可以关火了。我们控制烧水器的输出功率,这就相当于仅仅只有一个比例控制器,如果水温过低,温差变大,比例控制器输出就会变大,反之亦然。但是现实是:当我们由当前误差经过比例控制器设定了目标输出功率后,需要一定的上升时间才能够到达指定功率,同时在关火后,大功率烧水器存在余热还会使水温继续升高,也就是存在着系统的响应延时,等价于原系统传递函数G(s)中的惯性环节等,这会使得系统过冲、震荡或存在持续误差(如图1所示,二阶振荡传递函数模拟延时现象)而无法得到期望输出,且动态性能差。这时就需要引入PID控制器,对误差进行宏观调控,包括了对当前的误差,误差的累积项以及误差变化率的预测整体分析,通俗解释就是:(什么是PID?讲个故事,秒懂! - 知乎 (zhihu.com)) 它可以将需要控制的物理量带到目标附近(比例)它可以“预见”这个量的变化趋势(微分)它也可以消除因为散热、阻力等因素造成的静态误差(积分)每一项的具体作用将分别进行分析。
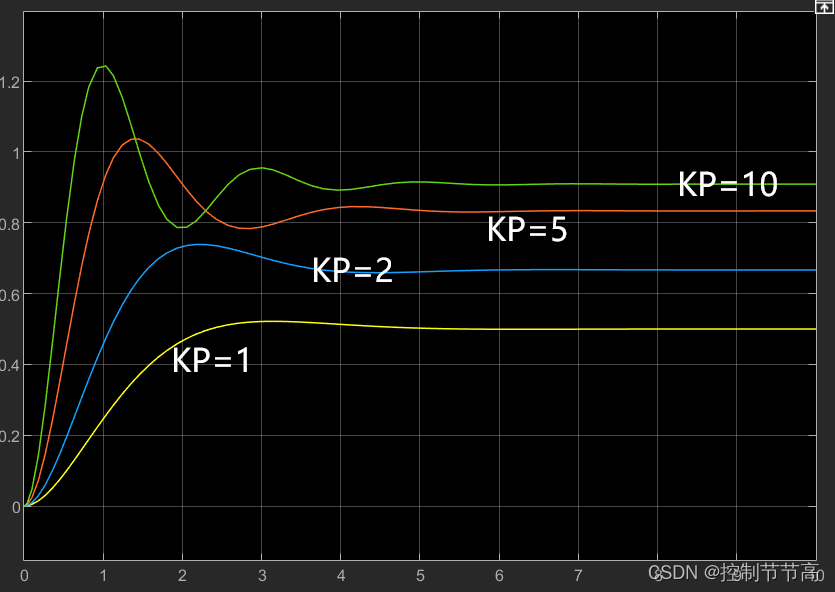
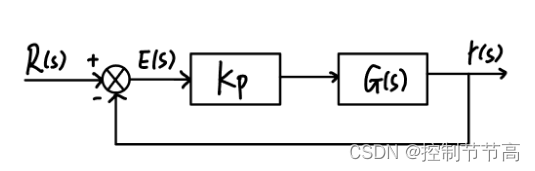
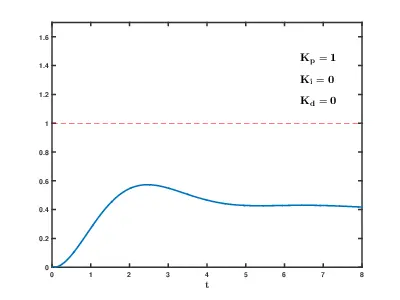
仅有比例项的控制器表达式为
从图中分析得出:增加比例系数KP,能够加快系统响应速度,同时减小稳态误差,使输出不断接近期望值。但若为了接近期望值而取较大的比例系数,如50,虽然此时稳态误差减小了,但会引起系统在平衡位置附近的超调和震荡(如图),导致动态性能变差,甚至会使系统不稳定。
尽管在大的比例系数下能够减小稳态误差,但单比例控制会使稳态误差永远存在,证明如下:
有 对于原系统传递函数G(s),其分母最高次数n大于等于分子最高次数m,因此 再举一个更直观的例子:假如单比例控制不存在稳态误差,那么在系统输出值=目标值的情况下,系统当前误差为0,相应的控制器输出就为0,那此时系统输出值必然也无法保持在目标值下了,因此稳态误差是一定存在的,以维持控制器输出值与误差的平衡状态。 由于单比例控制器存在上述控制问题,因此其通常不会单独使用,从而引入了积分和微分控制器。 4.(I)积分控制积分,就是无限求和,对误差来说就是误差的不断累积。对于一个自动控制系统,当它进入稳态后,若一直存在误差,即该系统为有差系统,并且比例项的作用已经无法消除当前误差,此时引入积分项,在累积的作用下,即使保持不变的稳态误差也会随着累加而不断增大,这样即便稳态误差很小,积累后也会逐渐增大而推动控制器进行误差的补偿,从而达到消除稳态误差的作用。 再举一个池塘放水的例子(若只放而不累计,则输入1L,输出1L,即系统的前向通路传递函数为1,在单位反馈下系统传函为G(s)=1/2),现实是池子里的水会一直累积,那么假设我们希望池子里有100L的水,但目前只有10L,则当前误差就是90L,假设增益为0.5(可以是系统增益,也可能是控制器增益系数),那么会在放出45L的水来减小这个误差,此时池子里的水已经有55L了,误差为45L,那么会再次输出22.5L来减小误差,10→55→77.5→...则水会无限接近于100L,也就是我们的目标值,如图所示。
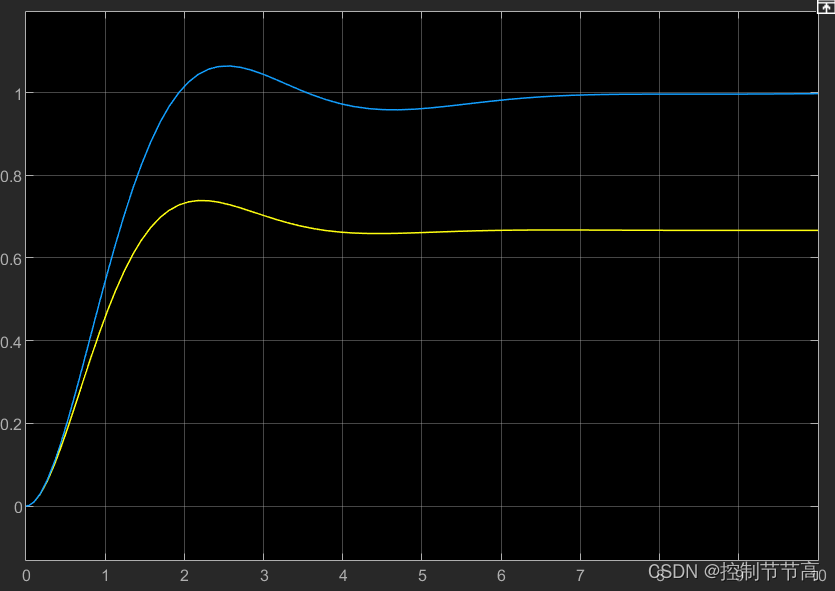
这便是一个累积,即积分的过程,积分作用为 将比例和积分作用相加,即构成了比例-积分控制器,作用为 稳态误差无限趋于0。以3中传函
PI控制器传函为 对误差信号的微分,即为求误差的变化率,只有当误差随时间变化(即变化率不为0)时,微分项才会起作用。微分可以理解为“阻尼”,在误差减小过程中,如果这个减小的过程越来越快(一般是在比例或积分项起作用下),那么误差的变化率是增大的,此时便“预测”之后的误差变化也会加大,则需要微分项起作用,去抑制这种由于比例或积分项引起过大的变化率,从而减小系统未来可能会发生的超调与过冲;如果误差变化率较小,则微分项起作用也较小。同时在系统输出接近目标值时,误差变化率会逐渐减小,微分项也会逐渐减小对震荡的抑制作用。但注意不能使用单独的微分控制,原因是(仍以单位阶跃输入为例) 稳态误差恒为1,即稳态误差恒为输入,这是不可以的。以3中传函
微分作用可以增大系统的阻尼,减小系统的超调量并增加稳定性,同时由于其对误差变化率的积极响应,使得其对输入的瞬时变化更加敏感,因此会使响应的上升时间减小,快速性提高。而对于PD控制器,相当于为系统增加了一个负实部的开环零点,使系统相位超前,相角裕度提高,有利于改善系统的动态性能。但由于其对(高频)噪声有放大作用(参考s的Bode图,如图,高频段赋值为正,放大了噪声的作用),因此会使系统的抗干扰性下降。
对微分环节放大高频噪声的另一种理解:例如某高频噪声,表达式为 PID控制规律则是三种作用的组合,也就是1中所表示的控制器输出为: 表现在控制框图中即为:
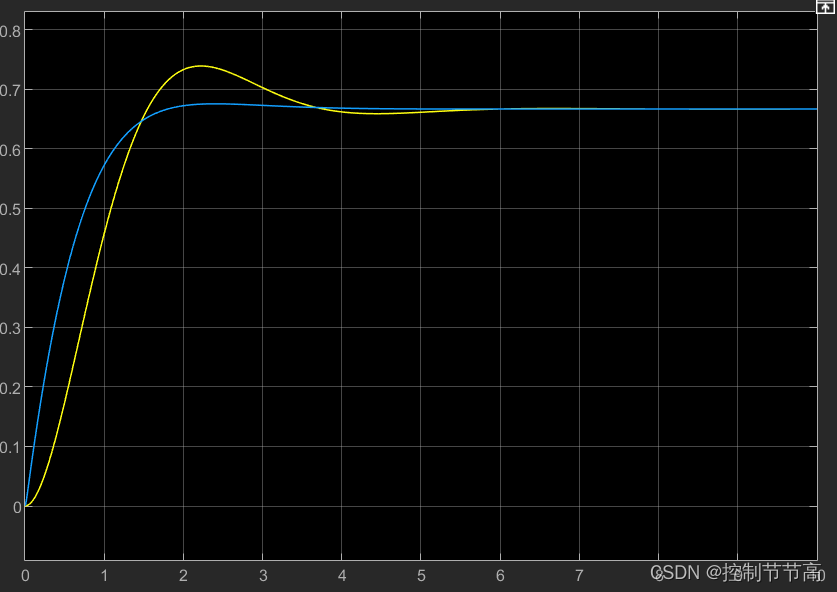
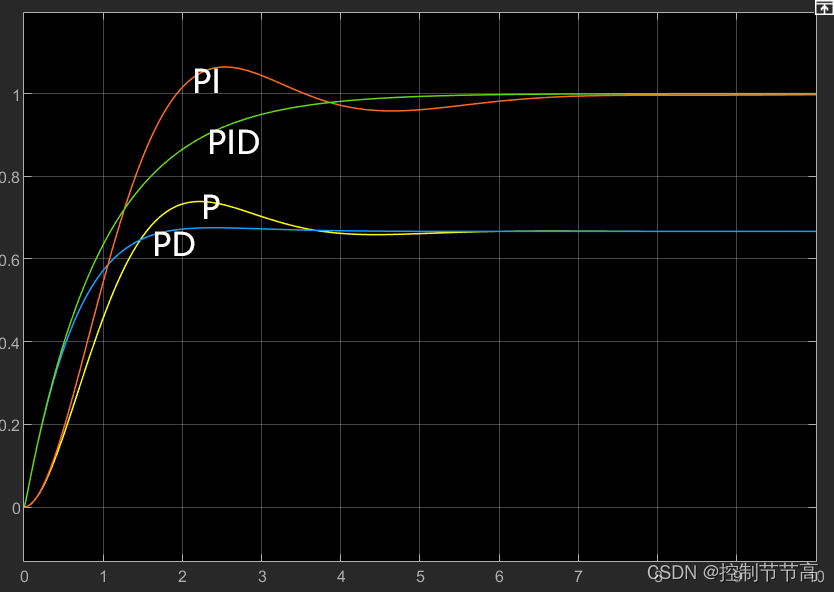
PID控制器是集成了比例-积分-微分作用的实用控制器,通过三个参数的调整使得PID controller能够解决绝大多数的控制问题。仍然以3中传函
当然这只是随机取的三个系数值,但也仍然能看出各部分的控制作用,如果对三个参数的选取再进行研究的话,那么就能够得出我们所期望的动态和稳态特性。 附上这个动画,就能够更加清晰地看出各部分的作用了,即简言之为:比例控制器减小稳态误差,加快响应速度;积分控制器消除稳态误差,改善稳态性能;微分控制器减小超调量以及震荡,改善动态性能。
关于如何调节PID控制器的三个参数以及更多内容,将在以后的文章中呈现!欢迎关注点赞收藏! |




【本文地址】
今日新闻 |
推荐新闻 |