库卡机器人profinet连接说明(西门子PLC部分) |
您所在的位置:网站首页 › 库卡机器人与焊机通讯配置 › 库卡机器人profinet连接说明(西门子PLC部分) |
库卡机器人profinet连接说明(西门子PLC部分)
|
开始前准备: 硬件: 带有Profinet通讯协议PLC(本文选用西门子PLC)、普通交换机(用于测试数据)、电脑及机器人; 软件: 博图、workvisual 开始配置: 1、查看机器人Profinet选项的版本及PLC的CPU型号 机器人profinet选项版本
PLC的CPU型号 
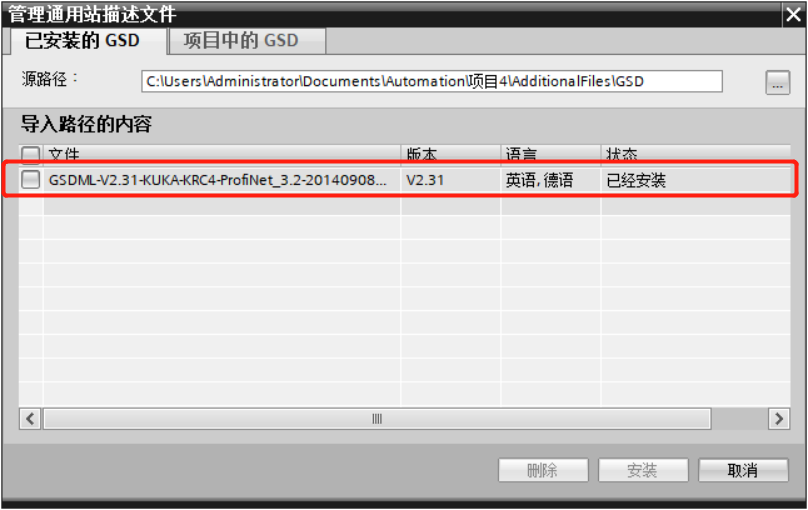
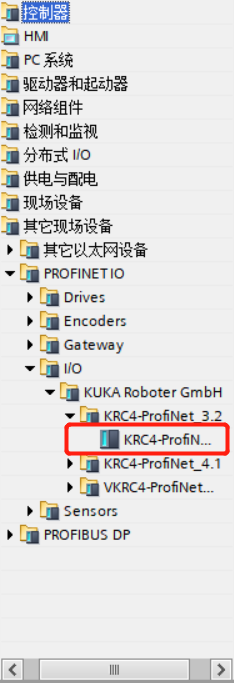
观察好对应版本后进行对应版本的文件配置 2、进行PLC软件配置 1. 打开博图软件,点击选项-管理通用站描述文件 如果没有像图中GSD文件就安装Workvisual软件,并打开安装路径中config文件C:\Program Files (x86)\KUKA\WorkVisual 5.0\DeviceDescriptions\GSDML 选择自己需要的GSD文件版本并进行安装; 2.打开设备和网络并将右侧的设备添加在网络中
就将机器人和KUKA机器人的通讯进行了连接,后面来设置KUKA机器人的配置 
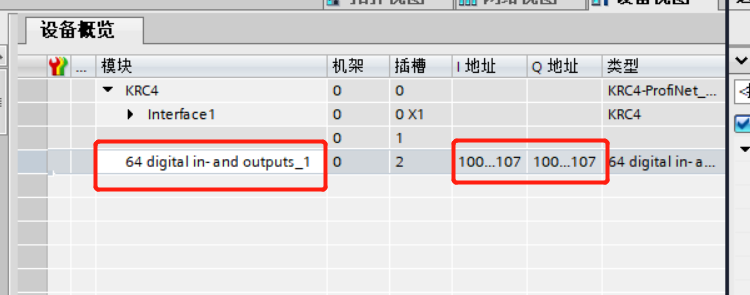
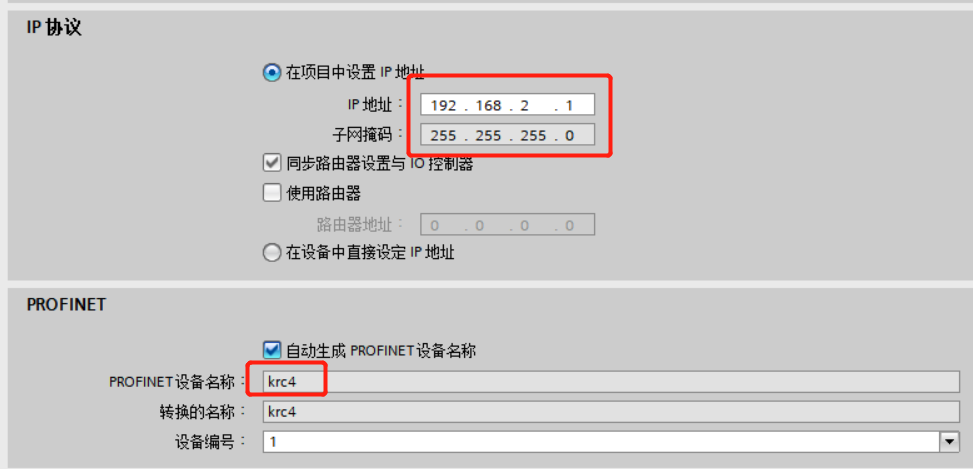
删除多余的信号配置如一开始256个字节和64个安全配置信号,添加如一开头库卡workvisual中profinet配置文件中的字节信号,如上图所示,并配置输入输出的地址起始字节(此地址不必对应workvisual上配置地址); 3、配置库卡模块的通讯地址和通讯名称

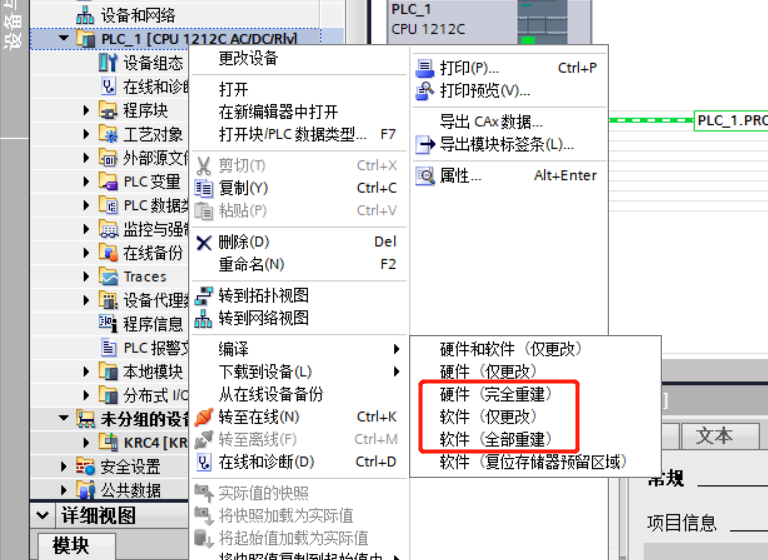
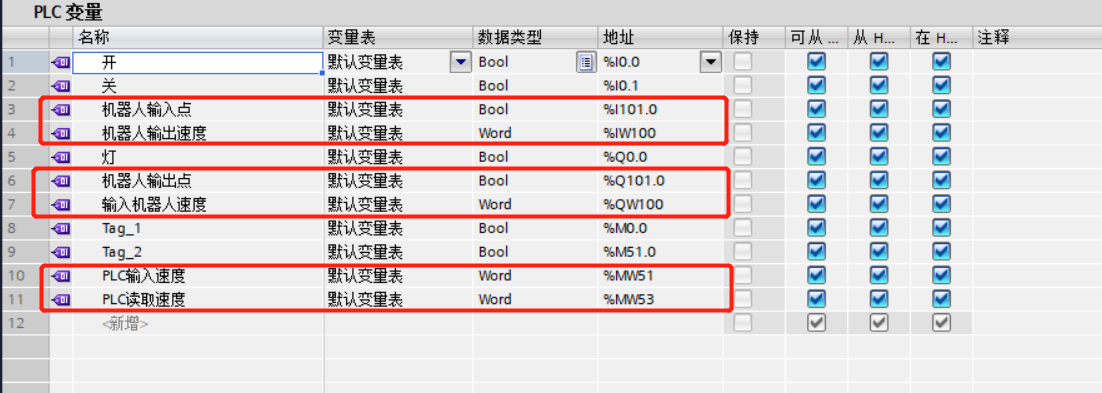
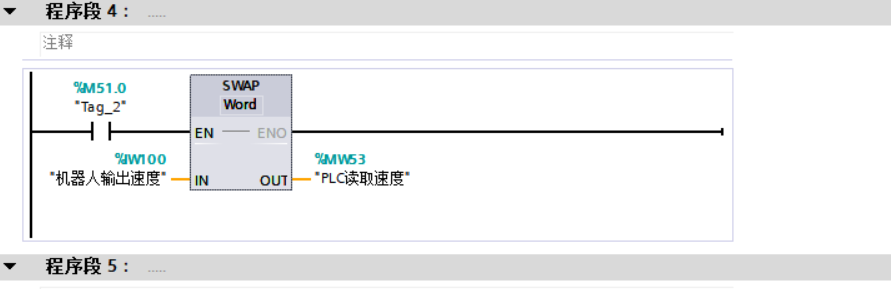
此名称需要和workvisual上的profinet的配置一致,地址和示教器中网络配置的KLI网口配置一致即可联机; 4、PLC的Profinet配置及信号地址要求 PLC开始配置之前最好进行软件和硬件的重建,防止后续出现各种报错出现 PLC变量最好进行提前设置,设置的时候注意好机器人的地址 其中BOOL量的地址对应之前库卡模块的地址,组信号我这边用的是一个字的大小,对应16个byte最大输出值为65536,传输数据需要进行SWAP转换
其中SWAP指令是8个字节的转换,比如0011 1100 1110 1110 转换后 1110 1110 0011 1100,读取库卡16位的需要进行转换,8位的不用转换,直接用MOVE直接传 程序写好后直接上传就可以了 |



【本文地址】
今日新闻 |
推荐新闻 |