平台式惯性导航系统简介(持续更新ing) |
您所在的位置:网站首页 › 惯性导航系统组成有 › 平台式惯性导航系统简介(持续更新ing) |
平台式惯性导航系统简介(持续更新ing)
|
惯性导航系统是利用惯性敏感器件,通过基准方向、初始位置等信息来确定运载体位置、姿态和速度的自主式航位推算系统。平台式惯性导航系统是与捷联式惯性导航系统相对应的一种导航方式。 目录 前言 一、前备知识 1. 惯性导航常用坐标系 2.哥氏加速度 3. 坐标变换方法 (1)欧拉角法 (2)四元数法 4.加速度计与比力方程 5.误差对导航精度的影响 6.矢量叉乘的矩阵形式 二、指北方位惯导系统力学编排 1.平台指令角速度 2.速度方程 3.经纬度方程 4.高度通道 更新日志 前言本文拟简要介绍平台式惯性导航系统(Platform Inertial Navigation System)。本文内容主要来源于作者本人的学习过程,参考书籍为秦永元编著的《惯性导航》(第三版)。本文将持续更新,逐步完善。  图1 参考书《惯性导航》
图1 参考书《惯性导航》
平台式惯性导航系统简称平台式惯导,根据百度百科,其为将惯性敏感器(陀螺仪Gyroscope以及加速度计Accelerometer)安装在一个稳定平台上,以平台坐标系为基准测量载体运动参数的惯导。平台式惯导系统中,采用机电控制的方法建立起相对稳定的物理实体平台,用于模拟载体所要求的导航坐标系。 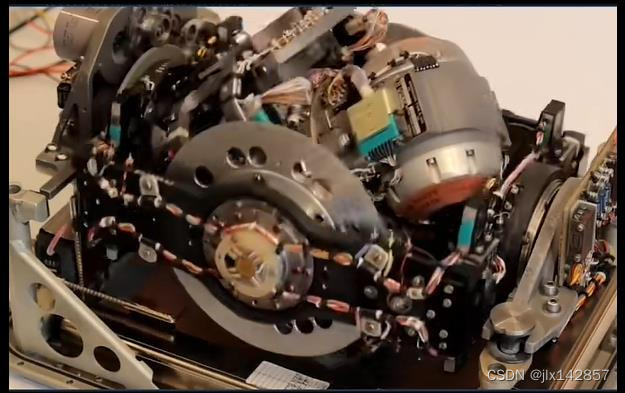 图2 惯性导航平台装置
图2 惯性导航平台装置
惯性导航平台视频(bilibili) 平台式惯导利用惯性平台隔离运载体的角运动,在导航坐标系旋转比较缓慢的情况下,导航计算机的解算负担较轻。在20世纪60-70年代,平台式惯导是在计算机技术没有充分发展的情况下的一种利用精密机械的导航替代方案,然而其缺点也十分明显,如结构复杂、体积大、重量重、可靠性差等。随着新一代的陀螺技术的日渐成熟,平台式惯导逐步被捷联式惯导所取代。然而,作为惯性导航领域里的经典工程实现,平台式惯导所渗透的思想可以说是永恒不灭的。 平台式惯性导航系统大致分为三种:1、指北方位惯导系统;2、自由方位惯导系统;3、游动方位惯导系统。 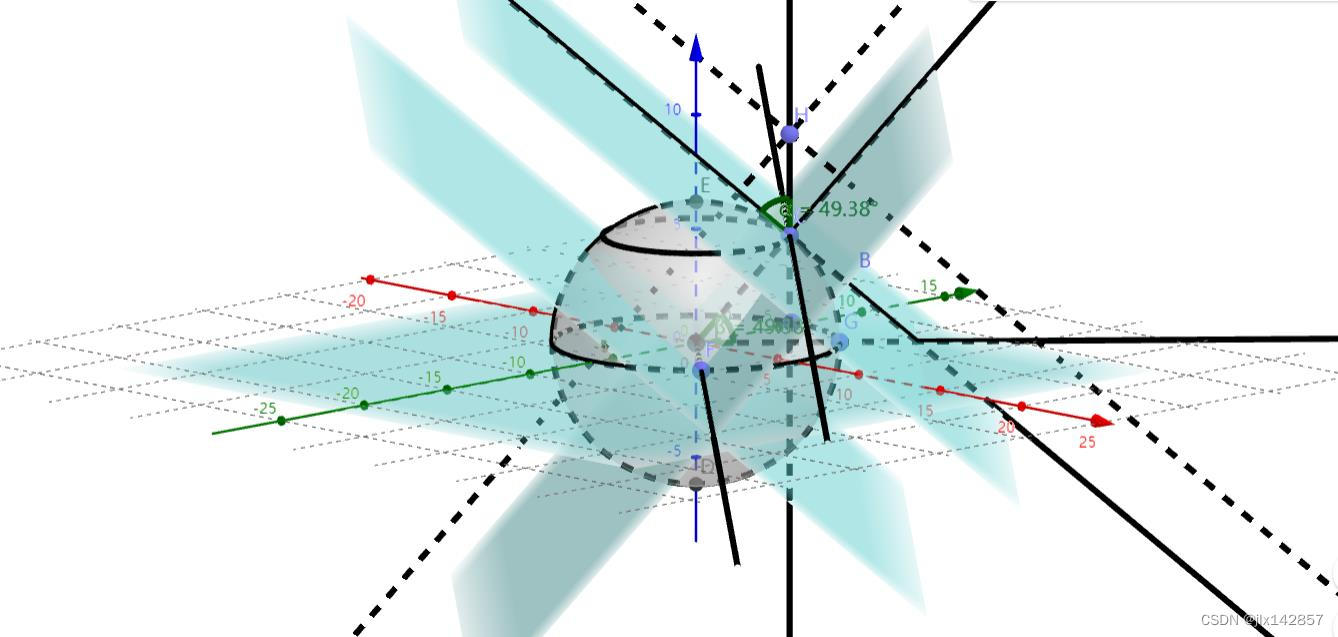 图3 惯性导航系统地球坐标系示意
一、前备知识
1. 惯性导航常用坐标系
图3 惯性导航系统地球坐标系示意
一、前备知识
1. 惯性导航常用坐标系
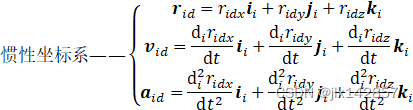
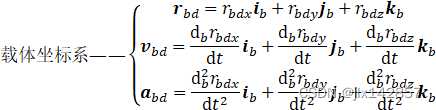
首先,建立任何坐标系的前提是务必保证xyz三轴符合右手定则,即右手手掌心位于坐标系原点,四指伸向x轴正方向,随后握向y轴正方向,此时z轴正方向应与大拇指伸出的方向保持一致。 1、地心惯性坐标系 i:可用inertia(惯性)-i理解。 2、地球坐标系 e:原点位于地心,x轴穿越本初子午线与赤道的交点;z轴穿越地球北极点,y轴穿越东经90度子午线与赤道的交点。可用earth(地球)-e理解。 3、地理坐标系 g:原点位于运载体质心,xyz轴正方向分别指向运载体所处地理位置的东向、北向与天向(沿地球极轴向外)。可用geography(地理)-g理解。 4、导航坐标系 n:用于导航解算的参考坐标。 5、理想平台坐标系 T:导航坐标系理想化无误差的复现(跟踪)。或许可用平台简写PT的T理解(x)。 6、实际平台坐标系 P:由平台台体上的惯性仪器敏感轴确定,是导航坐标系理想化跟踪后的实际情况,相较于理想情况的T系存在平台失准角。或许可用平台简写PT的P理解(x)。 7、机体坐标系 b:原点位于飞机等运载体质心,xyz分别指向机体的右方、前方与上方。欧美和苏联在该系的使用上有所区别。可用body(载体)-b理解。 2.哥氏加速度惯性导航中最重要的理论莫过于哥氏加速度(Coriolis Acceleration)理论。本节主要介绍描述物体牵连运动的哥氏加速度。 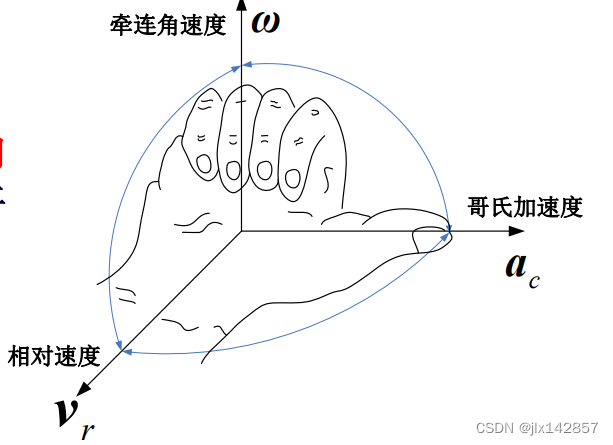 图4 牵连角速度示意图
图4 牵连角速度示意图
哥氏加速度描述质点在运动坐标系中的相对运动与动坐标系之于惯性坐标系的牵连旋转运动两方面的相互影响。设惯性坐标系的位置固定,描述为 当载体相对于惯性坐标系进行牵连旋转运动,该运动角速度设为
设惯性坐标系原点到载体坐标系原点的向量为 考察质点 对于前三项而言,可以看做是无牵连运动的情况,即有 而对于后三项,载体坐标系 代入得 再由载体坐标系位置向量分解,代入得到位置向量的哥氏定理表达式 进而得 对式两端在惯性坐标系中对时间求导,得到质点 对上式两段用哥氏定理,得 对于牵连角速度 可进一步得 综合各式得载体的绝对加速度表式 为了便于推导,令载体坐标系与惯性坐标系原点重合,并将牵连角速度
Ω ——载体坐标系相对于惯性坐标系的旋转角速度 2Ω r ——表示质点 dΩ/dt×r ——表示质点 Ω×r ——表示质点 此即简化的加速度哥氏定理。 3. 坐标变换方法尽管与高等代数、矩阵分析、现代控制理论等其他学科中的一些概念相类似,但在惯性导航理论中,坐标和坐标系的概念有必要着重重申。 所谓坐标,即是为确定空间中一点的位置,按规定方法选取的有次序的一组数据;而所谓坐标系,则是一个能够使得系统中的每一个点和一组n个标量构成一一对应关系的n维系统。 对于我们的任务——导航而言,其恰恰以精确地描述运载体的运动轨迹为目标,明确坐标和坐标系的意义之重大不言而喻。因此在惯性导航理论中,绪论后的第一个学习内容往往是坐标变换,即描述不同坐标系间转化的数学方法。关于坐标系之间的转化,一般有平动和转动两种情况。相信大家不难相信,平动的情况较为简单,仅仅只是把初始坐标系的原点搬移到新坐标系的原点处,空间中相同点的两坐标系中的坐标变化可以用向量的加法描述;而旋转的情况相比之下较为复杂。 对于坐标系的旋转变换,比较基础的方法是欧拉角法,稍进阶的方法是四元数法,如下。 (1)欧拉角法 请试想一个普通的空间坐标系 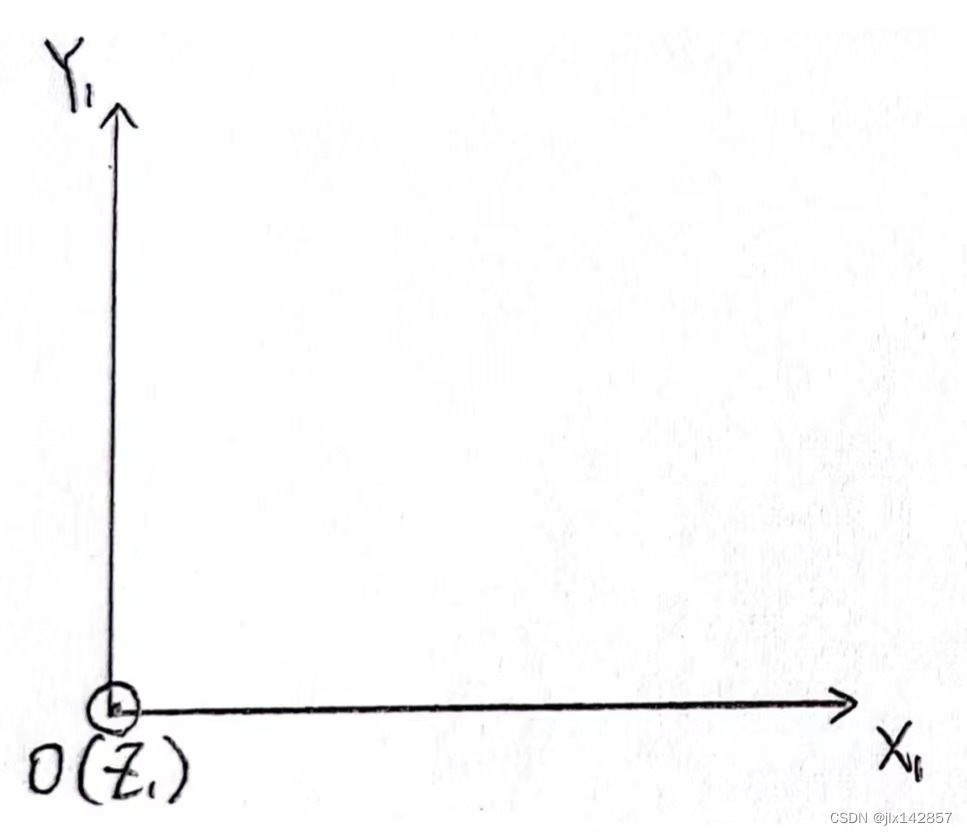 图5 初始坐标系O-X1Y1Z1
图5 初始坐标系O-X1Y1Z1
设想一空间矢量 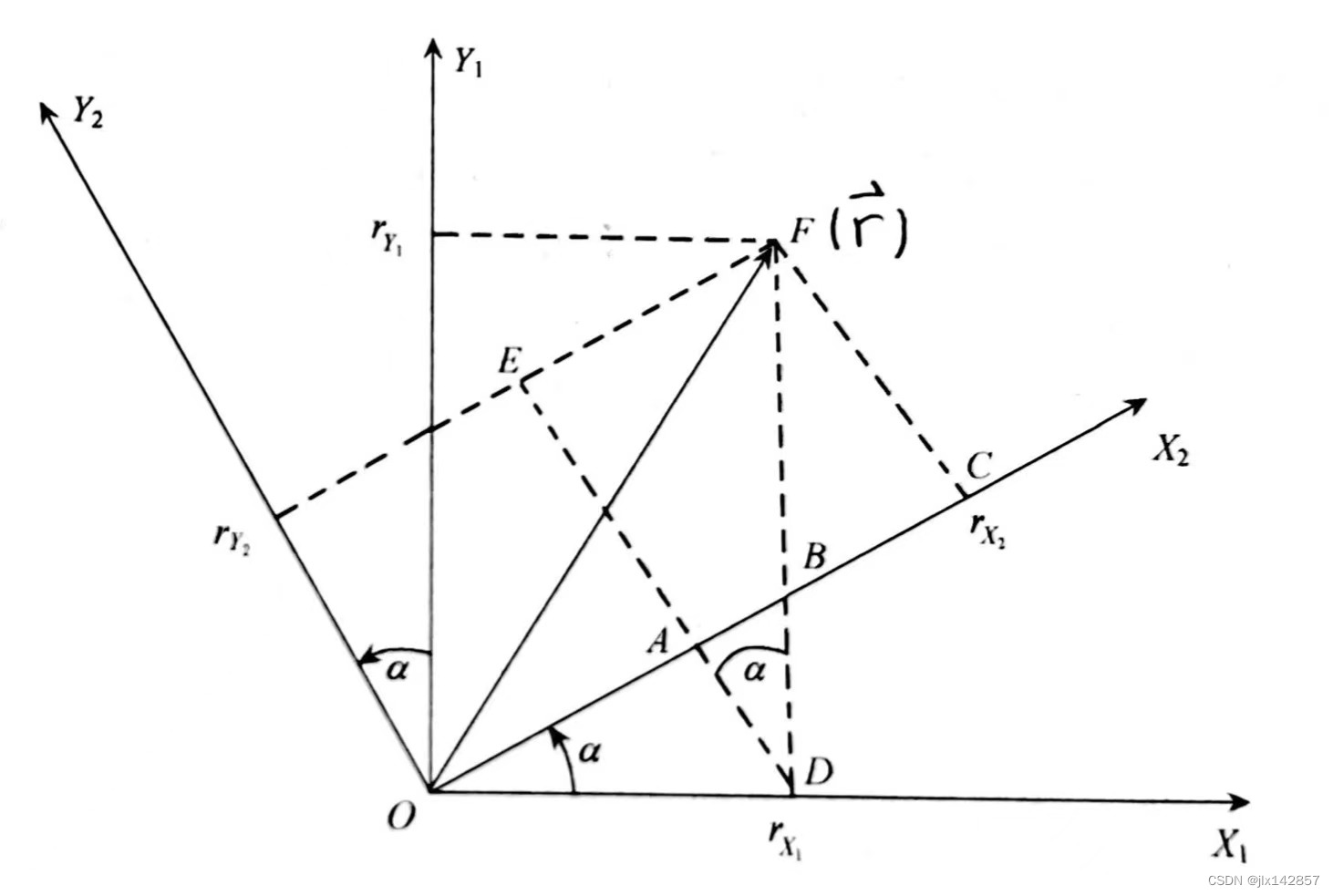 图6 旋转后坐标系
图6 旋转后坐标系
考察坐标 再加上之前得到的 可将上式简化记为 其中 在此之前,请让我们思考一个和欧拉角有关的结论:从一个坐标系到另一个坐标系的任何复杂的角位置变换过程都可以看做是三次欧拉角变换的复合。例如,运载体的空间姿态变化可以视作其机体坐标系(详见“惯性导航常用坐标系”一节)依次绕航向轴、俯仰轴、横滚轴做基本旋转后的复合结果。请看《惯性导航》一书中的下例: 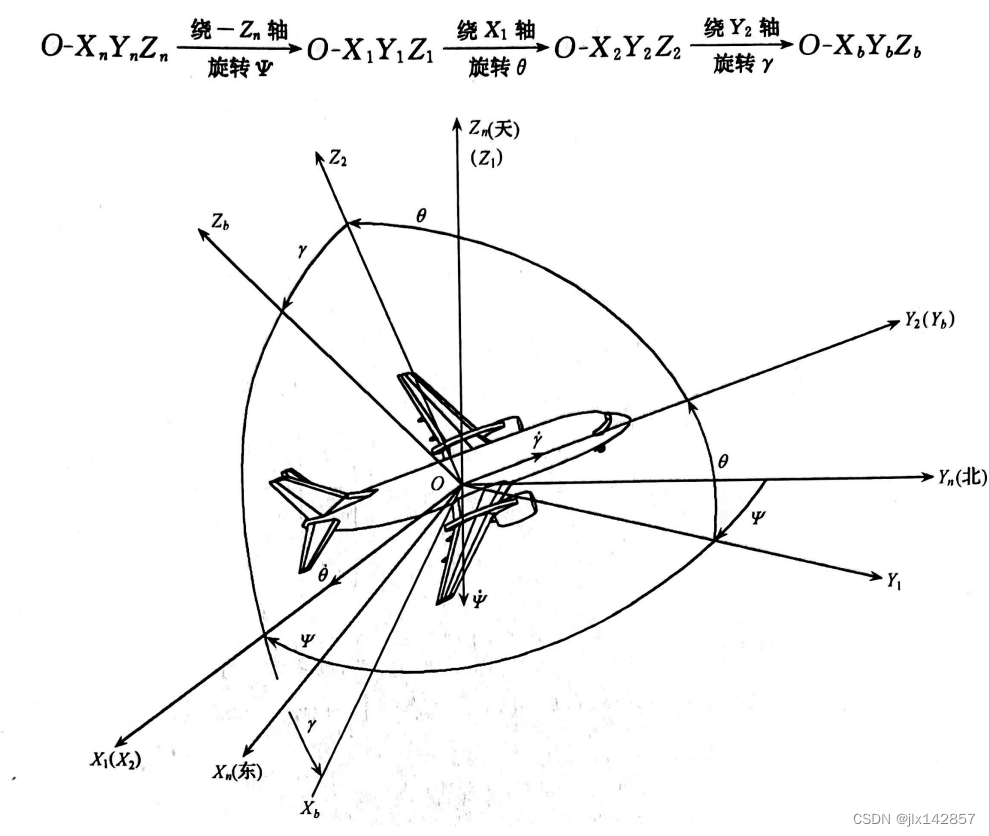 图7 地理-机体坐标系的三次欧拉角变换
图7 地理-机体坐标系的三次欧拉角变换
图中,以 按照图中所示的旋转次序,每次旋转对应一个变换矩阵 需要注意的是,矩阵中正弦函数形式的元素,正负号应当与旋转角的方向相联系,不能一概而论;但是可以发现的规律是,欧拉角绕哪个轴旋转,其变换矩阵中该轴对应的行(列)种元素为0或1,而剩余的四个位置元素,左上和右下是余弦项,左下和右上是正弦向,符号由旋转角的旋转方向与三角函数诱导公式决定。显然,变换矩阵形式上均为反对称矩阵。 关于变换矩阵,必须提及其最重要的性质,即任何一个变换矩阵均为正交矩阵。现以上述绕 故有下式成立 即变换矩阵为正交矩阵,其两两正交的行(列)向量也足以佐证这一点。 相较于旋转过程,我们可能更关注坐标系旋转的始末状态。下面考虑由地理坐标系经过三次旋转后得到机体坐标系的综变换矩阵,也被称为姿态矩阵,用 在对上式进行进一步处理之前,我们需要明确一件事:由于矩阵乘法运算有“左乘”和“右乘”之分,三次坐标变换对应的变换矩阵也不可随意相乘;具体原则为,将“先变换”的置右,“后变换”的置左(如上式,先进行 合并上式计算结果,得 当三轴旋转角 此时,旋转后坐标系的角位置与旋转次序无关。 综上可得坐标系旋转的一般关系,设坐标系 待填充 4.加速度计与比力方程众所周知,实现惯性导航必备的元器件是一系列被称作惯性器件的敏感元件,主要是陀螺仪和加速度计。其中陀螺仪主要负责测量载体角速度,而加速度计则另有分工。 对于加速度计的职能,我们可以顾名思义,但是别太彻底。加速度计,简称“加计”,其输出与载体运动加速度成一定关系的信号,其输出信号的单位与性质与“加速度”相一致,但实际是输出一个名为“比力”的物理量而非载体的运动加速度。而比力,则表征载体相对惯性空间的绝对加速度和引力加速度之差。 设加速度计质量块质量为 需要提示的是,微分运算符 其中 此即比力,表征单位质量上作用的非引力外力,或载体相对惯性空间的绝对加速度和引力加速度之差。 若将矢量相对惯性坐标系 式中 再次对上式在惯性坐标系下两边取微分,以求得绝对变化率,得 由于 取平台坐标系 根据矢量关系,有 再由 得到 事实上,式中的  图8 地球旋转引起的向心加速度
图8 地球旋转引起的向心加速度
根据矢量叉乘运算的右手定则及表达式,可得 注意到矢量 此时,请看《惯性导航》中的下图,回顾初中学习万有引力定律和地球重力加速度的场景。 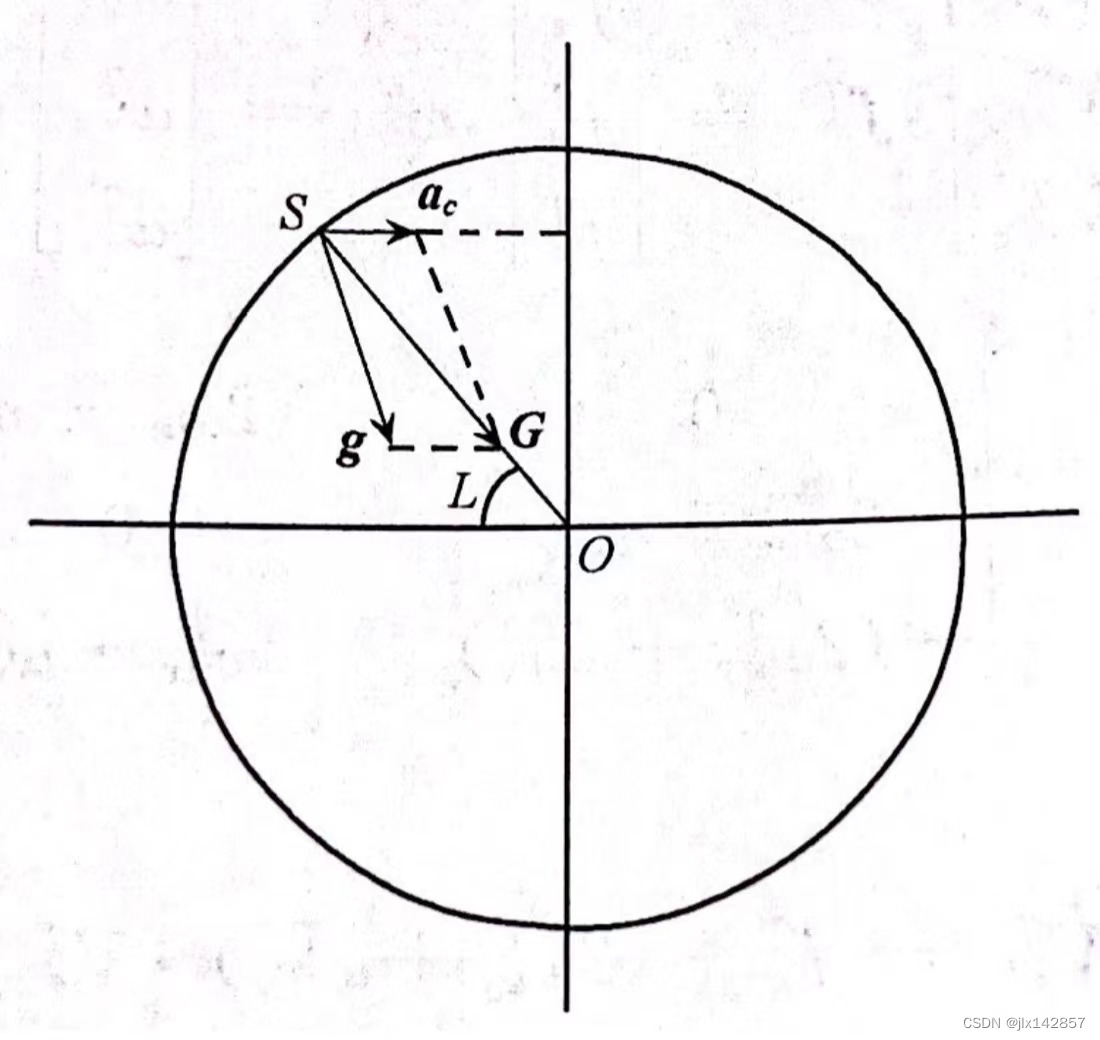 图9 引力加速度的两个分量
图9 引力加速度的两个分量
不再赘述,显然有 综合各式,得到 此即惯性导航系统的基本方程——比力方程。 需要说明的是,比力方程左端的 在回答这个问题之前,我们首先需要回答的是:我们使用加速度计的初心是什么?显然是获得载体的运动速度,而由于多数时候我们人在地球上,所以我们期望获得载体相对地球的运动速度,即地速。而根据比力方程,其中 有害加速度有三,其一,为哥氏加速度 惯性导航系统的结构安装与惯性器件本身的加工不可避免的存在误差,下面对惯性器件本身的误差对系统导航精度的影响进行感性认识。 首先介绍结论, 惯性导航系统的结构安装与惯性器件本身的加工所引起的误差将随时间累积,且陀螺仪的误差影响比加速度计大。 对于加速度计和陀螺仪而言,前者输出载体比力,后者输出载体运动角速度,二者均需要在一定时间内两次积分以得到载体的位置信息。积分运算是引起误差累积的罪魁祸首。 关于二者对惯性导航精度的影响孰轻孰重,请看下述分析。现设加速度计常值零偏为 由此可见加速度计零偏所引起的载体位置误差量级为时间的二次方,而陀螺仪漂移相应则为时间的三次方;故后者对惯性导航精度的影响大于前者。 6.矢量叉乘的矩阵形式 矢量叉乘为矢量基本运算之一,遵循右手定则。我们熟知的向量叉乘往往是行列式形式,设第一个运算数为 在惯性导航的各类方程推算中,矢量的叉乘常使用矩阵形式,设矢量 指北方位系统以地理坐标系为导航坐标系,即理想平台坐标系 而地理坐标系的旋转角速度 首先看第一项,由于理想平台坐标系
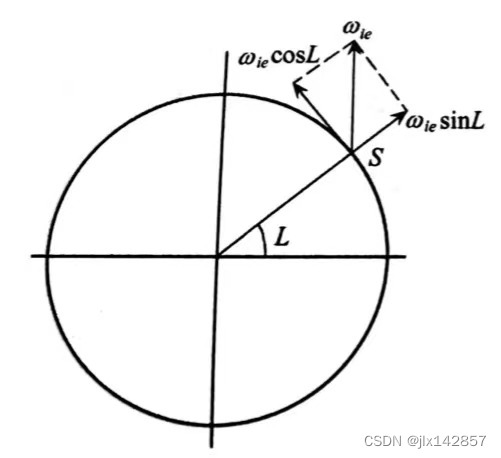
地球旋转角速度 对于由运载体运动引起的相对地球的旋转角速度
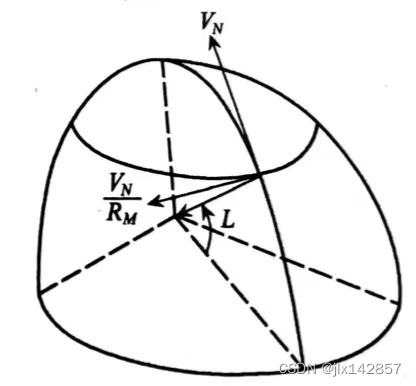
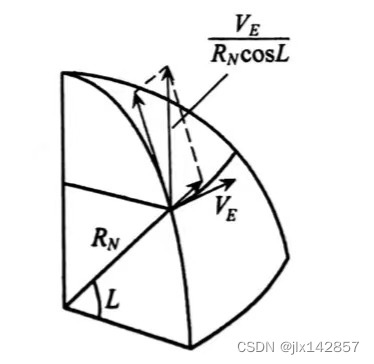
载体的北向速度 其次,看运载体的东向速度
该东向速度沿当地纬度圈,故产生一沿地球旋转轴的角速度分量(与 事实上,请让我们感性地比较地球旋转角速度 综合两种角速度的表达式,得到目标为跟踪地理坐标系的平台指令角速度如下 关于速度方程的推导,其思路比较直接,将上节所求的角速度代入先前求得的比力方程即可;由于飞机速度 将向量及叉乘运算写成矩阵形式,即 将上节所求的两个角速度值代入,得下述三个方程 由于无论是飞机还是舰船,其垂直速度 其中 然而,对于垂直速度而言,纯惯性高度通道是发散的,需要采用外部高度信息(其他仪表的高度测量值)来引入阻尼,以使系统稳定。关于这一点,将在本章后续小节说明。 3.经纬度方程 运载体在地球表面运动,容易判断其北向速度分量引起所处位置的纬度发生变化,东向速度则引起经度变化,与“平台指令角速度”中的分析类似,若设纬度变化为 运载体当前的经纬度通过上式积分得到,即 关于速度 更新日志2022.10.18 (Tues.):首次发布,前言及前备知识中的哥氏加速度和常用坐标系部分。 2022.10.20 (Thur.):更新目录,更新坐标变换方法和部分欧拉角法。 2022.10.27 (Thur.):更新欧拉角法至三次欧拉角变换的姿态矩阵。 2022.10.28 (Fri.):完善欧拉角法,更新部分比力方程;修改文章目录,调整小节次序。 2022.10.29 (Sat.):完善比力方程推导,修改部分公式显示问题。 2022.10.30 (Sun.):更新误差对导航精度影响小节,平台指令角速度小节;修改文章目录。 2022.10.31 (Mon.):更新矢量叉乘小节,速度方程与经纬度方程小节;修改文章目录。 |
【本文地址】
今日新闻 |
推荐新闻 |