伺服位置模式参数设置 |
您所在的位置:网站首页 › 川禾伺服驱动器怎么接线视频讲解 › 伺服位置模式参数设置 |
伺服位置模式参数设置
|
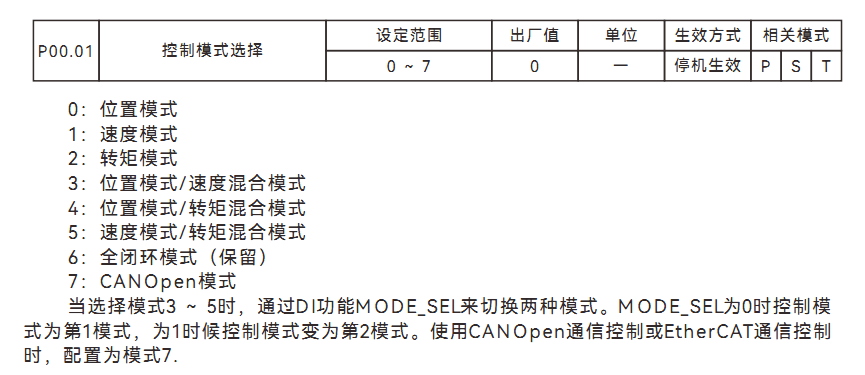
禾川X2E伺服驱动器为例子: P00.01 控制模式选择,在SMT上肯定使用的是位置模式设置为0
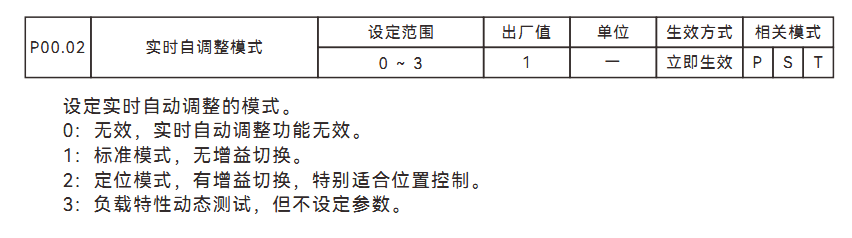
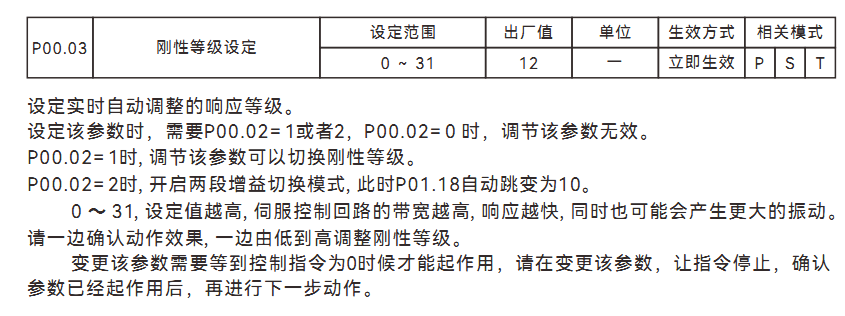
P00.02 实时自调整模式,这个参数是配合P00.03来使用的。设置为0则位置增益,速度增益,速度积分这些参数需要自己手动调整。如果设置为1时,表示使用一组增益参数,一共有两组增益参数,至于使用那一组使用P01.18来控制使用第一组还是第二组参数。如果P00.02设置为2则驱动器内部会自动在增益参数1和增益参数2之间来切换,切换条件参考P01.18设置为10时候的条件。此时两组增益参数时无法改变的,只能通过P00.03来设置刚性等级改变增益参数。
P00.04 惯量比,非常重要的参数,一般使用自动识别惯量比来设置,很多其他的参数时通过惯量比来计算的。自动设置惯量比可以参考5.3.2,其实应该首先就设置惯量比,然后再设置增益参数
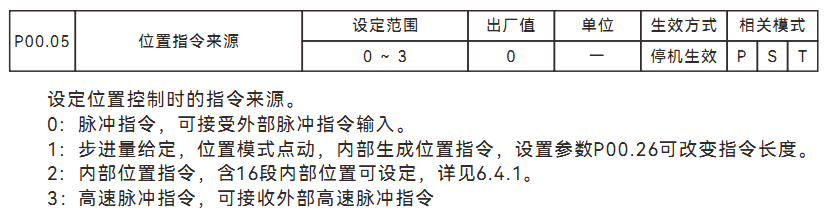
P00.05 位置指令来源,默认外部脉冲控制,SMT上就是用这种方式,通过STM32F4来发送脉冲控制。
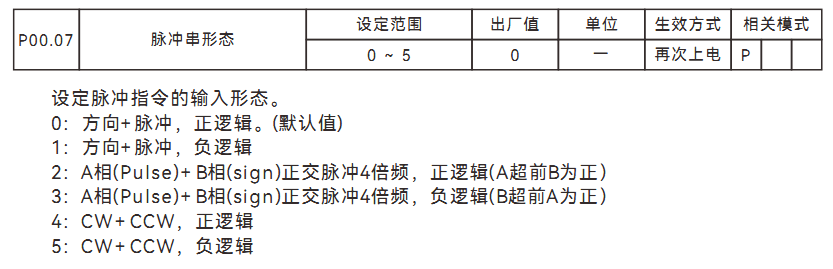
P00.07 SMT上使用方向+脉冲控制模式,一个信号高低控制方向,一个信号控制速度和位置
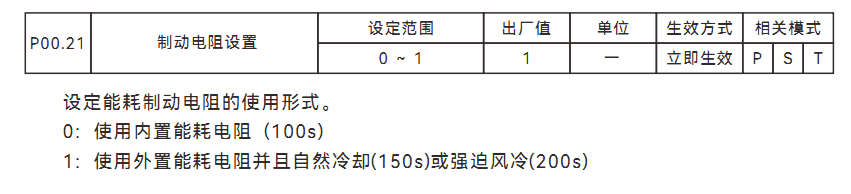
P00.08 电机一圈所需要的脉冲数,如果是整数直接设置此寄存器即可,加能华SMT贴片机上设置为4000,也就是4000个脉冲电机旋转一圈 P00.10 电子齿轮比分子,一般填伺服电机编码器分辨率即可,表示电机旋转一圈编码器输出脉冲数 P00.12 电子齿轮比分母,表示输出多少个脉冲电机旋转一圈。和P00.08的含义相似,但是分子分母配合同时根据丝杆的导程可以精确的控制电机每转一圈或者控制端每发送一个脉冲负载前进多少距离。 例子:丝杆旋转一圈前进40mm , 编码器分辨率为2^20 = 1048576,每个脉冲需要前进0.01mm ,问电子齿轮比如何设置? 解答:旋转一圈需要发送的脉冲数为40/0.01 = 4000,所以分子填1048576,分母为4000。注意使用分子分母的时候P00.08必须设置为0,否则不起作用 P00.21 设置使用外置再生电阻还是内置电阻
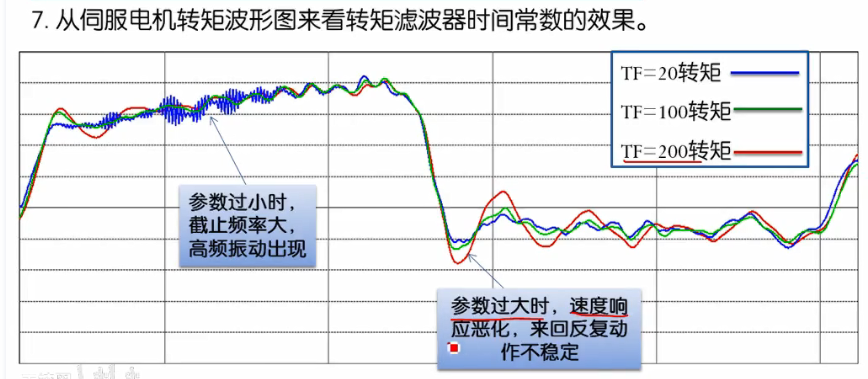
P00.22 设置再生电阻的功率 P00.23 设置再生电阻的阻值 P01.04 转矩指令滤波1,需要调整这个参数,抑制共振(衰减共振)。如果通过示波器看转矩曲线存在震荡,则需要设置这个参数。但是一般使用增益实时自调整和刚性等级设置时,此参数时不可更改的。下图分辨设置转矩滤波器为20 , 100 , 200的时候转矩曲线变化图,发现国小的时候蓝色线高频振动,这只过大时会响应不及时来回反复超调。
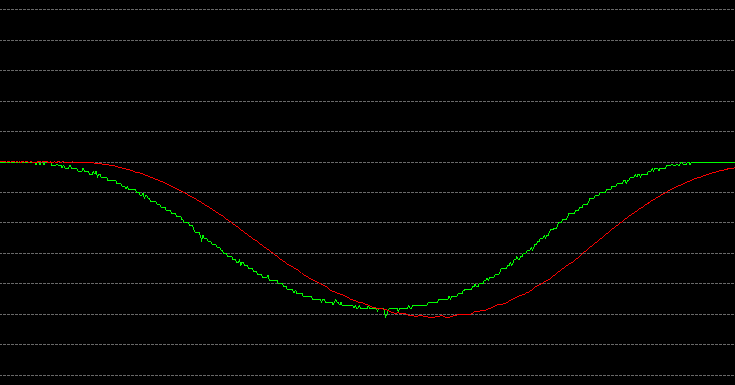
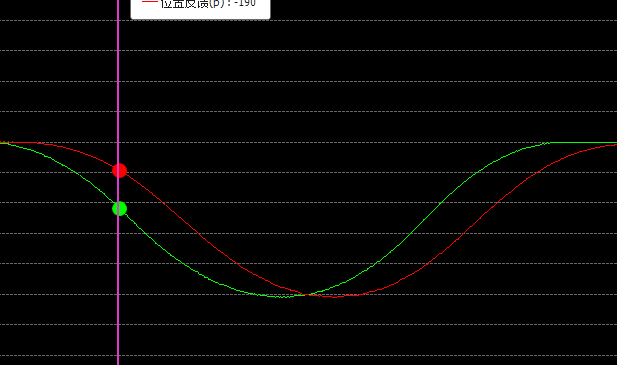
P02.00 位置指令平滑滤波,如果输入的脉冲不平滑,则需要设置这个参数。如下图1位置指令平滑滤波设置为0时绿色的线为位置指令上毛糙不平滑,当位置指令平滑滤波器设置为10如图2绿色位置指令平滑了很多。P02.01 位置指令FIR滤波作用和P02.00差不多,前者使用的曲线平滑,后者使用的是直线斜坡平滑。基本设置其中的一个就可以了
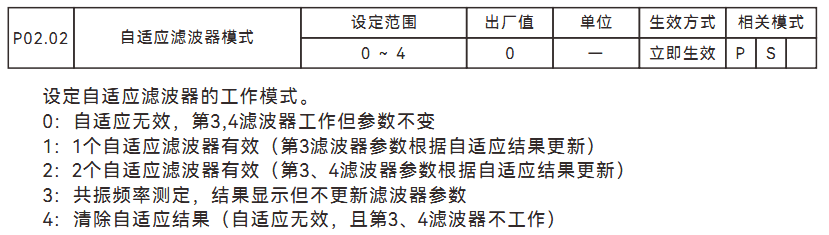
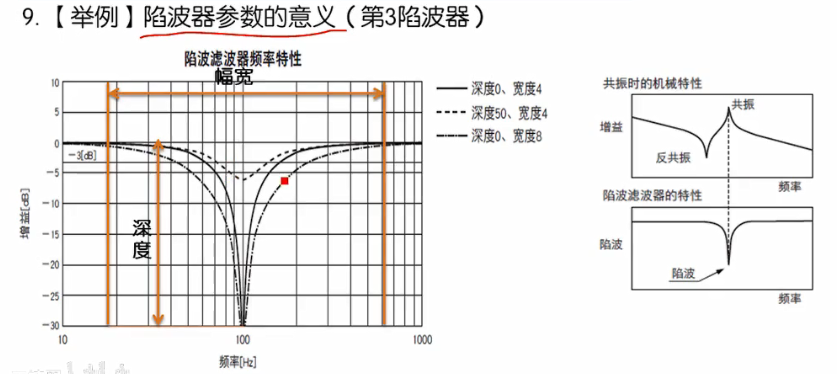
P02.02 自适应滤波器模式,自适应滤波器就是陷波滤波器。陷波滤波器有4组,设置使用哪一组陷波滤波器参数。陷波滤波器可以一直波峰,可以使增益值设置的更大,并降低震动。1,2陷波滤波器手动设置,3,4陷波滤波器自动更新设置。如果有两个共振点则需要设置为2。注意陷波滤波器深度值越大陷波深度越小,反之越大。
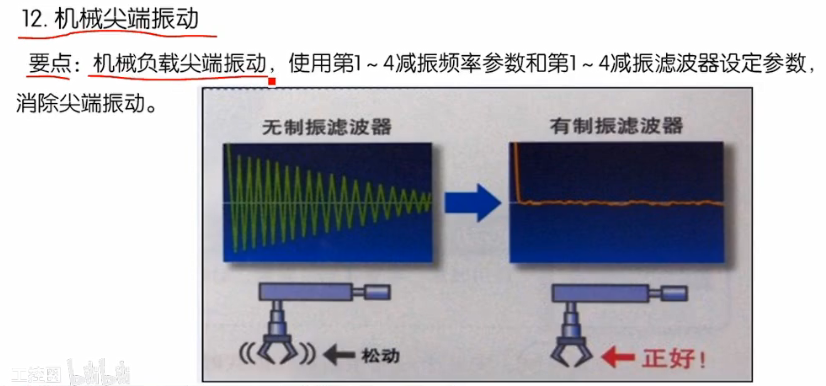
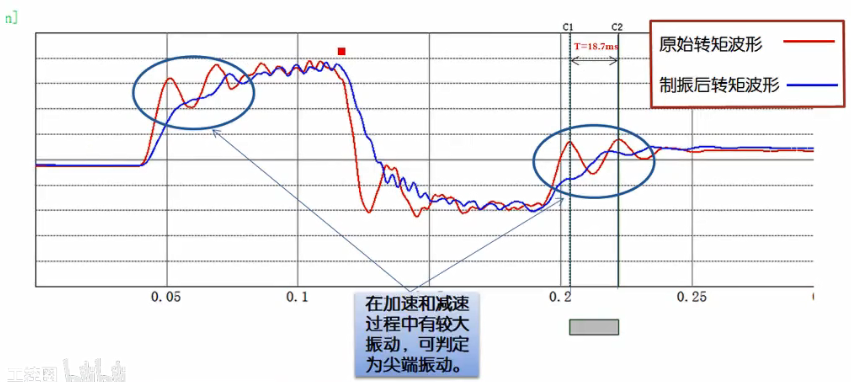
P02.20 P02.21 设置减震频率和震动滤波器,主要用于减小机械手尖端的震动,也就是手臂太长停止的时候的晃动。可以从转矩波形的震动波形,来测出震动频率。
转矩前馈是在加减速的时候起作用,速度前馈是在稳定运行的时候起作用,他们各管一段。实时调整的时候此参数也只能通过调整刚性等级来调整。 |

【本文地址】
今日新闻 |
推荐新闻 |