【毕业设计】35基于单片机的自动门控制系统设计/电机控制系统设计(原理图+源码+仿真工程+答辩论文+答辩PPT) |
您所在的位置:网站首页 › 扫码进门系统有哪些 › 【毕业设计】35基于单片机的自动门控制系统设计/电机控制系统设计(原理图+源码+仿真工程+答辩论文+答辩PPT) |
【毕业设计】35基于单片机的自动门控制系统设计/电机控制系统设计(原理图+源码+仿真工程+答辩论文+答辩PPT)
|
【毕业设计】35基于单片机的自动门控制系统设计/电机控制系统设计(原理图+源码+仿真工程+答辩论文+答辩PPT)
文章目录
【毕业设计】35基于单片机的自动门控制系统设计/电机控制系统设计(原理图+源码+仿真工程+答辩论文+答辩PPT)资料要求任务书设计说明书摘要设计框架架构设计说明书及设计文件源码展示
资料要求
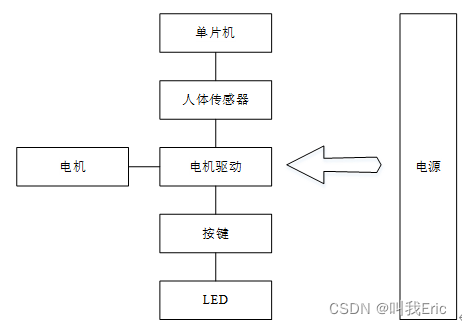
包含此题目毕业设计全套资料: 原理图工程及截图 仿真图工程及截图 源代码工程 流程图 低重复率设计说明书 详情请私信! 任务书研究内容: 研究自动门控制系统工作原理。实现自动门控制系统的设计。完成自动门控制系统硬件电路设计和软件开发。 方法:了解国内外对于自动门控制系统研究现状。复习单片机原理及其应用的相关知识。完成系统的总体设计、设备选型。 要求:使用AD软件绘制原理图、visio软件绘制流程图。使用89C51单片机作为主控芯片,对系统外围电路设计。作出系统仿真或者实物。 设计说明书 摘要本次设计是自动门控制系统的研究与设计,使用光电传感器作为感应器,检测到人体辐射的红外光线能量变化,将其转化为电信号,传给单片机。使用步进电机作为门驱动装置。通过单片机控制电机,使门自动打开,当人进门后又可以使门自动关闭。本毕业设计主要实现光电线检测和单片机控制系统设计。 本毕业设计一共分为六个章节。第一章主要通过研究分析自动门控制系统的发展背景、研究意义、研究现状。第二章主要通过分析控制系统的实现功能,绘制系统实现功能框架与硬件设计框架。第三章主要通过控制电路硬件设计,将整个电路原理图绘制,先将各个控制部分电路绘制最后将各个部分的电路汇总接入单片机引脚,组合成为整个系统。第四章为软件设计部分,同硬件电路设计,将个部分的软件设计成为子程序,最后在主函数中调用各个子函数。第五章为系统仿真实现,将硬件电路在protues软件中连接,然后导入单片机程序,最后调试,测试设计功能是否实现。最后一章总结整个系统在设计时的经验,错误,吸取经验以后防止错误发生。 设计框架架构
|
 前 言 1 第一章 绪论 2 第一节 自动门的研究背景与发展 2 第二节 电机控制的应用与发展 3 第三节 自动门的研究现状与意义 4 第四节 本文的主要研究内容 4 第五节 本章小结 5 第二章 自动门控制系统的方案分析 6 第一节 功能分析与确定 6 第二节 系统元器件方案选择 7 一、主控芯片选择 7 二、电机选择 7 三、人体传感器选择 8 第三节 系统设计总框架 8 第四节 本章小结 9 第三章 自动门控制的硬件电路设计 10 第一节 单片机最小系统电路设计 10 二、复位电路设计 11 二、晶振电路设计 12 第二节 电源电路设计 12 第三节 按键电路设计 13 第四节 LED电路设计 13 第五节 热释感应器电路设计 13 一、热释感应工作原理 13 二、热释感应电路设计 14 第六节 步进电机控制电路设计 15 第七节 系统总电路图 15 第八节 本章小结 16 第四章 自动门控制系统的软件设计 17 第一节 Keil软件介绍 17 第二节 软件总设计流程 18 第三节 按键程序设计 19 第四节 LED程序设计 19 第五节 热释感应器程序设计 20 第六节 步进电机控制程序设计 21 第七节 本章小结 22 第五章 自动门控制系统的仿真实现 23 第一节 Proteus软件介绍 23 一、启动Proteus ISIS 23 二、工作界面简介 24 第二节 仿真电路连接 24 第三节 仿真功能测试 25 第四节 本章小结 28 总 结 29 致 谢 30 参考文献 31 附 录 32 一、英文原文 32 二、英文翻译 35 三、工程图纸 37 四、源代码 38
前 言 1 第一章 绪论 2 第一节 自动门的研究背景与发展 2 第二节 电机控制的应用与发展 3 第三节 自动门的研究现状与意义 4 第四节 本文的主要研究内容 4 第五节 本章小结 5 第二章 自动门控制系统的方案分析 6 第一节 功能分析与确定 6 第二节 系统元器件方案选择 7 一、主控芯片选择 7 二、电机选择 7 三、人体传感器选择 8 第三节 系统设计总框架 8 第四节 本章小结 9 第三章 自动门控制的硬件电路设计 10 第一节 单片机最小系统电路设计 10 二、复位电路设计 11 二、晶振电路设计 12 第二节 电源电路设计 12 第三节 按键电路设计 13 第四节 LED电路设计 13 第五节 热释感应器电路设计 13 一、热释感应工作原理 13 二、热释感应电路设计 14 第六节 步进电机控制电路设计 15 第七节 系统总电路图 15 第八节 本章小结 16 第四章 自动门控制系统的软件设计 17 第一节 Keil软件介绍 17 第二节 软件总设计流程 18 第三节 按键程序设计 19 第四节 LED程序设计 19 第五节 热释感应器程序设计 20 第六节 步进电机控制程序设计 21 第七节 本章小结 22 第五章 自动门控制系统的仿真实现 23 第一节 Proteus软件介绍 23 一、启动Proteus ISIS 23 二、工作界面简介 24 第二节 仿真电路连接 24 第三节 仿真功能测试 25 第四节 本章小结 28 总 结 29 致 谢 30 参考文献 31 附 录 32 一、英文原文 32 二、英文翻译 35 三、工程图纸 37 四、源代码 38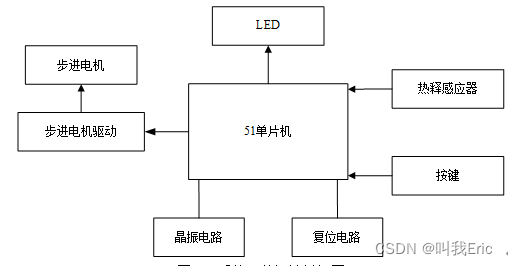

【本文地址】
今日新闻 |
推荐新闻 |