ABB工业机器人速度控制指令数据 |
您所在的位置:网站首页 › 工业机器人move指令代码 › ABB工业机器人速度控制指令数据 |
ABB工业机器人速度控制指令数据
|
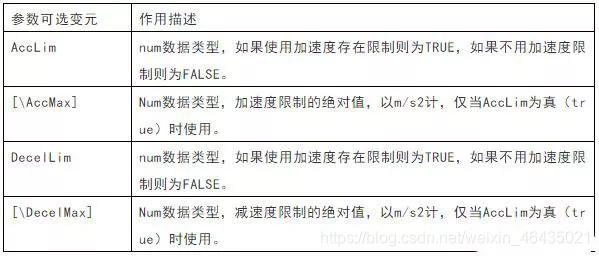
ABB机器人运动过程当中,需要适当控制移动指令速度,打到生产需要的的实际速度,有助于更好让机器人代替人工生产,机器人更具有柔性。这里主要了解ABB机器人的加速度控制指令PathAccLim和速度程序数据类型speeddata。 一、速控控制指令:PathAccLim 1、使用说明 PathAccLim(Path Acceleration Limitation)是降低路径沿线的TCP加速度指令,用于设置或重置沿运动路径的TCP加速度和/或减速度限值。将沿运动路径(即路径坐标系中的加速度)实施限制。路径方向中的正切加速度/减速度将会受到限制。本指令未限制设备的总加速度,即世界坐标系中的加速度,因此,其无法直接用于保护设备,以免出现较大的加速度。本指令仅可用于主任务T_ROB1,或者如果在MultiMove系统中,则可用于运动任务中。 2、参数:PathAccLim AccLim [\AccMax] DecelLim [\DecelMax] 参数可选变元 (2)如果将参数\AccMax或\DecelMax设置为一个过低的值,则将系统变量ERRNO设置为ERR_ACC_TOO_LOW。随后,可用错误处理器对该错误进行处理。 (3)加速度/减速度限制适用于下一个执行机械臂运动的命令,其后对运动指令始终有效,直至执行新的PathAccLim指令设定新的值。 (4)自动设置最大加速度/减速度(PathAccLim FALSE, FALSE),即不使用设定的情况,当使用重启模式重置RAPID时,加载新的程序时和当从起点开始执行程序时设定为默认状态。 (5)如果存在指令AccSet和PathAccLim的组合,则系统以下列顺序降低加速度/减速度:先根据AccSet限制,再根据PathAccLim进行限制。 4、举例使用 (1)程序及其注释 速度控制程序: PROC rPathAcc1() AccSet 100, 100; rSJX1; !第一次画三角形用默认值加减速度,AccSet指令控制 WaitTime 3; AccSet 50, 100; rSJX1; !第二画三角形使用50%加减速度,AccSet指令控制 AccSet 100, 100; WaitTime 3; PathAccLim TRUE\AccMax:=50, TRUE\DecelMax:=50; rSJX1; !第三次画三角形使用加减速度50%,PathAccLim指令控制。 WaitTime 3; PathAccLim FALSE, FALSE; ENDPROC 三角形程序: PROC rSJX1() MoveJ Offs(pSJX10,0,0,100), v1500, z50, tool1; MoveL pSJX10, v1000, fine, tool1; MoveL Offs(pSJX10,200,0,0), v1000, fine, tool1; MoveL Offs(pSJX10,0,300,0), v1000, fine, tool1; MoveL pSJX10, v1000, fine, tool1; MoveL Offs(pSJX10,0,0,100), v1500, z50, tool1; ENDPROC 程序运行说明:可以运行程序,观察三次画三角形移动指令过程进行比较,看不同指令对同一个画三角形的不同加减速度,这里在真实机器人上面观看效果更佳。一般对于用机器人来搬运比较容易倒出去的产品货物可以使用pathacclim更好,效果更佳平稳,例如用机器人搬运水杯,水杯当中的水不会因为机器人加减速度过程让水溢出。 (2)仿真图片: 2、参数:speeddata [v_tcp,v_ori,v_leax,v_reax] !如果有外部轴,外轴线性运动速度1500mm/s,旋转速度30度/秒; CONST speeddata speedVmin:=[800,20,600,20]; !移动指令TCP的线性运动速度800mm/s,tool1重定位速度20Degrees/s; !如果有外部轴,外轴线性运动速度600mm/s,旋转速度20度/秒; (2)四边形程序部分: PROC rSBX1() MoveJ Offs(pSBX10,0,0,100), speedVmax, z50, tool1; MoveL pSBX10, speedVmin, fine, tool1; MoveL Offs(pSBX10,200,0,0), speedVmin, fine, tool1; MoveL Offs(pSBX10,200,300,0), speedVmin, fine, tool1; MoveL Offs(pSBX10,0,300,0), speedVmin, fine, tool1; MoveL pSBX10, speedVmin, fine, tool1; MoveL Offs(pSBX10,0,0,100), speedVmax, z50, tool1; ENDPROC (3)说明:机器人移动到四边形上方点位Offs(pSBX10,0,0,100)速度为speedVmax,在画四边形过程当中运动速度为 speedVmin。 (4)仿真图片 |
 3、使用限制 (1)容许的最小加速度/减速度为0.1 m/s2。建议使加速度和减速度限制对称,即一般设定AccMax和DecelMax相同的值。
3、使用限制 (1)容许的最小加速度/减速度为0.1 m/s2。建议使加速度和减速度限制对称,即一般设定AccMax和DecelMax相同的值。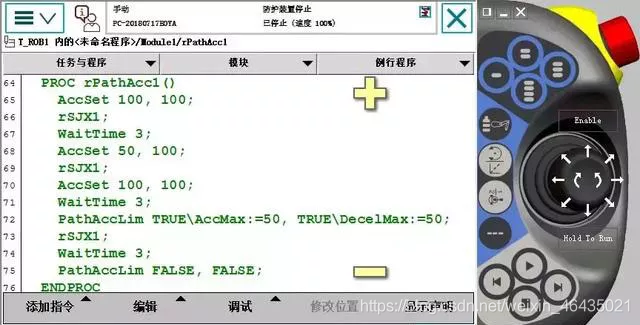 图片2:三角形
图片2:三角形 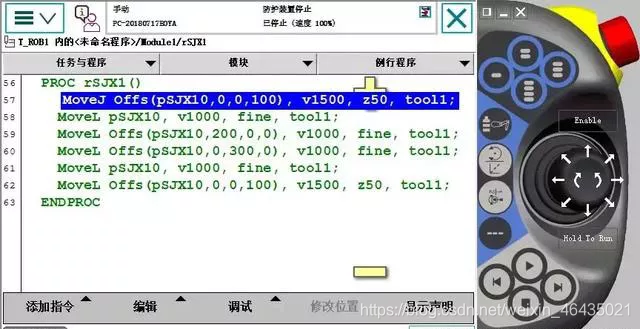 图片3:程序图片
图片3:程序图片 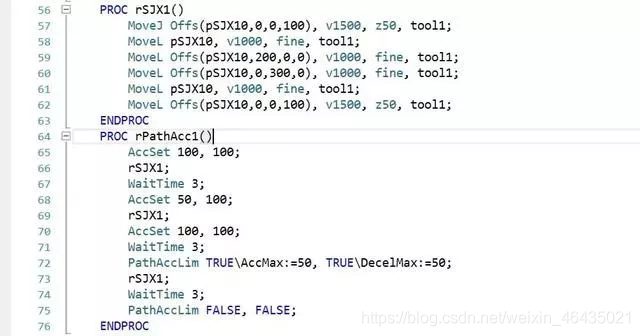 二、速度程序数据类型:speeddata 1、速度控制程序数据类型 speeddata用于规定机器人和外轴均开始移动时的速率,速度数据定义以下速率: • 工具中心点移动时的速率, • 工具的重新定位速度, • 线性或旋转外轴移动时的速率。 当结合多种不同类型的移动时,其中一个速率常常限制所有运动。将减小其他运动的速率,以便所有运动同时停止执行。同时通过机械臂性能来限制速率。将会根据机械臂类型和运动路径而有所不同。
二、速度程序数据类型:speeddata 1、速度控制程序数据类型 speeddata用于规定机器人和外轴均开始移动时的速率,速度数据定义以下速率: • 工具中心点移动时的速率, • 工具的重新定位速度, • 线性或旋转外轴移动时的速率。 当结合多种不同类型的移动时,其中一个速率常常限制所有运动。将减小其他运动的速率,以便所有运动同时停止执行。同时通过机械臂性能来限制速率。将会根据机械臂类型和运动路径而有所不同。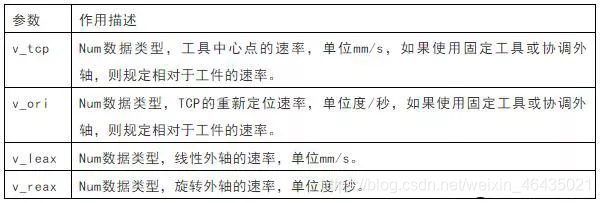 3、举例说明 (1)程序数据数值: CONST speeddata speedVmax:=[2000,30,1500,30]; !移动指令TCP的线性运动速度2000mm/s,tool1重定位速度30度/秒;
3、举例说明 (1)程序数据数值: CONST speeddata speedVmax:=[2000,30,1500,30]; !移动指令TCP的线性运动速度2000mm/s,tool1重定位速度30度/秒;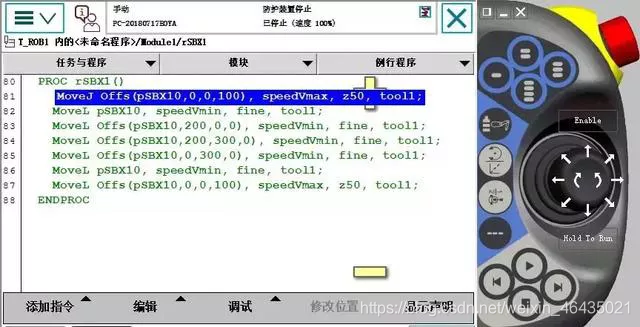 4、系统预定义速度(参考来源ABB指令函数功能) (1)已经在系统中定义了一系列速度数据,用于移动机械臂和外轴的预定义速度数据。
4、系统预定义速度(参考来源ABB指令函数功能) (1)已经在系统中定义了一系列速度数据,用于移动机械臂和外轴的预定义速度数据。 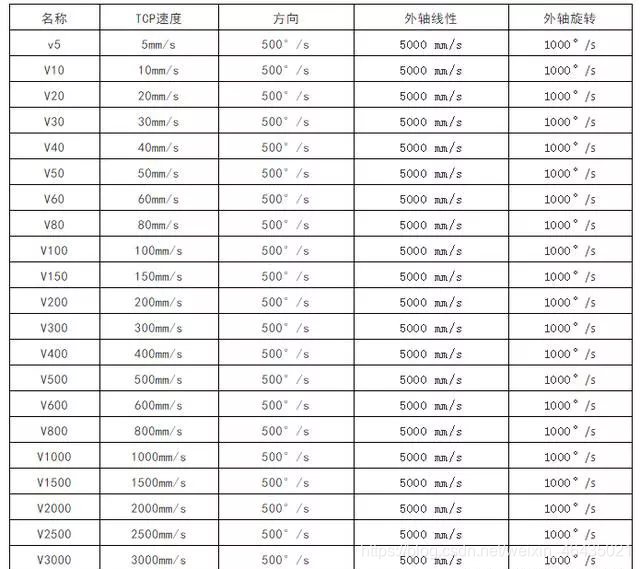 (2)通过指令MoveExtJ,预定义有待使用的速度数据,以移动旋转外轴。
(2)通过指令MoveExtJ,预定义有待使用的速度数据,以移动旋转外轴。 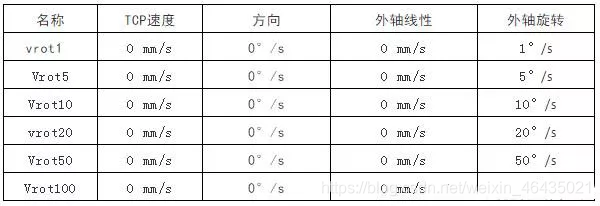 (3)通过指令MoveExtJ,预定义有待使用的速度数据,以移动线性外轴。
(3)通过指令MoveExtJ,预定义有待使用的速度数据,以移动线性外轴。 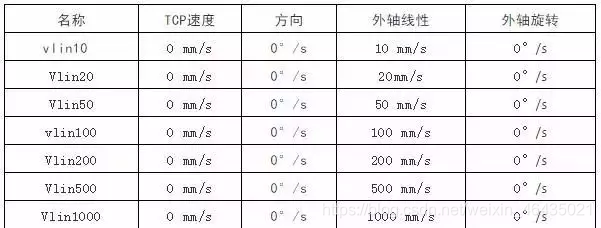
【本文地址】
今日新闻 |
推荐新闻 |