KUKA工业机器人搬运编程与操作(中) |
您所在的位置:网站首页 › 库卡PTP指令怎么改速度 › KUKA工业机器人搬运编程与操作(中) |
KUKA工业机器人搬运编程与操作(中)
|
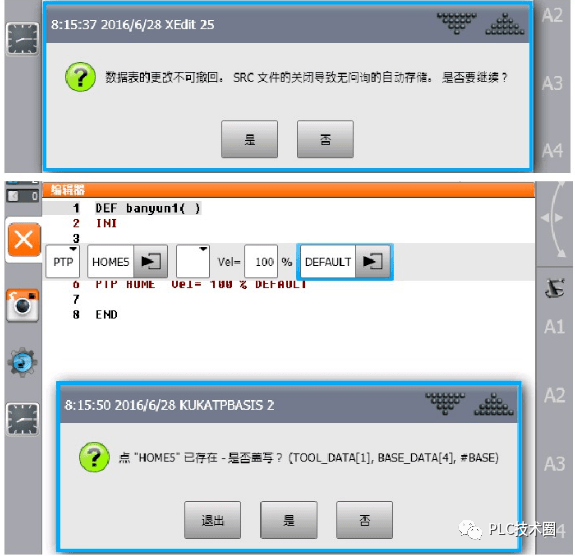
点击示教器界面右下角【OK】软键, 弹出对话框, 点击【是】接纳坐标系修改, 继续弹出对话框, 点击【是】采用此点作为HOME5点, 同时完成第4行PTP命令的修改。同样地, 将默认的第6行命令中HOME点
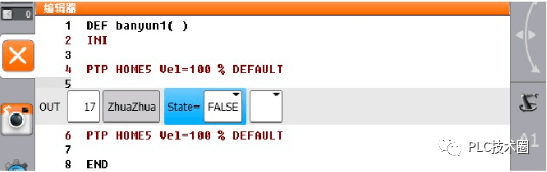
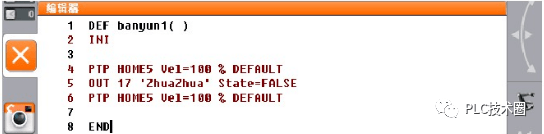
(3)示教1/0:气爪打开 将光标选择在第5行, 点击示教界面左下角【指令】软键, 相继选择【逻辑】→【OUT】→OUT指令, 弹出OUT联机表格。将输出端编号改为17, 输出接通状态改为FALSE, 取消CONT, 完成OUT命令参数设置, 点击示教界面右下角【OK】软键。同时, 再次将光标选择在第5行, 点击示教界面右下角【编辑】软键, 选择【删除】将第5行空行删除。
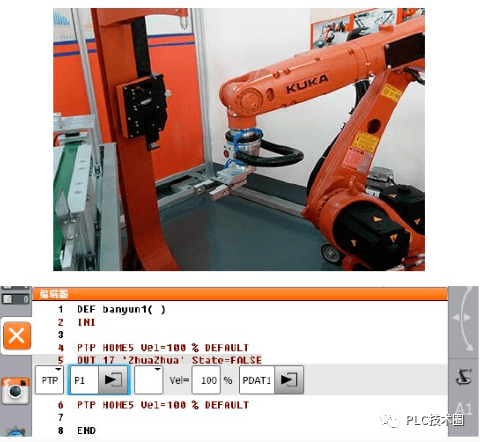
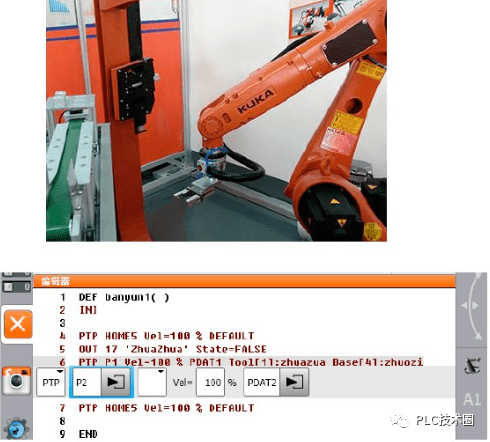
(4 )示教:P1点 手动操作机器人移动到Pl点, 将光标移至第5行,点击示教界面左下角【指令】→【运动】→【PTP】,添加指令PTP示教界面右下角【OK】软键完成P1点示教
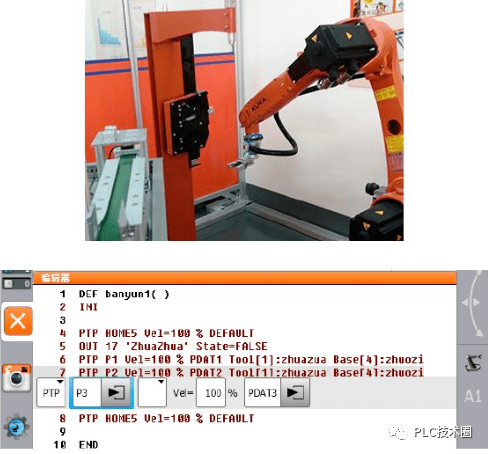
(5 )示教:P2点 手动操作机器人移动到P2 点, 将光标移至第6行,点击示教界面下边【上一条指令】,继续点击添加指令PTP,点击示教界面右下角【OK】软键完成P2点示教
(6 )示教:P3点 手动操作机器人移动到P3 点, 将光标移至第7行,点击示教界面下边上一条指令继续添加指令PTP,点击示教界面右下角【OK】软键完成P3点示教
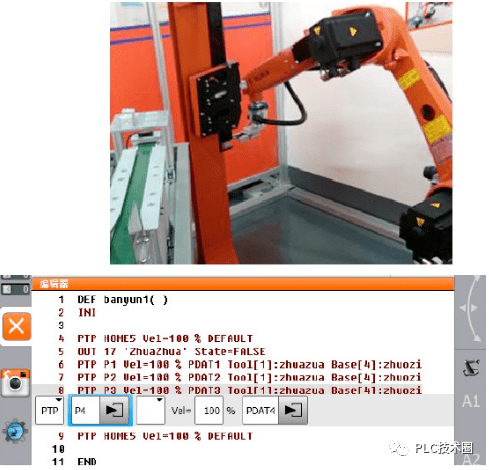
(7 )示教:P4点 手动操作机器人移动到P4点, 将光标移至第8行, 点击示教界面下边【上 条指令】, 继续添加指令PTP,点击示教界面右下角【OK】软键完成P4点示教。
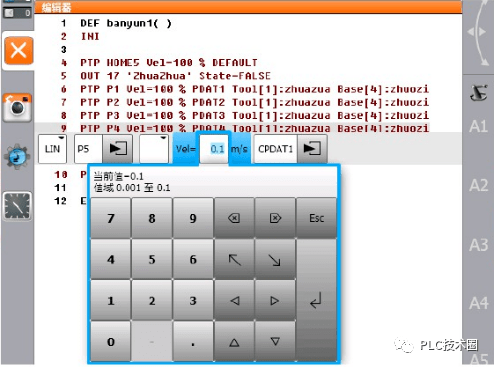
(8)示教:P5点 手动操作机器人移动到P5点, 将光标移至第9行, 点击示教界面左下角【指令】→【运动】→【LIN】, 添加指令LIN,修改速度为0.1m/s,点击示教界面右下角【OK】软键完成P5点示教
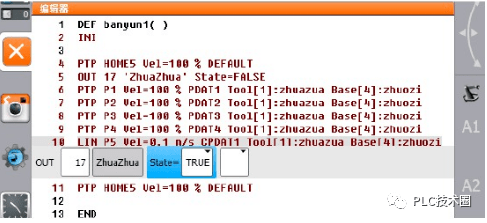
(9)示教1/0:气爪抓紧 将光标选择在第10行, 点击示教界面左下角【指令】软键, 相继选择【逻辑】→【OUT】→OUT指令, 输出端编号默认为17,输出接通状态改为TRUE, 点击右下角【OK】完成OUT命令参数设置
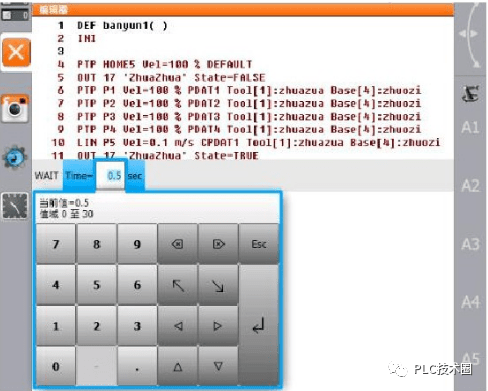
(10)示教等待 为使得气爪可靠夹紧工件,在此设置等待时间0.5s。将光标选择在第11行,点击【指令】→【逻辑】→【WAIT】,设置时间参数,点击右下角【OK】完成等待示教
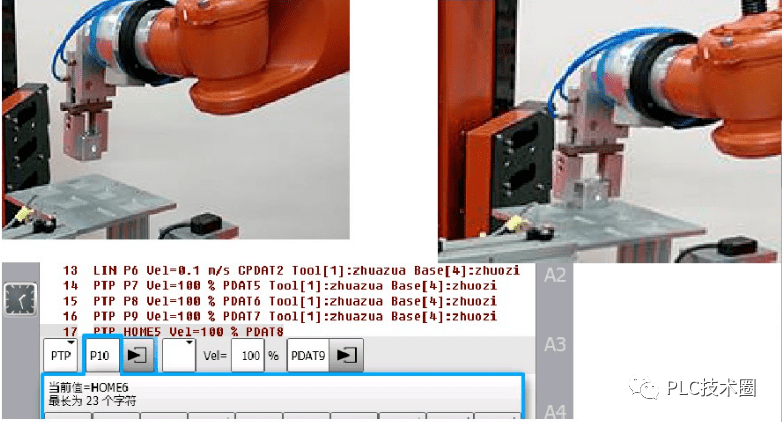
(11 )示教:P6点、 P7点、 P8点、 p9点、 HOME 参照P4点, 用 LIN命令示教P6点:分别参照P3点、 P2点、 Pl点, 用PTP命令分别示教P7点、 P8点、 pg点;用PTP命令回归HOME点所示, 完成机器人从卸料区抓取工件过程。 (12 )示教:P10点 手动操作机器人移动到P10点, 将光标移至第16行, 点击示教界面左下角【指令】→【运动】→【PTP】,添加指令PTP,点击示教界面右下面角【OK】软键完成P10点示教
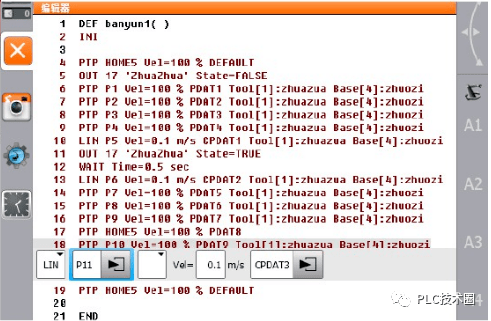
(13 )示教:P11点 手动操作机器人移动到P11点,将光标移至第18行, 点击示教界面左下角【指令】→【运动】→【LIN】,添加指令LIN,修改速度为0.1m/s,点击示教界面右下面角【OK】软键完成P11点示教
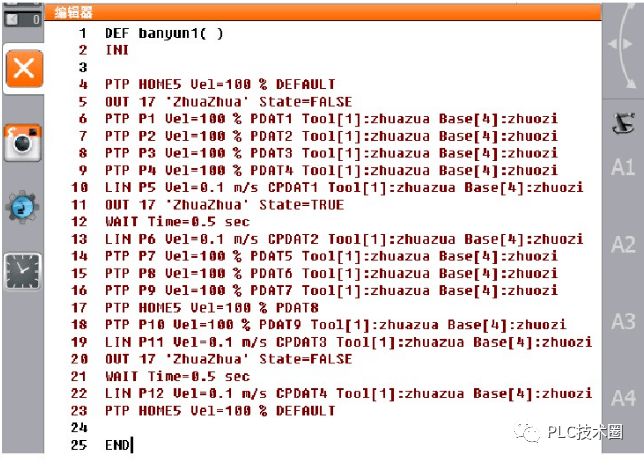
(14)示教1/0:气爪打开 添加OUT指令, 将气爪打开, 工件放置于堆垛区指定地点 (15)示教等待 为确保气爪可靠打开, 添加WAIT延时指令。 (16)示教:P12点, HOME 参照P10点, 用 LIN命令示教P12点:用 PTP命令回归HOME点, 完成机器人从堆垛区放置工件过程, 完成搬运任务。 示教完成之后, 参考程序如图所示。
待续。。。请看下一篇返回搜狐,查看更多 |
【本文地址】
今日新闻 |
推荐新闻 |