机器智能 |
您所在的位置:网站首页 › 归一化条件 › 机器智能 |
机器智能
|
先验概率和后验概率就不说了,直接进入归一化正题: 1、归一化:a、目标:给定条件变量E的值e,计算查询变量Y的后验联合分布P(Y|E=e). b、步骤: ①、确定隐藏变量H=X-E-Y,其中X是变量总集 条件概率=联合概率*规划因子,规划因子的值为1/P(E=e) ②、 a、命题a和b之间的独立性可以写作:即a不影响b的发生,b也不影响a的发生 a、举例: a、联合概率规则:a和b同时发生的概率是b发生的概率x在b条件下a发生的概率 一个机器人通过摄像头来评估门的状态。门只能处于两种状态中:“开门”和“关门”。初始时,机器人不知道门处于何种状态之中,因此赋予”开门”和”关门”两种状态同样的先验概率值: P(is_open)=0.5 P(is_close)=0.5 进一步假设机器人的摄像头传感器是有噪音的,这些噪音导致了对于开门,关门状态判断的不准确,产生了如下的条件概率: P(sensor_open|is_open)=0.6, P(sensor_closed|is_open)=0.4 P(sensor_open|is_closed)=0.2, P(sensor_closed|is_ closed)=0.8 这些条件概率反映出了机器人在判断关门状态时相对比较可靠(错误率只有0.2),而对于开门状态的判断,错误率相对比较高(错误率为0.4) ①、假定当前机器人探测到门处于“开门”状态,使用贝叶斯规则来计算开门与关门两种状态的后验概率。注意:必须列出公式,只有答案没有过程不得分。 解:这道题考察了贝叶斯公式的运用和归一化的运用。 我们要求的是P(is_open|sensor_open)和P(is_closed|sensor_open) 根据贝叶斯公式可以得到两个的结果分别是0.3α和0.1α,由于这两个概率相互独立并且概率和应该为1(即条件独立性),所以得到两个概率值分别为0.75和0.25 ②、为了避免机器人判断错误而导致的对门的撞击,机器人必须提高对于门的状态的判断准确率。具体来说,我们要求机器人对于门状态的判断准确率达到95%以上。假定机器人连续探求k次并得到门处于“开门”状态,那么k最小为多少才能保证机器人对于“开门”状态的判断准确率达到95%以上?假定每次机器人对于门状态的判断是独立的。 解:这道题实际上很好解决,在上文我们求得了P(is_closed|sensor_open)的值是0.25,而我们的提高准确率的方法时进行多次探测,只要有1次为开门就会判断为当前的状态是“开门”。 也就是说,机器人判断“开门”状态为“关门”的情况是连续k次判断为“关门”,即(P(is_closed|sensor_open))k,这是判断错误的情况,如果我们想要得到正确率达到95%以上的条件是(P(is_closed|sensor_open))k<5%,由此可以得到不等式 (0.25)k<5% 得到k>2 所以K的最小值为3 |
 c、条件变量(这里是E),查询变量(要得到的变量,这里是Y),隐藏变量(这里的H,是所有变量-查询变量-条件变量) d、两个变量的联合概率=对第三个变量的概率的枚举求和。 e、由于直接求出来的概率之和不唯一,故加上α参数,用来使概率和为1 f、举例
c、条件变量(这里是E),查询变量(要得到的变量,这里是Y),隐藏变量(这里的H,是所有变量-查询变量-条件变量) d、两个变量的联合概率=对第三个变量的概率的枚举求和。 e、由于直接求出来的概率之和不唯一,故加上α参数,用来使概率和为1 f、举例 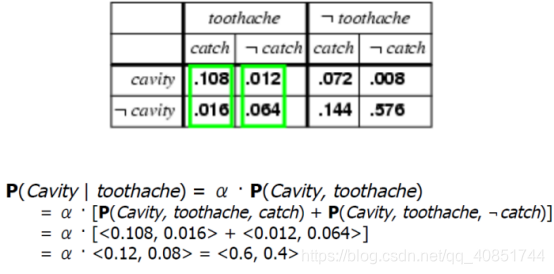
 b、对于n个独立的变量,其复杂度O(2n)->O(n)
b、对于n个独立的变量,其复杂度O(2n)->O(n)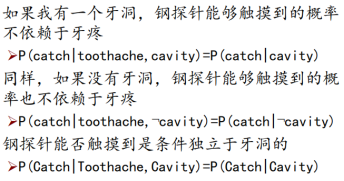 使用链式规则和条件独立性来变换完全联合分布的公式:
使用链式规则和条件独立性来变换完全联合分布的公式:  b、应用条件独立性能够将完全联合分布的公式从指数级的项数降到接近线性级 c、条件独立性是依赖于我们从环境中的知识得到 d、就是证明两个条件概率是相互独立的
b、应用条件独立性能够将完全联合分布的公式从指数级的项数降到接近线性级 c、条件独立性是依赖于我们从环境中的知识得到 d、就是证明两个条件概率是相互独立的 b、贝叶斯规则:b条件下a发生的概率是a条件下b发生的概率a发生的概率/b发生的概率
b、贝叶斯规则:b条件下a发生的概率是a条件下b发生的概率a发生的概率/b发生的概率  可以理解为:a和b同时发生的概率是a条件下b发生的概率a发生的概率;然后b条件下a发生的概率是a和b同时发生的概率/b发生的概率 c、利用条件独立性和贝叶斯规则简化问题 d、朴素贝叶斯
可以理解为:a和b同时发生的概率是a条件下b发生的概率a发生的概率;然后b条件下a发生的概率是a和b同时发生的概率/b发生的概率 c、利用条件独立性和贝叶斯规则简化问题 d、朴素贝叶斯【本文地址】
今日新闻 |
推荐新闻 |