无人机组装调试步骤(保姆级别教程) |
您所在的位置:网站首页 › 小飞01无人机怎么组装 › 无人机组装调试步骤(保姆级别教程) |
无人机组装调试步骤(保姆级别教程)
|
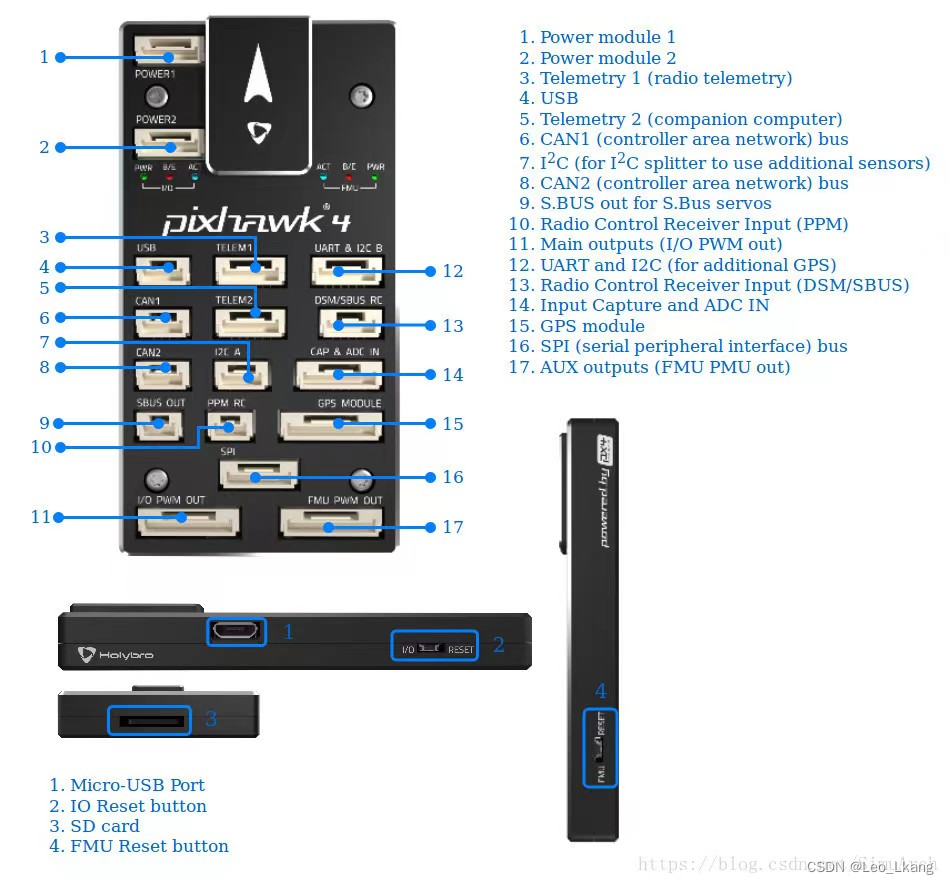
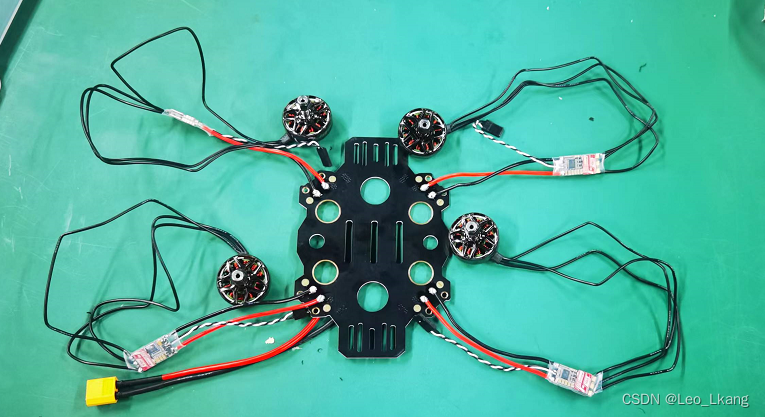
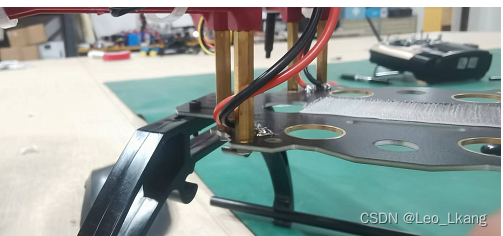
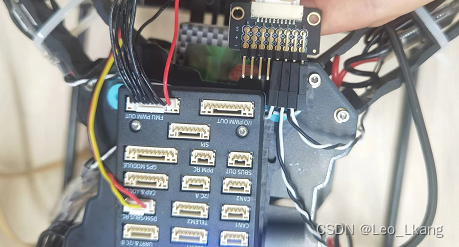
YH远航科技模型(Pixhawk飞控) 新动模型(电机,电调) 相应的电机,电调,机臂的连接 https://m.tb.cn/h.UcqJUyV?tk=Gu7x2xdmO4g https://m.tb.cn/h.UcqKqIH?tk=vL7t2xdly3d https://m.tb.cn/h.U1E0Oag?tk=jGMT2xdOL6f pixhawk接口 我们要用到的接口 POWER1(1):我们将电源模块接入这个接口 POWER2(2):这个和POWER1功能类似 DSM/SUBS RC(13):这个接口连接上遥控器接收机 FMU PWM OUT(17):电调如果要连上pixhawk,可在17号接口接上扩展针 Micro-USB port 用侧面的usb接口连接电脑,可以让电脑调试pixhawk 基本框架的组装首先进行拼接操作 将机架和板子连接起来 pixhawk在POWER1接口上连接上电源模块 然后地板和电调焊接成下图这个样子 其中红色的线接地板的+(正)级 黑色的线接地板的-(负)级 然后通过铜柱将焊板和上支架连接起来(如下图所示),将起落架也安装上
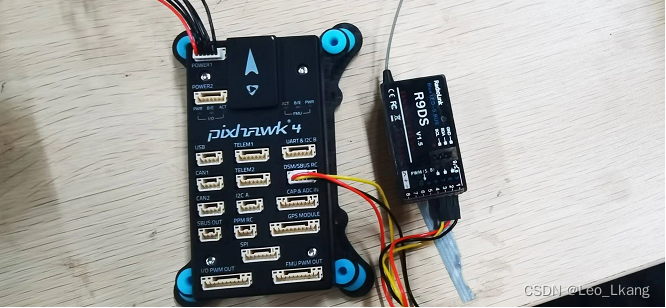 遥控器接收器连接的时候黑线在右,黄线在左(当给px4供电的时候能亮就行) 遥控器接收器连接的时候黑线在右,黄线在左(当给px4供电的时候能亮就行)  电调的连接 电调的连接
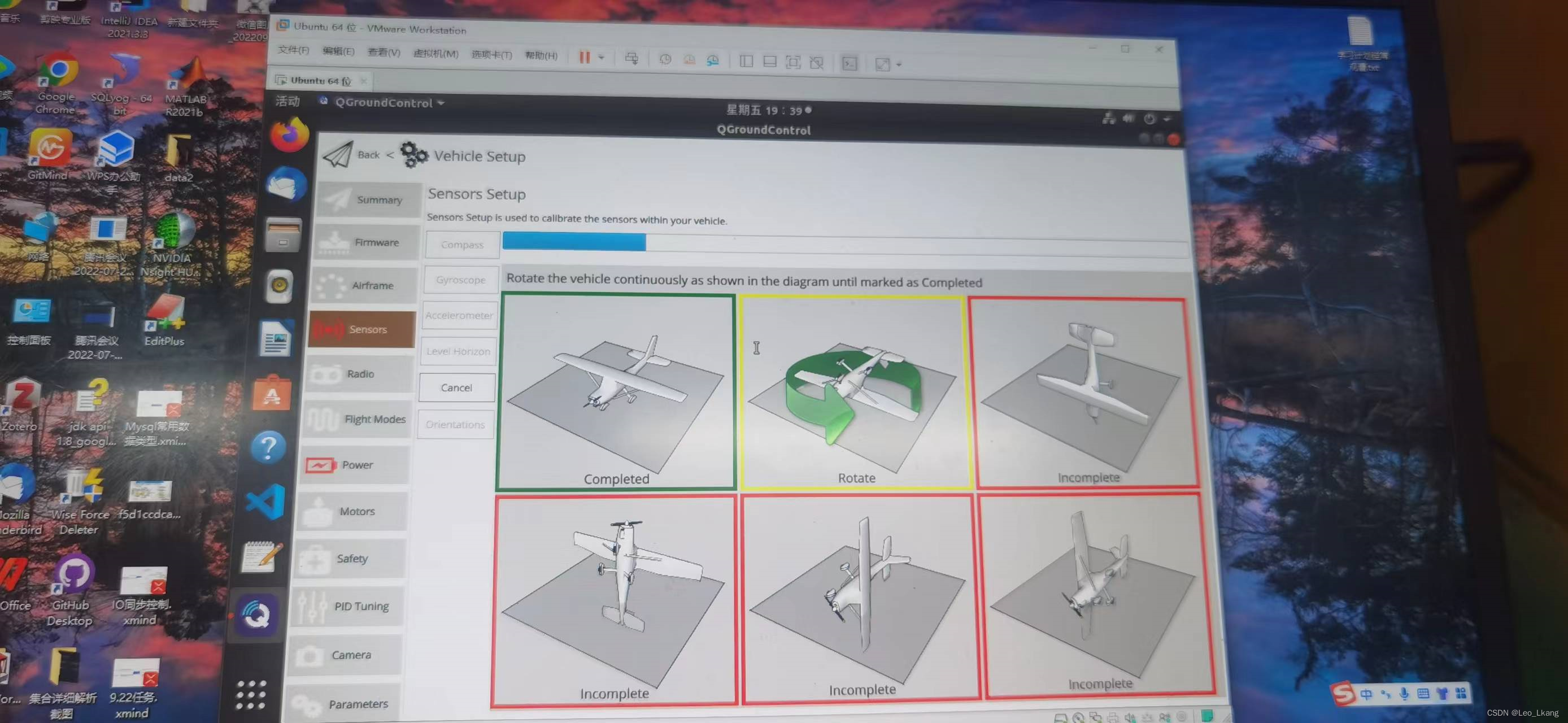
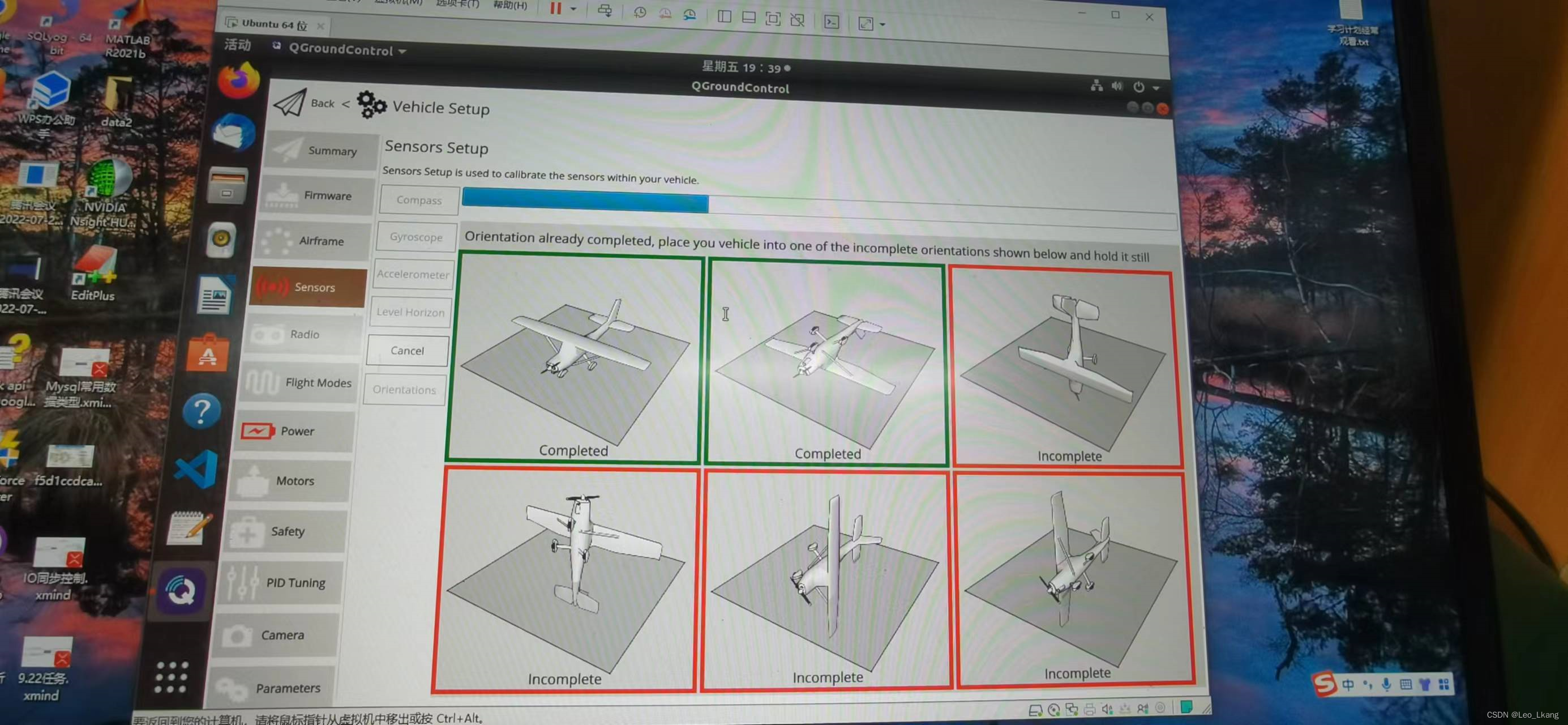
 打开遥控器,遥控器圈画的地方没有信号,代表遥控器和飞机没有配对 打开遥控器,遥控器圈画的地方没有信号,代表遥控器和飞机没有配对 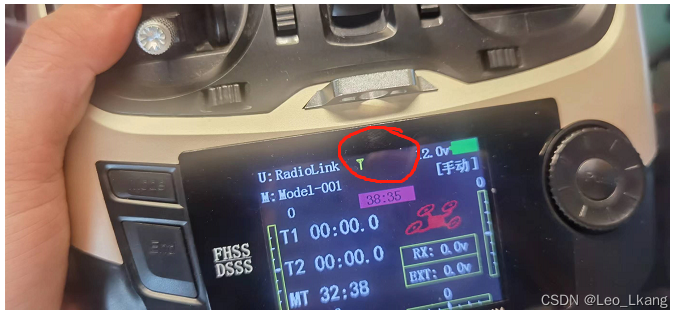 当配对成功的时候遥控器上会有如下的信号产生 当配对成功的时候遥控器上会有如下的信号产生 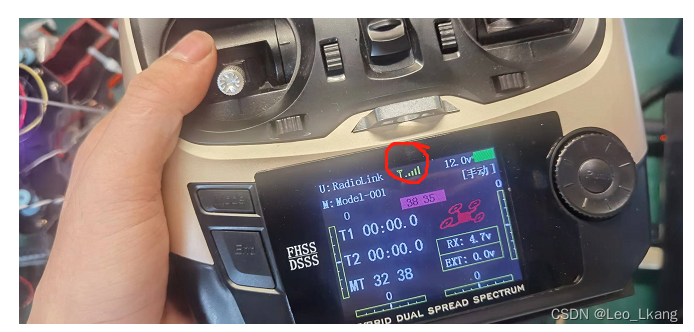 长按Model键,进入如下界面 长按Model键,进入如下界面 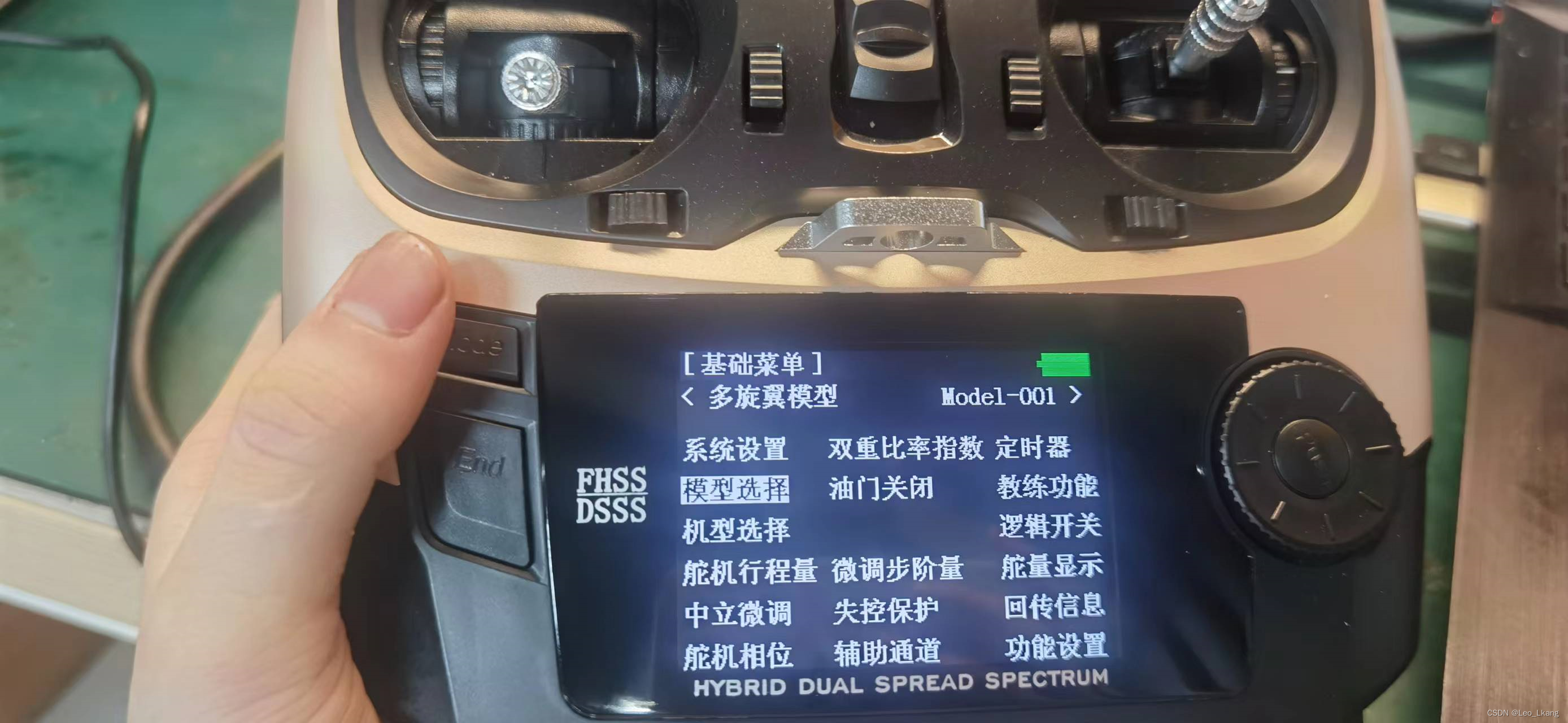 选择如下所示的四旋翼模型 选择如下所示的四旋翼模型  稳定性调试 进入airframe,选择Quadrotor x(3DR DIY Quad) 稳定性调试 进入airframe,选择Quadrotor x(3DR DIY Quad)  进入Sensors调节,挨个进行调试 进入Sensors调节,挨个进行调试
进入到Analyze Tools当中
在重启QGC,插拔电源,关闭遥控器重新连接即可使得电机转动,基本的飞行搭建便完成了 |
 门店:
门店: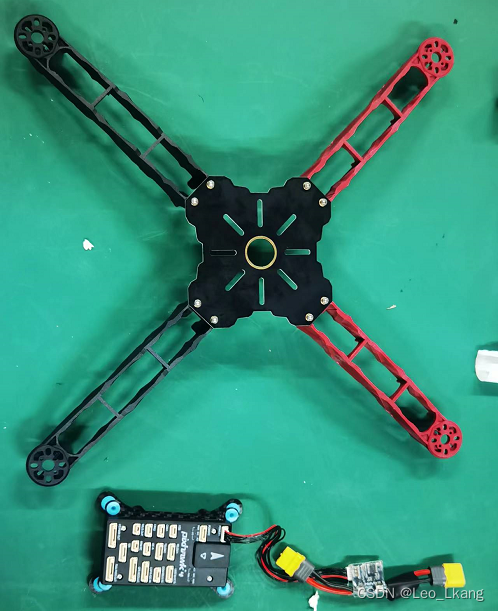
 在焊板后面(或者焊接电调的地方)将连接电池的接口线焊接上(注意公母头的区别)
在焊板后面(或者焊接电调的地方)将连接电池的接口线焊接上(注意公母头的区别) 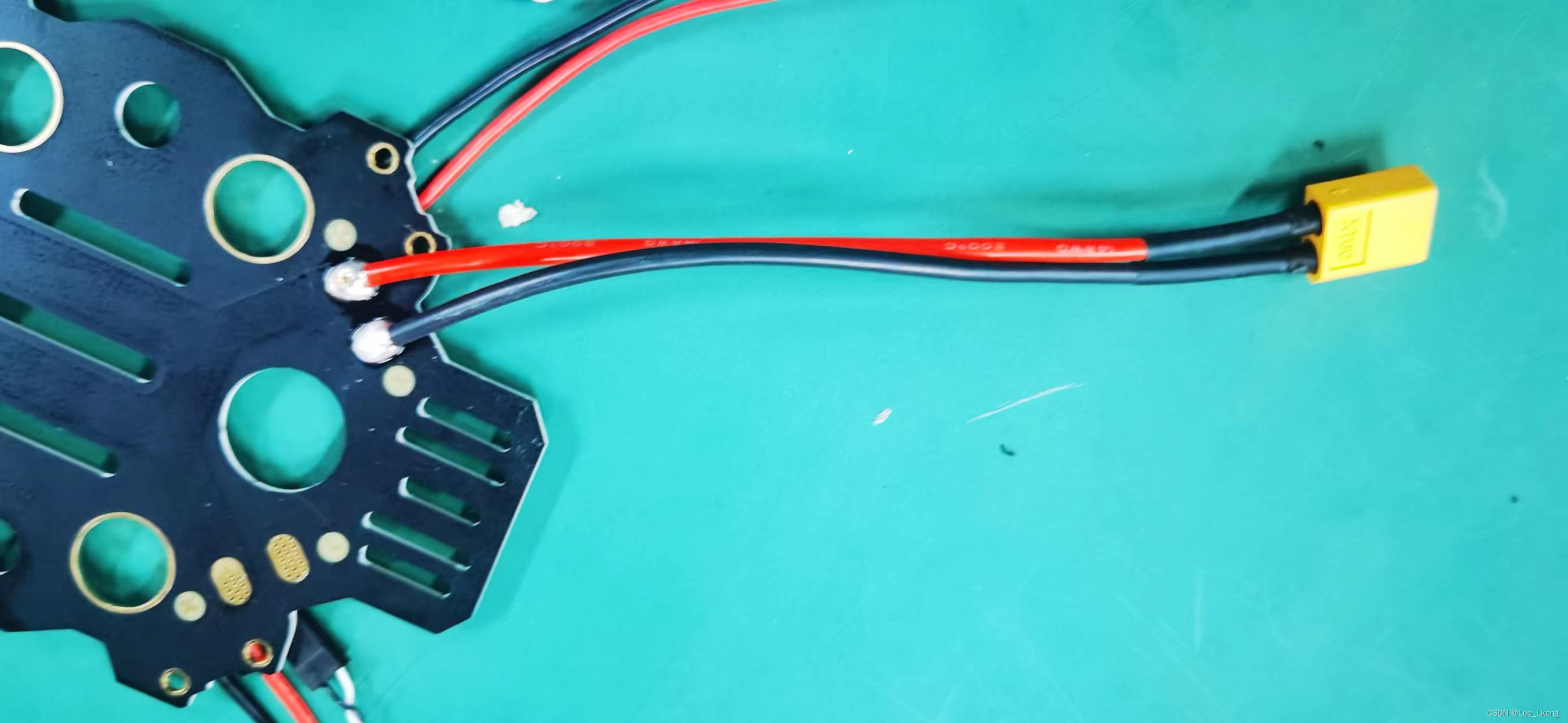
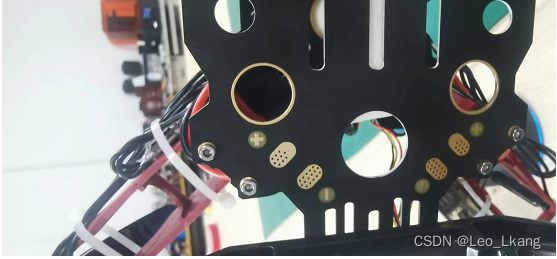

 最后大致无人机样子如下:
最后大致无人机样子如下: 
 注意:其中白线要接在S端,在这里也就是白线在上,黑线在下,并且在连接的时候,并且右上的电调连在数字1处,左下的连接线连在数字2处,左上的电调线连在数字三处,右下的电调线连在数字4处 具体的机臂编号如下图所示
注意:其中白线要接在S端,在这里也就是白线在上,黑线在下,并且在连接的时候,并且右上的电调连在数字1处,左下的连接线连在数字2处,左上的电调线连在数字三处,右下的电调线连在数字4处 具体的机臂编号如下图所示 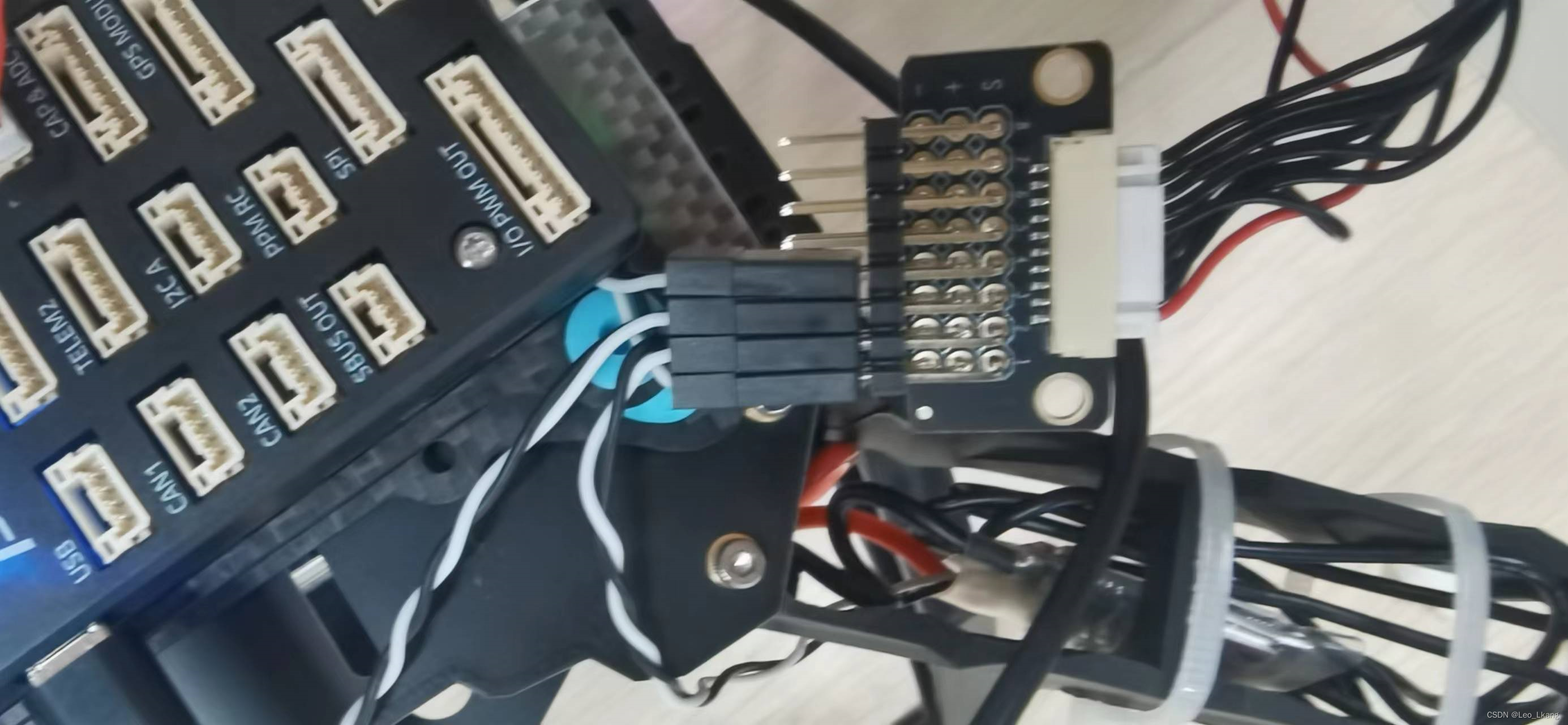

 点击Calibrate,调节遥控器
点击Calibrate,调节遥控器 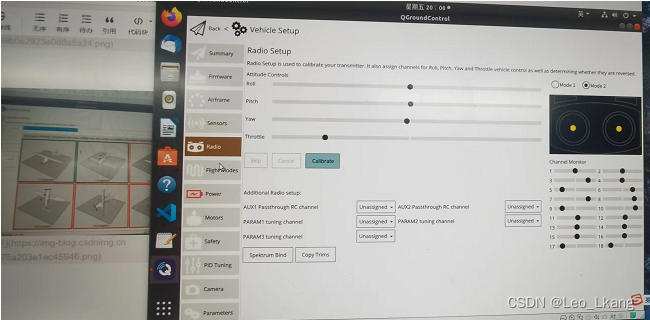 进入Flight Modes 将Mode Channel 转换为Channel5 Flight Model1 改为Manual Flight Model4 改为Position Flight Model6 改为Offboard 将Arm Switch 改为Channel10 将Emergency kill switch channel 改为Channel9
进入Flight Modes 将Mode Channel 转换为Channel5 Flight Model1 改为Manual Flight Model4 改为Position Flight Model6 改为Offboard 将Arm Switch 改为Channel10 将Emergency kill switch channel 改为Channel9 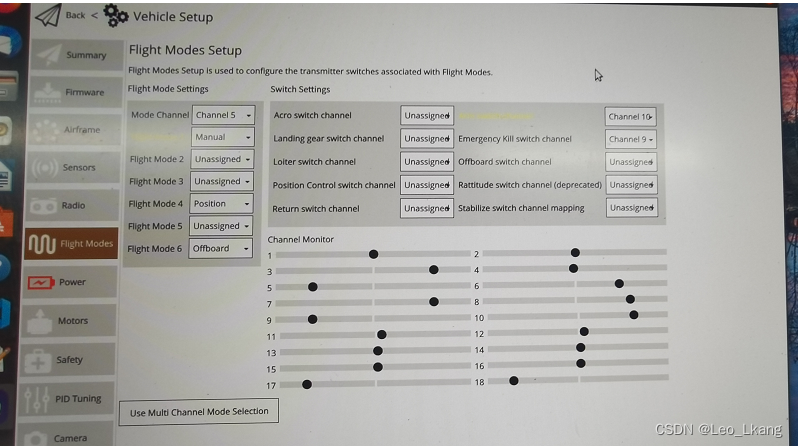 在Parameters里面调节相关参数 大致这个调节以下参数 将EKF2_HGT_MODE 选择Vision
在Parameters里面调节相关参数 大致这个调节以下参数 将EKF2_HGT_MODE 选择Vision 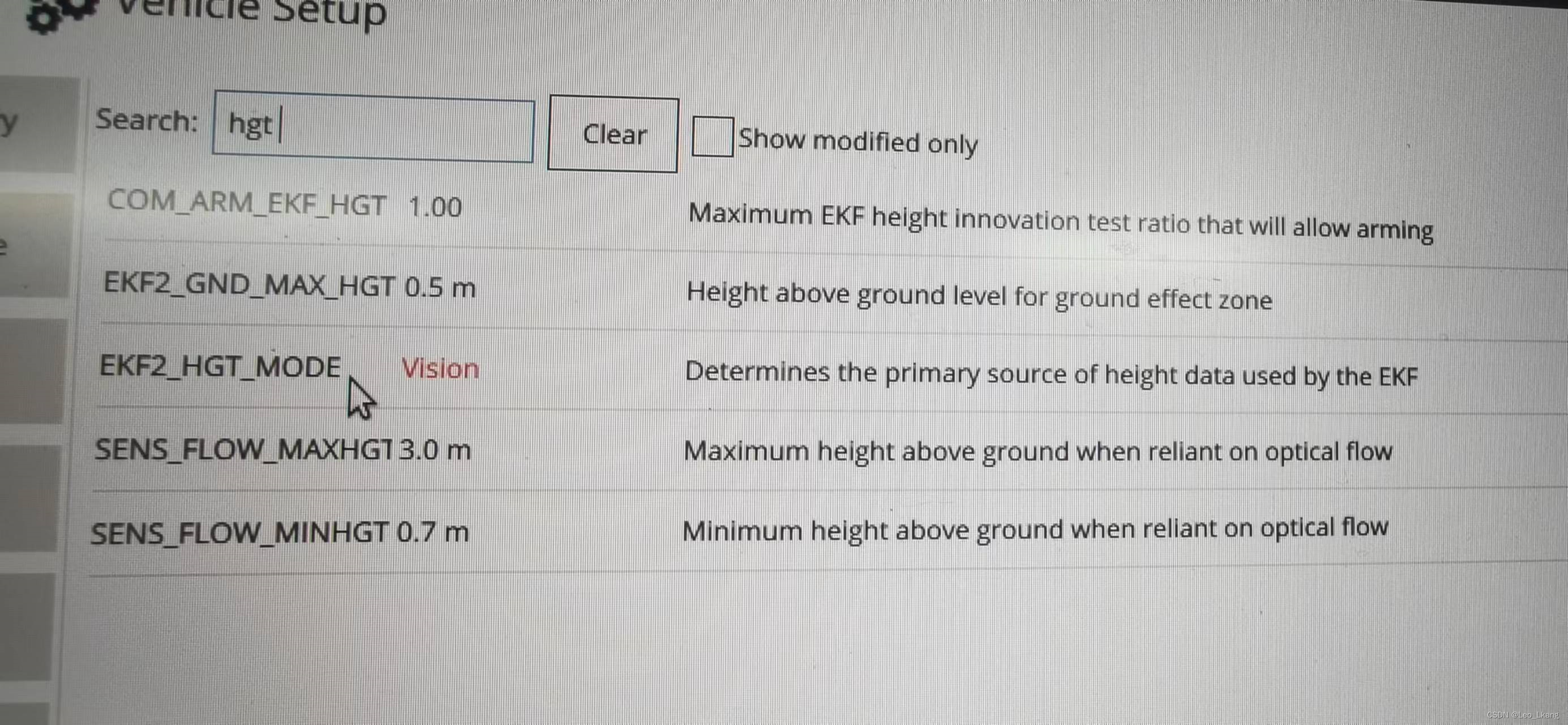 将EKF2_AID_MASK改为24(将两个vision勾起来)
将EKF2_AID_MASK改为24(将两个vision勾起来) 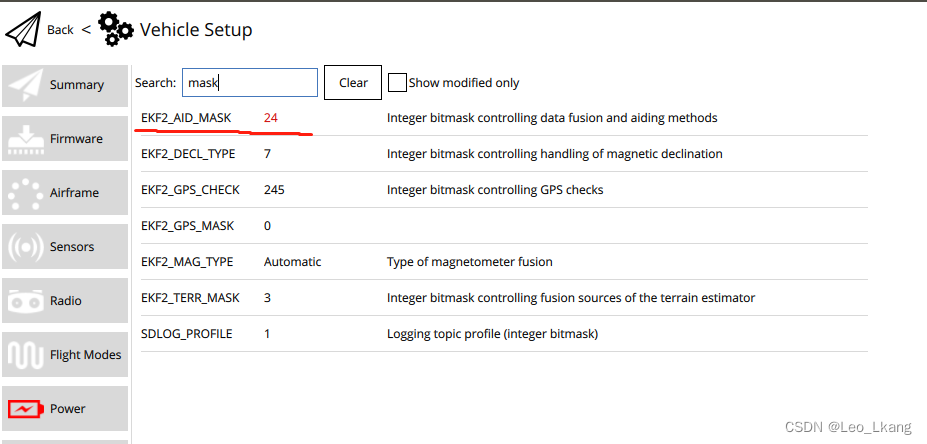 将CBRK_USB_CHK设置为最大值
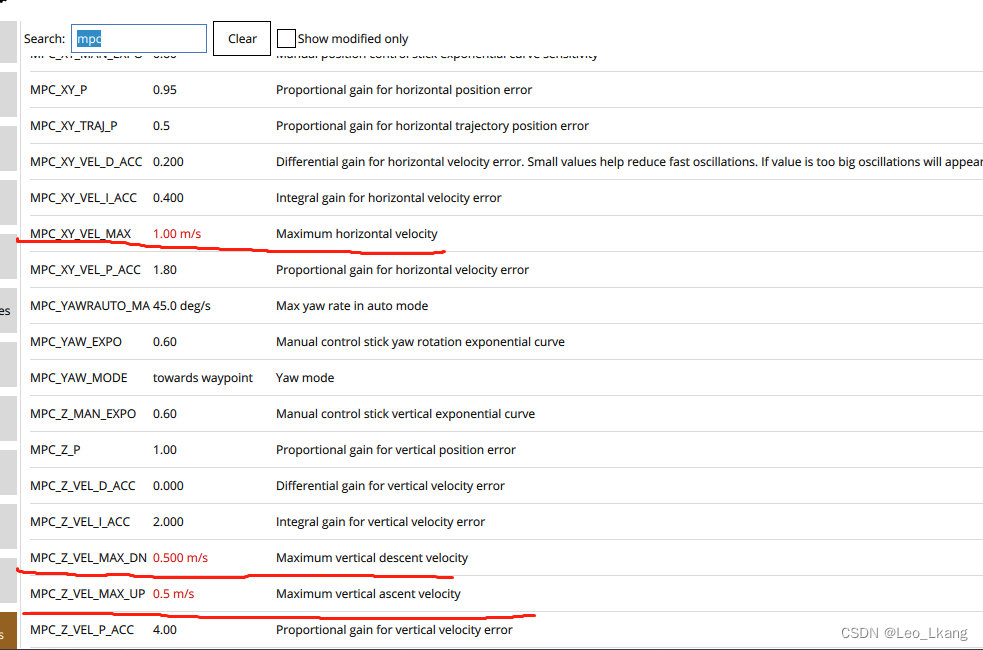
将CBRK_USB_CHK设置为最大值 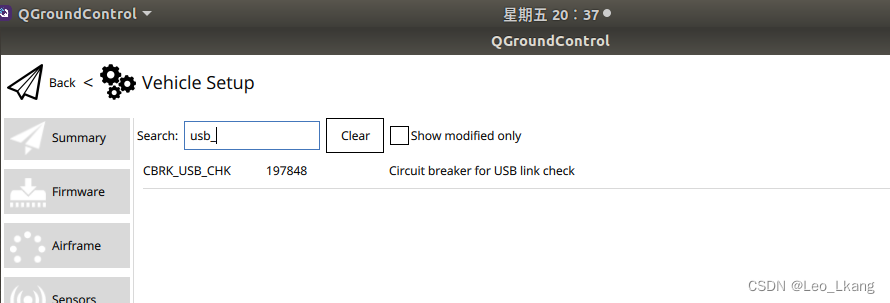 将如下红色圈画部分参数改为如下设置的值的大小
将如下红色圈画部分参数改为如下设置的值的大小 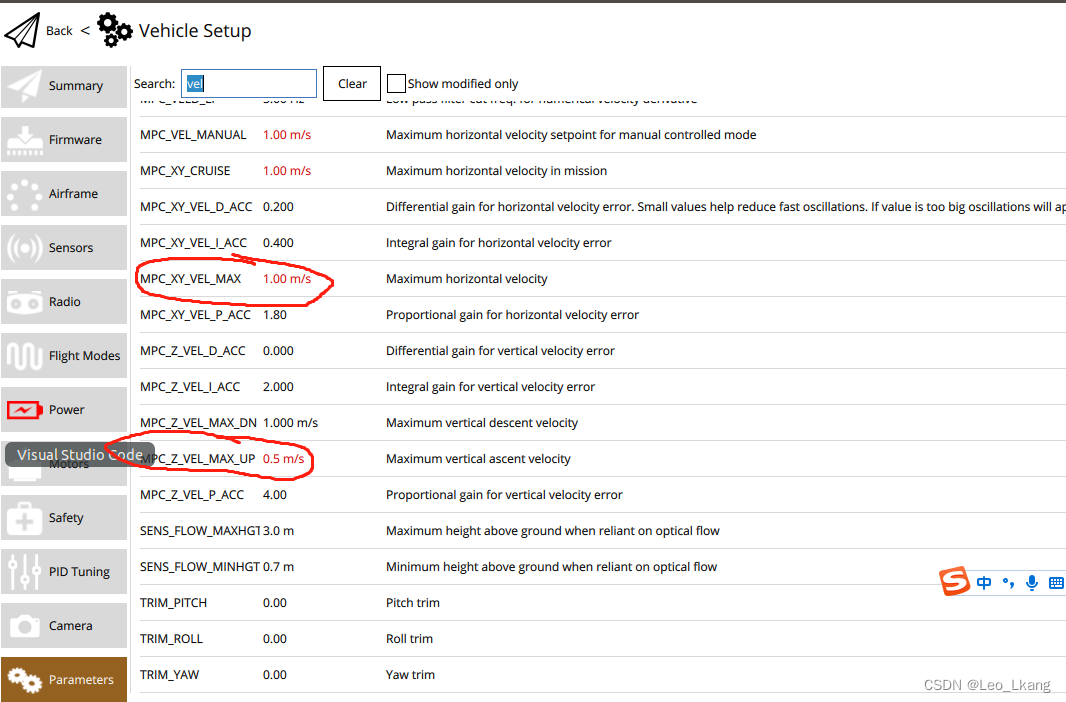
 将dshot设置为dshot600
将dshot设置为dshot600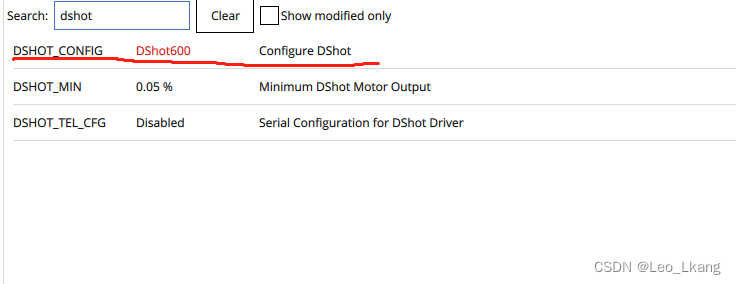 将MC_YAWRATE_MAX 设置为90deg/s(Max yaw rate)
将MC_YAWRATE_MAX 设置为90deg/s(Max yaw rate) 调节舵机的转向 最终使得点击按照如下方式进行转动
调节舵机的转向 最终使得点击按照如下方式进行转动 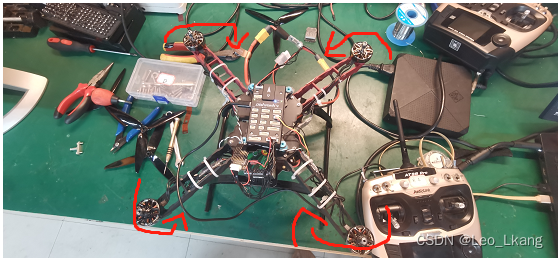
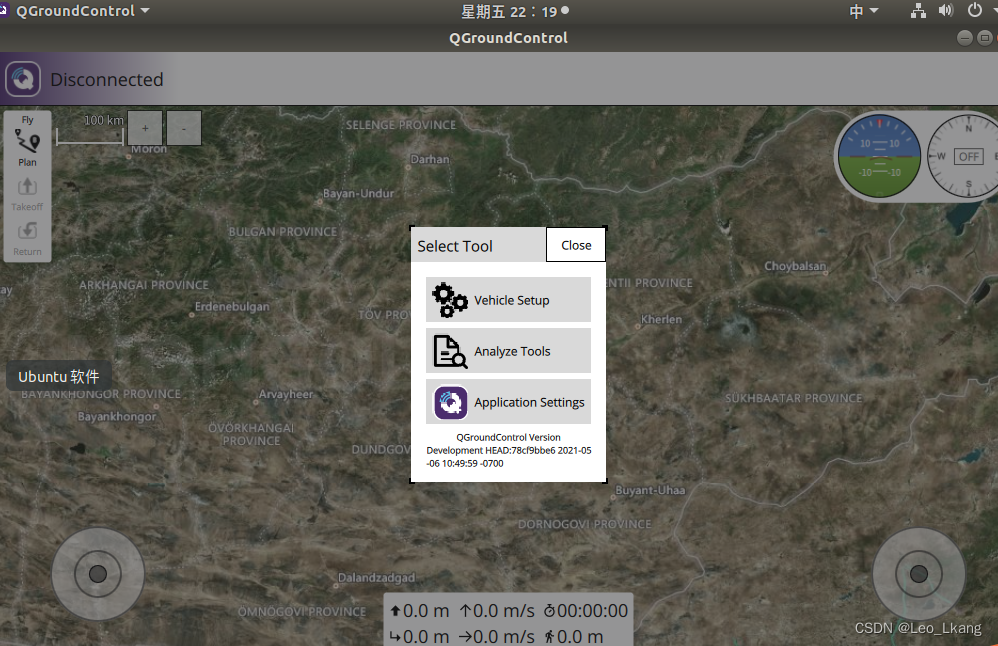 选择MAVLink Console
选择MAVLink Console 在这个命令行输入: dshot reverse -m 1(这个是你想要改变的电机的号数) dshot save -m 1(这样就能够将电机的状态保存下来)
在这个命令行输入: dshot reverse -m 1(这个是你想要改变的电机的号数) dshot save -m 1(这样就能够将电机的状态保存下来)【本文地址】
今日新闻 |
推荐新闻 |