工业机器人课程:ABB知识点25 |
您所在的位置:网站首页 › 工业机器人movel和movej › 工业机器人课程:ABB知识点25 |
工业机器人课程:ABB知识点25
|
原标题:工业机器人课程:ABB知识点25|运动指令——MoveAbsJ 本节要点 · 掌握MoveAbsJ指令的使用 · 了解robtarget和jointtarget数据的区别 · 了解MoveJ和MoveAbsJ的区别 要点解析 MoveAbsJ 指令 MoveAbsJ 指令:移动机械臂至绝对位置。机器人以单轴运动的方式运动至目标点,不存在死点,运动状态完全不可控制,避免在正常生产中使用此命令。指令中TCP 与 Wobj只与运动速度有关,与运动位置无关。MoveAbsJ 指令常用于检查机器人零点位置,其指令示例如下图所示。
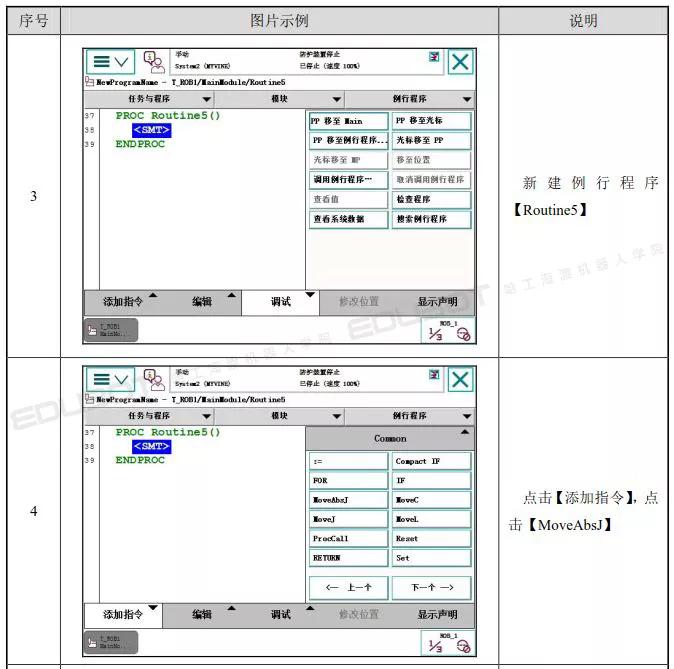
MoveAbsJ 指令示例 robtarget 和 jointtarget 数据的区别 robtarget:以机器人 TCP 点的位置和姿态记录机器人位置。用于 MoveJ、MoveL、MoveC 指令中。 jointtarget:以机器人各个关节值来记录机器人位置,常用于机器人运动至特定的关节角。用于MoveAbsJ 指令中。 MoveJ 和 MoveAbsJ 的区别 MoveJ 和 MoveAbsJ 的运动轨迹相同,都是以关节方式运动,所不同的是所采用的数据点类型不同。 操作步骤 程序编写 展开全文程序编写的操作步骤见下表。
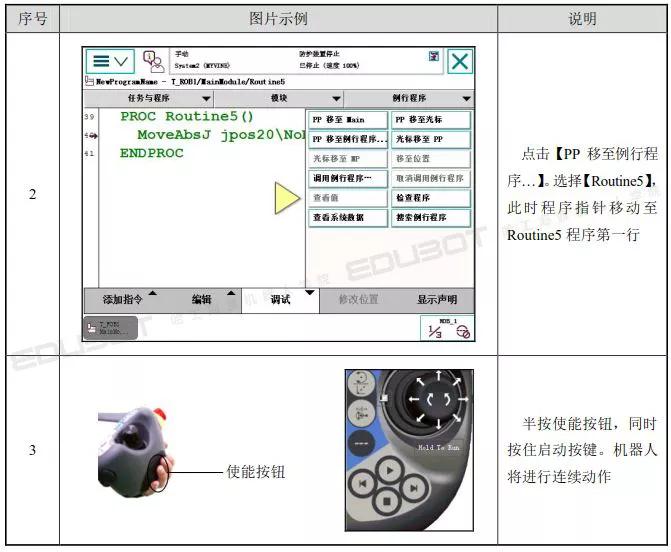
程序调试 程序调试的操作步骤见下表。
具体操作视频请进入海渡学院APP免费观看!QQ交流群:563403891返回搜狐,查看更多 责任编辑: |






【本文地址】
今日新闻 |
推荐新闻 |