折反射全景 |
您所在的位置:网站首页 › 折返镜头的缺点 › 折反射全景 |
折反射全景
|
全景成像
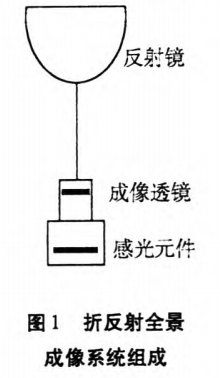
全景成像PI:从一个视点获取水平方向一周360,垂直方向大到半球以上视场的多方向成像; 立体成像:同一空间点在全向图中两次成像或在两幅全向图中分别成像 全景立体成像技术:基于全景成像技术利用双目视觉原理获取全景立体信息 全景成像VS立体成像: 全景成像是在一个视点对周围所有方向的场景成像,而立体成像需要两个或多个视点,在垂直于两视点连线的方向上获得的场景具有立体感,但在两视点连线方向上不会具有立体感 方法: 图像拼接: 使相机围绕其光心的垂直轴线旋转一周,对水平一周多个不同方向的场景成像,再将这些不同方向的场景图像进行拼接,获得一幅全景图像 。优点:分辨率高。缺点:成像速度慢,非单一视点,智能凭借圆柱面全景图像,无法实时动态全景成像。另一种是用多个相机同步拍摄。缺点:不同相机光学中心无法完全重合鱼眼镜头: 焦距短(180的全景视场。缺点:严重桶形畸变,无法校正,分辨率低折反射全景成像:利用镜头前的反射镜扩大相机的视场从而获取实时全方位图像。 折反射全景立体成像系统利用两到三个折反射全景成像系统实现全景立体成像(三个略Fig1.6)。 水平方向并列两独立装置:缺点:有遮挡垂直方向同轴两独立装置:优点:避免遮挡,立体图像极线约束良好。缺点:立体图像色差和曝光差别相机复用(一图两全景):优点:一次成像。缺点:分辨率低
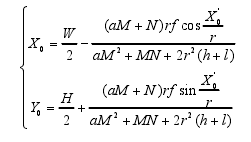
折反射全景成像:利用曲面反射镜把水平方向 360。范围内物体的光线反射到成像传感器,从而一次性拍摄获得远大于普通相机视场范围的景象。 反射镜类型 单视点(双曲面和抛物面):被反射镜面反射后通过相机的每一条入射光线的延长线都交于同一点,即在单一的有效视点对所有方向成像。优点:满足透视投影成像模型,可用针孔成像模型分析,容易进行系统标定。缺点:需要对采集的图像逆投影,计算量大。展开:全向图中,图像中每个像素都进过视点的一条入射光线,因此可以将全向图像素点投影到离视点任意距离的某个圆柱或平面上形成柱面或无畸变的平面透视图,再用传统方法进行图像处理。 非单视点:可直接获取近似透视全向图,使场景中的物点坐标与成像平面内像点坐标成线性关系。展开:
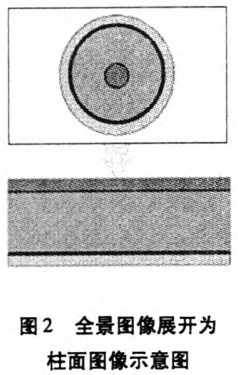
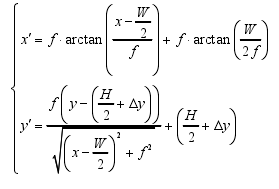
由于原始图像存在严重变形,不适合直接观察,需要把折反射全景图像进行柱面展开或者透视展开
c->b P0点的映射公式: 得到柱面全景图后,重新构造柱面视点空间每一个实现方向锁对应的透视图像
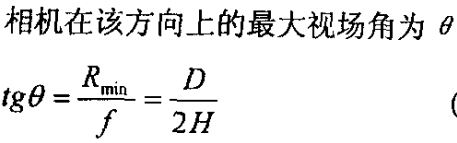
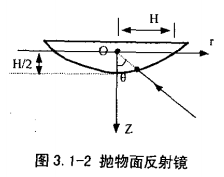
H自定义,标定求Rmin,f,实际D应该比计算值小一些 以曲面定点作为坐标原点,旋转对称轴为Z轴,反射镜面的统一表达式为
如果入射光线汇聚于一点(单视点),而反射光线为平行光线,可以推导出反射镜面为抛物面。设反射镜面形状为z = z®,入射光线汇聚于O。
由于tanθ = r/z,tan(θ/2) = -dz/dr,tanθ = 2tan(θ/2)/(1-tan2(θ/2)) 倍角公式, 所以dz/dr =z/r - sqrt(1+(z/r)^2) ,对该式求解积分方程得到 z = (H2-r2)/(2H),其中H为积分常数,反应面型,如下图
设r=ρsinθ,z=ρcosθ,则抛物面反射镜的极坐标方程为ρ = H/(1+cosθ) 确定抛物面参数
[1] 曾吉勇. 折反射全景立体成像[D]. 四川大学, 2003. [2] 陈旺. 折反射全向图像深度信息提取技术研究[D]. 国防科学技术大学, 2010 |









![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-NLTDB3ah-1576073984597)(C:\Users\blackhole\AppData\Roaming\Typora\typora-user-images\image-20191211212236346.png)]](https://img-blog.csdnimg.cn/20191211222933277.png)
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-XMzw0Hbw-1576073984598)(C:\Users\blackhole\AppData\Roaming\Typora\typora-user-images\image-20191211212638825.png)]](https://img-blog.csdnimg.cn/20191211222954609.png)

【本文地址】