基于STM32F103单片机的智能扫地机器人 循迹避障车 原理图PCB设计 |
您所在的位置:网站首页 › 扫地机器人锂电池如何重新激活 › 基于STM32F103单片机的智能扫地机器人 循迹避障车 原理图PCB设计 |
基于STM32F103单片机的智能扫地机器人 循迹避障车 原理图PCB设计
|
系统功能设计
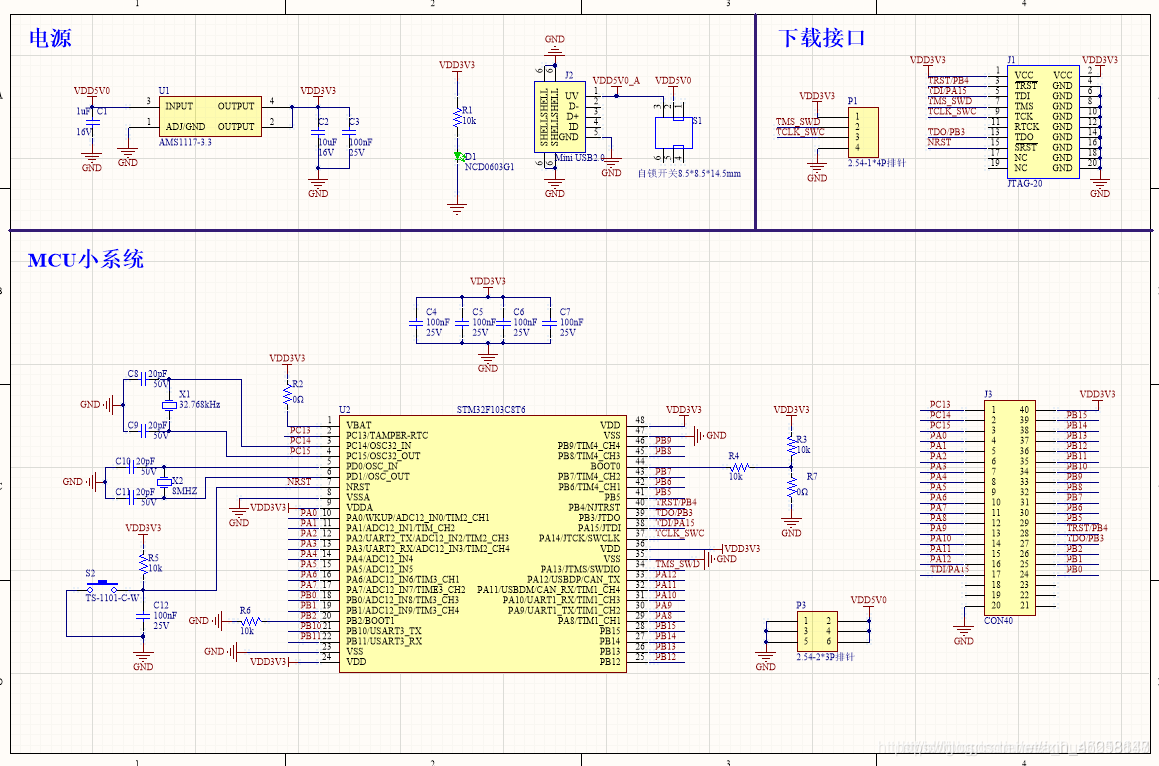
(末尾附文件) 本系统由STM32F103C8T6单片机核心板、2路红外避障模块、2路按键、风扇驱动、电机驱动、升压模块、锂电池充电模块及电池盒供电组成。 1、按下启动按键后,小车启动,同时,风扇转动吸尘;按下停止按键后,小车停止转动,同时,风扇停止转动。 2、小车在运行过程中,左侧的红外避障传感器模块检测到有障碍物,则右拐;右侧的红外避障传感器模块检测到有障碍物,则左拐;如果任何一边的红外避障传感器模块检测到障碍物超过一定时间(小车可能走不动了),则小车后退然后旋转调头。 STM32F103C8T6单片机核心板: USB供电接口,复位按键 开关按键 、HW红外循迹模块电路设计 该红外循迹传感器是基于红外对管模块的红外循迹传感器。该传感器模块对环境光线适应能力强,其具有一对红外线发射与接收管,发射管发射出一定频率的红外线,当检测方向遇到障碍物(反射面)时,红外线反射回来被接收管接收,经过比较器电路处理之后,绿色指示灯会亮起,同时信号输出接口输出数字信号(一个低电平信号),可通过电位器旋钮调节检测距离,有效距离范围 2~30cm,工作电压为3.3V-5V。该传感器的探测距离可以通过电位器调节、具有干扰小、便于装配、使用方便等特点,可以广泛应用于机器人循迹、循迹小车、流水线计数及黑白线循迹等众多场合。
链接:https://pan.baidu.com/s/1tzAZHQsGlQ8k0SD5YlY9YQ 提取码:v5sd . |
 合理优秀的布局布线:
合理优秀的布局布线: 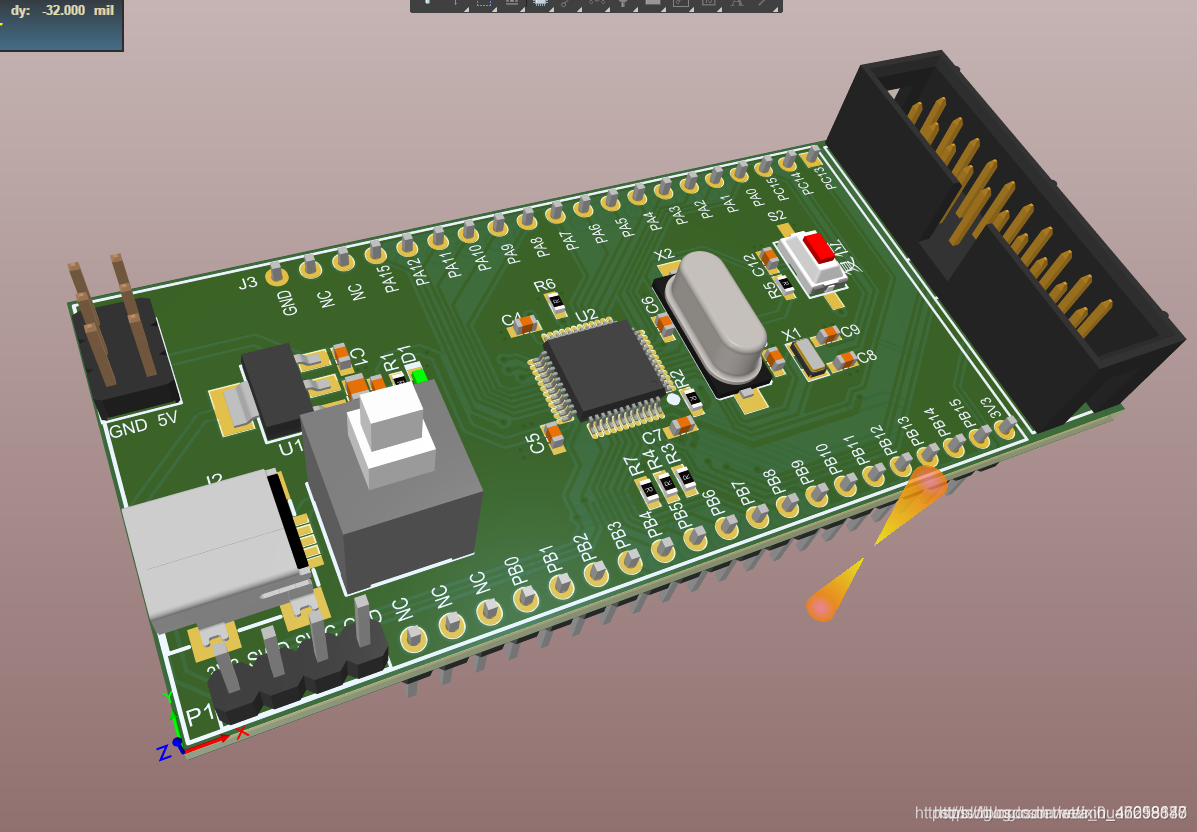
 E18-D80NK红外避障传感器模块电路设计 E18-D80NK-N 这是一种集发射与接收于一体的光电传感器,发射光经过调制后发出,接收头对反射光进行解调输出。有效的避免了可见光的干扰。透镜的使用,也使得这款传感器最远可以检测 80 厘米距离的问题(由于红外光的特性,不同颜色的物体,能探测的最大距离也有不同;白色物体最远,黑色物体最近)。 检测障碍物的距离可以根据要求通过尾部的电位器旋钮进行调节。该传感器具有探测距离远、受可见光干扰小、价格便宜、易于装配、使用方便等特点,可以广泛应用于机器人避障、流水线计件等众多场合。应用案例:生产线货物自动计数设备、多功能提醒器、走迷宫机器人等。
E18-D80NK红外避障传感器模块电路设计 E18-D80NK-N 这是一种集发射与接收于一体的光电传感器,发射光经过调制后发出,接收头对反射光进行解调输出。有效的避免了可见光的干扰。透镜的使用,也使得这款传感器最远可以检测 80 厘米距离的问题(由于红外光的特性,不同颜色的物体,能探测的最大距离也有不同;白色物体最远,黑色物体最近)。 检测障碍物的距离可以根据要求通过尾部的电位器旋钮进行调节。该传感器具有探测距离远、受可见光干扰小、价格便宜、易于装配、使用方便等特点,可以广泛应用于机器人避障、流水线计件等众多场合。应用案例:生产线货物自动计数设备、多功能提醒器、走迷宫机器人等。 .
.【本文地址】
今日新闻 |
推荐新闻 |