【基础】自动驾驶控制算法第二讲 三个坐标系与运动学方程 |
您所在的位置:网站首页 › 忠厚老实的老王自动驾驶控制算法笔记 › 【基础】自动驾驶控制算法第二讲 三个坐标系与运动学方程 |
【基础】自动驾驶控制算法第二讲 三个坐标系与运动学方程
|
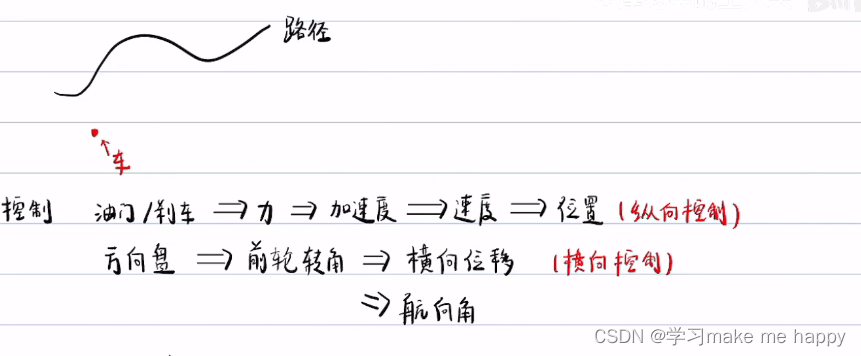
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档 文章目录 前言三种控制算法控制基本原理三个坐标系绝对坐标系/大地坐标系车身坐标系自然坐标系/Frenet坐标系(可解耦)本教程采用右手系自行车模型的假设航向角怎么来的瞬心法确定质心的速度 运动学模型推导二、使用步骤1.引入库2.读入数据 总结 前言提示:这里可以添加本文要记录的大概内容: 例如:随着人工智能的不断发展,机器学习这门技术也越来越重要,很多人都开启了学习机器学习,本文就介绍了机器学习的基础内容。 提示:以下是本篇文章正文内容,下面案例可供参考 三种控制算法 PIDLQRMPC 量产实车,一般为PID+LQR MPC 多在学术 控制基本原理
具体参看老王的视频 自行车模型的假设 完全对称轮距相对运动轨迹忽略不计轮胎是刚性的=轮胎没侧偏 航向角怎么来的 瞬心法确定质心的速度瞬心法属于理论力学的知识,为此我还专门去复习过高中的题。 要区分一下几个角度 横摆角侧偏角航向角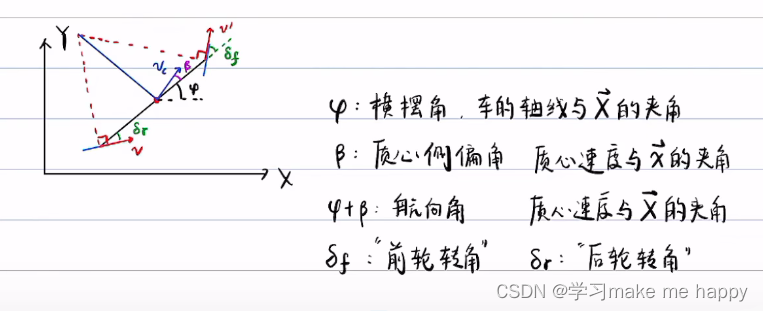 有的自行车模型考虑轮胎变形,有的自行车不考虑轮胎变形。 有的自行车模型考虑轮胎变形,有的自行车不考虑轮胎变形。
又来了个这个,后面看看有啥用。 容易得到如下的公式, 代码如下(示例): import numpy as np import pandas as pd import matplotlib.pyplot as plt import seaborn as sns import warnings warnings.filterwarnings('ignore') import ssl ssl._create_default_https_context = ssl._create_unverified_context 2.读入数据代码如下(示例): data = pd.read_csv( 'https://labfile.oss.aliyuncs.com/courses/1283/adult.data.csv') print(data.head())该处使用的url网络请求的数据。 总结提示:这里对文章进行总结: 例如:以上就是今天要讲的内容,本文仅仅简单介绍了pandas的使用,而pandas提供了大量能使我们快速便捷地处理数据的函数和方法。 |
 直觉上,横向控制 和 纵向控制是耦合的,但是自然坐标系下,可以做到横纵向的解耦。
直觉上,横向控制 和 纵向控制是耦合的,但是自然坐标系下,可以做到横纵向的解耦。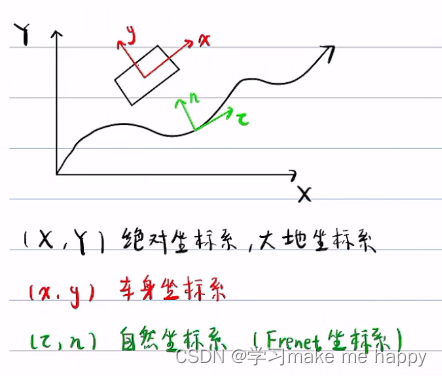
 建立微分方程,微分方程研究的是deltaf怎么影响测量位移和航向角的。分为运动学模型(几何关系)和动力学模型(根据牛顿力学建立)。 运动学不考虑轮胎的变形,只适用于轨迹较平滑,转弯半径比较大,速度比较低的情形。
建立微分方程,微分方程研究的是deltaf怎么影响测量位移和航向角的。分为运动学模型(几何关系)和动力学模型(根据牛顿力学建立)。 运动学不考虑轮胎的变形,只适用于轨迹较平滑,转弯半径比较大,速度比较低的情形。 这里面没有deltaf啊,所以又使用正弦定理,把R用deltaf来表示。
这里面没有deltaf啊,所以又使用正弦定理,把R用deltaf来表示。 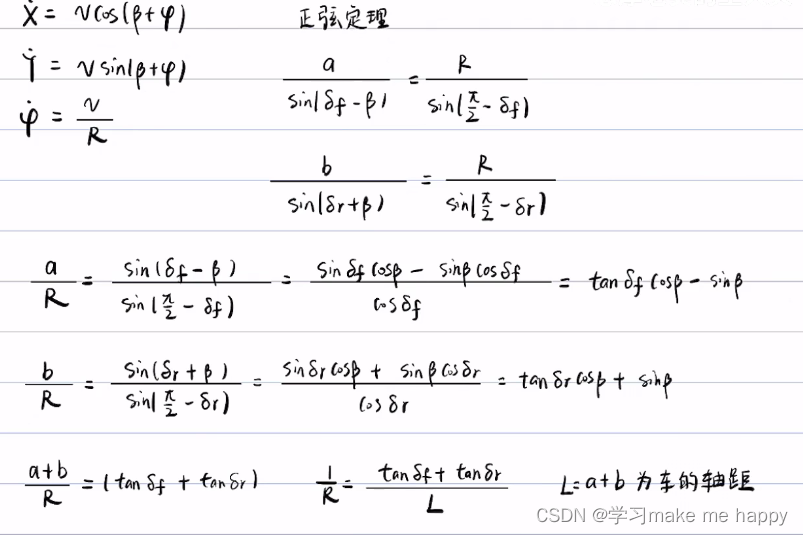 注意,上面有个错误。 最后得到的运动学方程,以及低俗条件下可以做的简化。
注意,上面有个错误。 最后得到的运动学方程,以及低俗条件下可以做的简化。 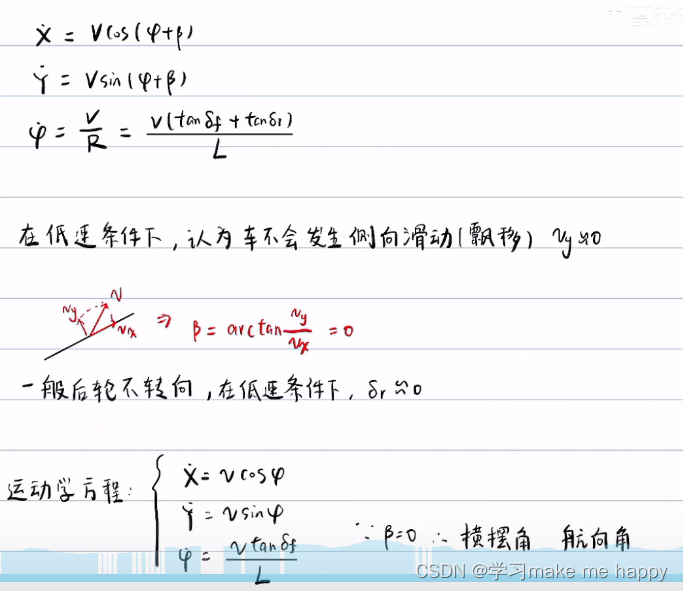
【本文地址】