慧鱼实验报告(八篇) |
您所在的位置:网站首页 › 慧鱼模型搭建教程 › 慧鱼实验报告(八篇) |
慧鱼实验报告(八篇)
|
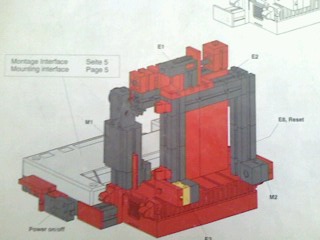
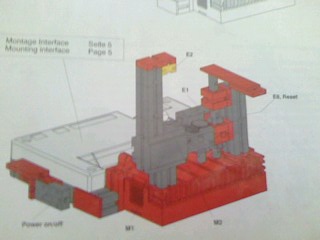
慧鱼之移动机器人 慧鱼机器人的简介:本设计是以德国慧鱼创意积木所组成的仿生模拟机器人为其基本架构,透过圈形式人机介面LLWin,经由智慧型微电脑介面板去驱动机器人,使机器人细部动作很容易达到我们需求,进而取代以往由硬体描述语言所驱动架构,不但操作简易,更可使我们了解机械运作的原理。 移动机器人的主要构件: 马达2个;光敏电阻1个;灯泡1个;限位开关6个;其他原件若干。 实验部分: 必要试验: 1.实验名称:自动门的实现 实验原理:在门外的两侧装有光敏电阻传感器,当人来到时,挡住光线,使光敏电阻获得信号,马达开始运作,门打开,开到一定的程度,碰到限位开关,马达停止,开门完成。人过去之后,一定时间(事先设置好),马达反方向运作,门反方向运动,到一定程度时碰到限位开关,马达停止,关门完成。 主要构件: 马达 限位开关 灯泡 光敏电阻 实验图:
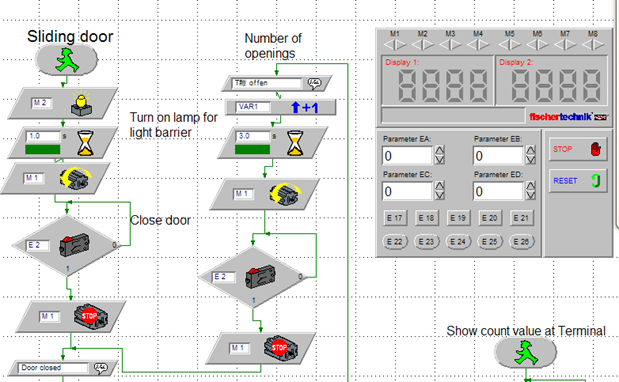
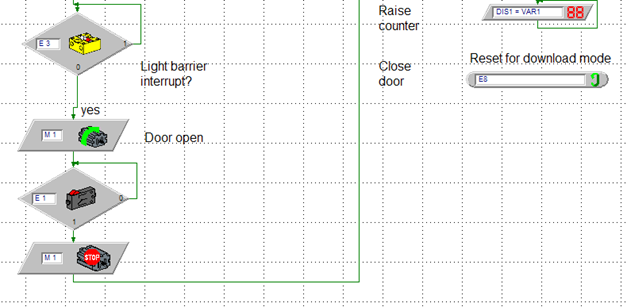
实验程序:
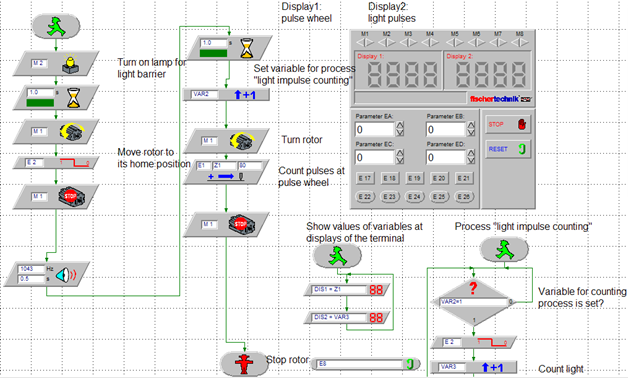
实验总结:本实验比较简单,组装起来比较简单。但告诉了我们自动门的一种工作原理,比较实用,有意义。 2实验名称: 计数器 实验原理: 利用马达运作带动上面的计数板转动,当计数板挡住灯泡的光线时,光敏电阻获得信号,程序计数一次。 主要构件: 马达 光敏电阻 灯泡 实验图:
实验程序:
实验总结:本实验内容较为简单,组装起来也比较简单,是是一个简单但很实用的小装置。 3 实验名称: 实验原理: 利用马达的转动,通过齿轮和杠杆的传动传给重物,当重物向下运动时,挡住灯泡的光线时,光敏电阻获得信号,改变状态,程序计数一次。如此反复。 主要构件: 马达 灯泡 光敏电阻 实验图:
实验程序: 实验总结 4实验名称: 小汽车 实验原理: 两个马达分别控制两个轮子的转动,利用马达同向转动时实现小车的向前向后走动,马大不同转向实现小车的左转右转。 限位开关的不同状态控制马达的转动。 …… …… 余下全文 |

【本文地址】