ARM Linux DIY(五)摄像头调试 |
您所在的位置:网站首页 › 怎样测试摄像头安装成功 › ARM Linux DIY(五)摄像头调试 |
ARM Linux DIY(五)摄像头调试
|
前言
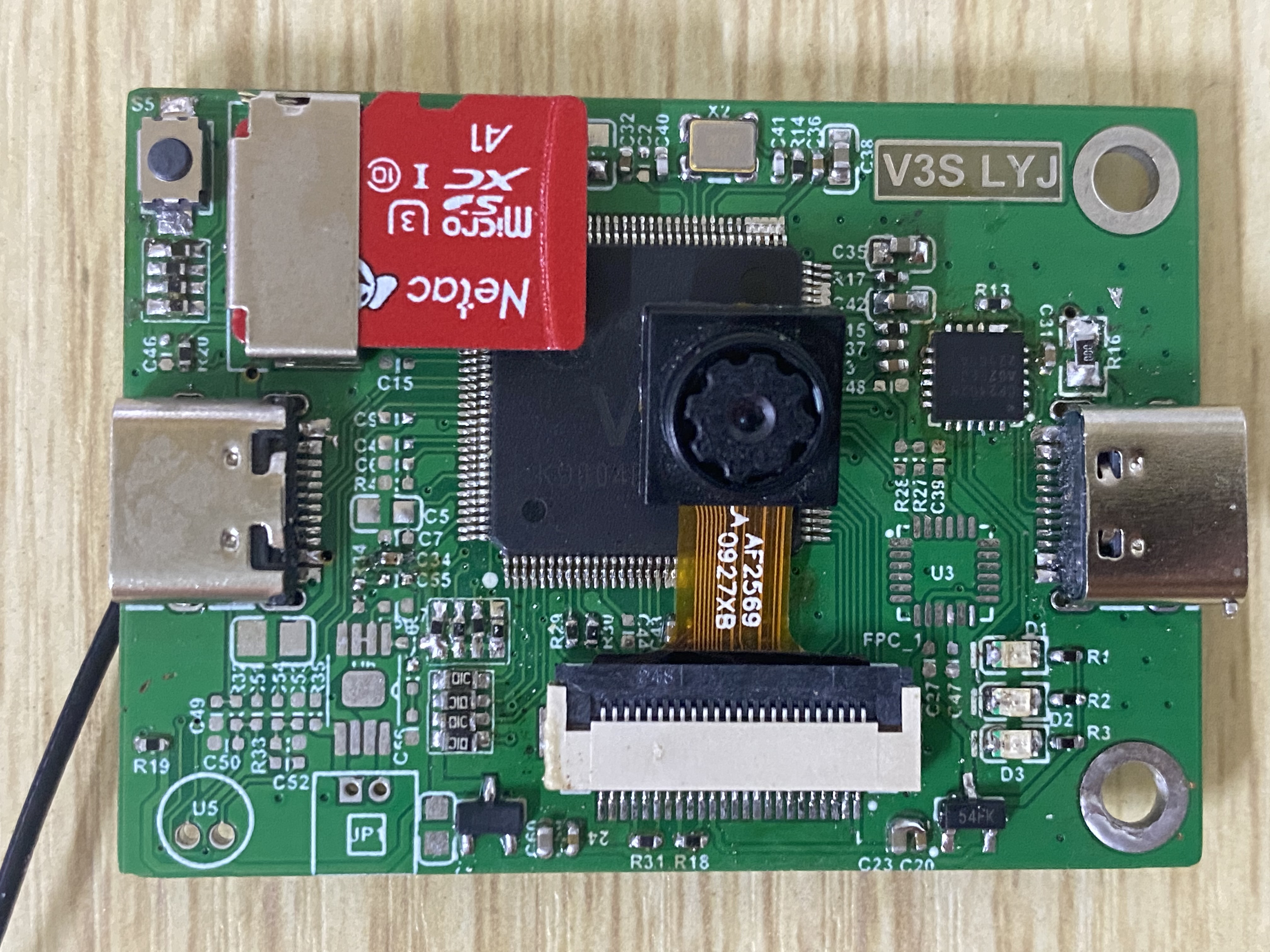
今天,就着摄像头的调试,从嵌入式工程师的角度,介绍如何从无到有,一步一步地调出一款设备。 摄像头型号:OV2640 开发步骤分为 2 个阶段 5 个步骤 阶段一: 设备树、驱动、硬件 阶段二: 应用程序、测试 Step 1:设备树a) 摄像头用到了 I2C 和 CSI 接口,所以要在 pinctrl 节点中添加这两种接口的引脚定义,其中 I2C 使用的是 I2C1 b) 添加 CSI 节点 arch/arm/boot/dts/sun8i-v3s.dtsi pio: pinctrl@1c20800 { i2c1_pins: i2c1-pins { pins = "PE21", "PE22"; function = "i2c1"; }; //omit-if-no-ref csi1_mclk_pin: csi1-mclk-pin { pins = "PE1"; function = "csi"; }; csi1_clk: csi1-clk@0 { pins = "PE0","PE2","PE3"; bias-disable; function = "csi"; }; csi1_8bit: csi1-8bit@0 { pins = "PE6","PE7","PE8","PE9","PE10","PE11","PE12","PE13","PE14","PE15"; bias-disable; function = "csi"; }; } soc { csi1: csi@1cb4000 { compatible = "allwinner,sun8i-v3s-csi"; reg = ; interrupts = ; clocks = , , ; clock-names = "bus", "mod", "ram"; resets = ; status = "okay"; }; };c) 使能 I2C 和 CSI 节点 arch/arm/boot/dts/sun8i-v3s-licheepi-zero-dock.dts &i2c1 { pinctrl-0 = ; pinctrl-names = "default"; clock-frequency = ; status = "okay"; ov2640: camera@30 { compatible = "ovti,ov2640"; reg = ; pinctrl-names = "default"; pinctrl-0 = ; clocks = ; clock-names = "xvclk"; assigned-clocks = ; assigned-clock-rates = ; port { ov2640_0: endpoint { remote-endpoint = ; bus-width = ; }; }; }; }; &csi1 { status = "okay"; pinctrl-names = "default"; pinctrl-0 = ; port { csi1_ep: endpoint { remote-endpoint = ; hsync-active = ; vsync-active = ; bus-width = ; pclk-sample = ; }; }; }; Step 2:驱动使能内核编译选项 > Device Drivers > Multimedia support > I2C Encoders, decoders, sensors and other helper chips OmniVision OV2640 sensor support 注意: 要先禁用 > Device Drivers > Multimedia support [ ] Autoselect ancillary drivers (tuners, sensors, i2c, spi, frontends) 不然无法显示 I2C Encoders, decoders, sensors and other helper chips 选项 Step 3:硬件焊接 24P FPC 翻盖下接排线连接器 焊接 2.8V LDO、1.5V LDO 焊接电阻电容 需要用到 i2c-tools、ffmped、fswebcam 在 buildroot Target Packets 中添加 Step 5:测试 step 5.1:I2C 测试先用 I2C 工具检测摄像头的 I2C 信息 # i2cdetect -y 1 0 1 2 3 4 5 6 7 8 9 a b c d e f 00: -- -- -- -- -- -- -- -- 10: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- 20: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- 30: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- 40: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- 50: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- 60: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- 70: -- -- -- -- -- -- -- -- #没有检测到 I2C 设备,SOC 测 I2C 软件是好的,因为 /dev/i2c-1 设备已产生,并且使用 I2C 工具操作 I2C 控制器也没报错, 所以,可能出现问题的节点 a) SOC I2C 引脚没有输出 I2C 信号 b) 摄像头 I2C 引脚没有收到 I2C 信号 c) 摄像头收到 I2C 信号,但是没有做出响应 d) 摄像头 I2C 做出响应,但是 SOC 解析失败 排查 a) 使用逻辑分析仪抓 SOC I2C 引脚信号,发现 SOC 正常发出 I2C 信号,遍历地址 0~0x77 的设备,但是没有收到任何一个响应 b) 使用万用表量摄像头 I2C 引脚到 SOC I2C 引脚的通断,导通,没问题 c) 从上述两点,可知问题原因是:摄像头收到 I2C 信号,但是没有做出响应 继续排查 c1) 检查摄像头供电,使用万用表测量,电源电压正常 c2) 难道是摄像头坏了?遂将 OV2640 插在 ESP32-CAM 板子上进行测试,可以正常摄像,所以摄像头是好的 c3) dmesg 显示 [ 1.158234] i2c /dev entries driver [ 1.162410] sun8i-v3s-pinctrl 1c20800.pinctrl: 1c20800.pinctrl supply vcc-pe not found, using dummy regulator [ 1.175129] ov2640 0-0030: Product ID error fa:fa难道是 vcc-pe 引脚没有电压? 使用万用表测量,发现电压正常 网上搜索该问题,发现可以正常检测到 I2C 的内核 log 中也有该警告,所以应该不是该问题导致 c4) 网上搜到一篇文章《camera调试:i2c不通如何排查?》,介绍了排查 I2C 地址、引脚、供电、reset 引脚、powdn 引脚、上电时序、MCLK 等步骤,我跟着流程依次检查,最后看到 MCLK 时灵光乍现,依稀记得设备树中有配置 MCLK 参数的地方 ov2640: camera@30 { compatible = "ovti,ov2640"; reg = ; pinctrl-names = "default"; pinctrl-0 = ; clocks = ; clock-names = "xvclk"; assigned-clocks = ; // 这两行 assigned-clock-rates = ; // 这两行 port { ov2640_0: endpoint { remote-endpoint = ; bus-width = ; }; }; };这份节点参数我是从网上找的,一般 V3S 的晶振使用的是 24MHz 的,而我使用的是 26MHz 的,问题应是这里,改成 26000000,重新测试 [ 1.158263] i2c /dev entries driver [ 1.163342] sun8i-v3s-pinctrl 1c20800.pinctrl: 1c20800.pinctrl supply vcc-pe not found, using dummy regulator [ 1.176419] ov2640 1-0030: ov2640 Product ID 26:42 Manufacturer ID 7f:a2 [ 1.183768] i2c i2c-1: OV2640 Probed # i2cdetect -y 1 0 1 2 3 4 5 6 7 8 9 a b c d e f 00: -- -- -- -- -- -- -- -- 10: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- 20: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- 30: UU -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- 40: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- 50: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- 60: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- 70: -- -- -- -- -- -- -- --可以检测到摄像头 I2C 设备了。 step 5.2:拍照测试 fswebcam -S 20 -d /dev/video0 -p UYVY -r 800x600 --dumpframe dump.bin fswebcam.jpg发现没有 /dev/video0 设备 在网上搜了下产生 /dev/video0 设备的内核编译选项,如下图,需要使能 Allwinner V3s Camera Sensor Interface driver 拍照测试 fswebcam -S 20 -d /dev/video0 -p UYVY -r 800x600 --dumpframe dump.bin fswebcam.jpg
可以看到,上面拍摄的照片和视频有一道道的横纹,网上搜索发现许多人都遇到了这个问题,基本明确问题原因是电源纹波导致,我尝试换了几颗电源滤波电容,还是没能消除横纹,这个硬件问题后面随缘去解吧,缩短布线是个有效的措施。 至此,摄像头调试,功能部分已 OK,性能调优 TO BE DONE(一般再也不 DONE。。。)。 |
 测量短路、测量电压、确认外设好坏
测量短路、测量电压、确认外设好坏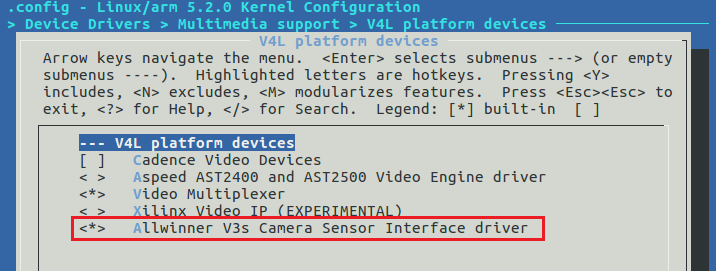 可是我发现我的 buildroot 中 V4L platform devices 下面并没有该选项 最终,通过在源码的 Kconfig 文件中搜索 Allwinner V3s
可是我发现我的 buildroot 中 V4L platform devices 下面并没有该选项 最终,通过在源码的 Kconfig 文件中搜索 Allwinner V3s 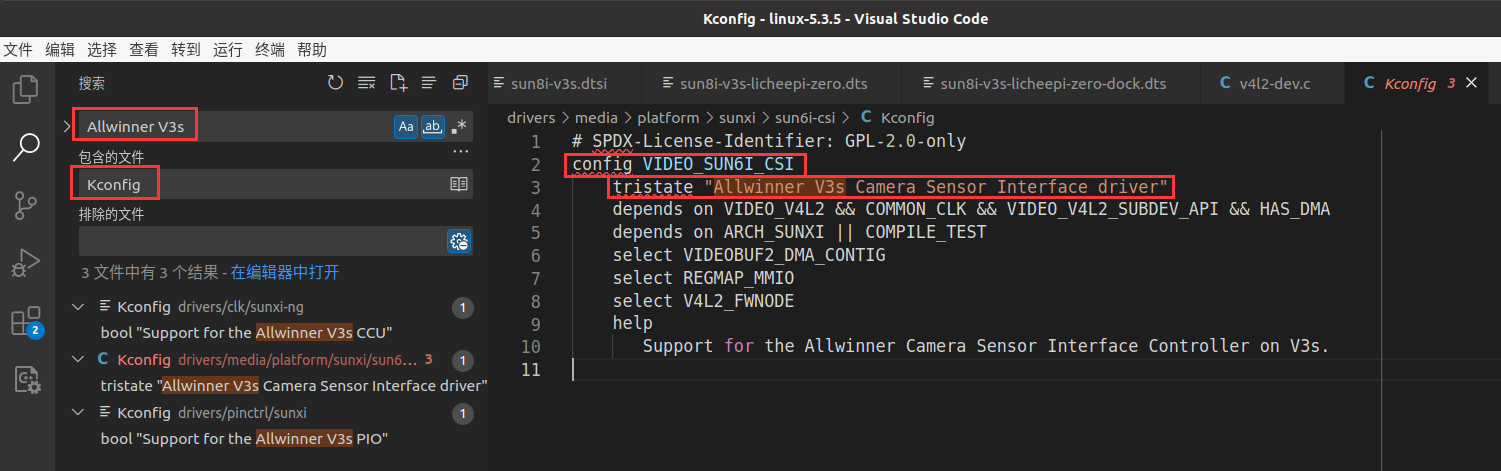 再跟着关键字 VIDEO_SUN6I_CSI,在 menuconfig 中一步步搜索,将依赖的编译选项都使能后,终于该选项出现了。使能后,/dev/video0 设备就出现了
再跟着关键字 VIDEO_SUN6I_CSI,在 menuconfig 中一步步搜索,将依赖的编译选项都使能后,终于该选项出现了。使能后,/dev/video0 设备就出现了 录像测试
录像测试
【本文地址】
今日新闻 |
推荐新闻 |