UE |
您所在的位置:网站首页 › 如何开启导航系统 › UE |
UE
|
文章目录
一、基本导航二、修改导航网格1.使用Navigation Modifier Volumes2.使用Nav Link Proxy2.1 连接两个导航区域2.2 修改连接方向2.3 使用SmartLink
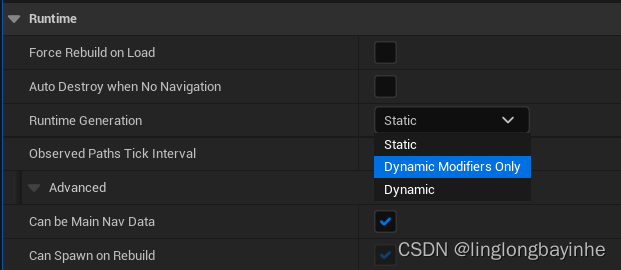
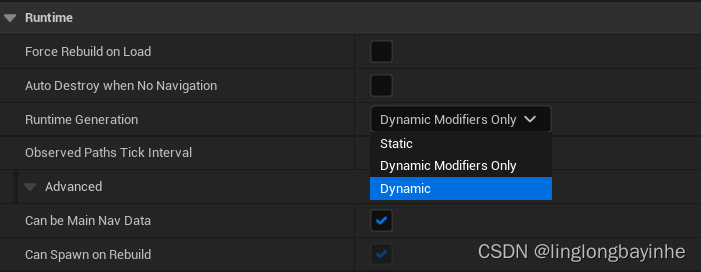
3 实时生成导航模型Dynamic Modifiers OnlyDynamic
三、自定义导航区域和查询筛选器1. 自定义区域类(Nav Area)2. 创建导航查询筛选器(Navigation Query Filter)
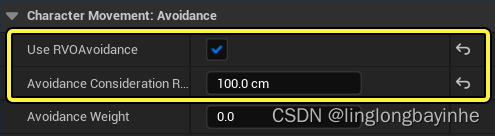
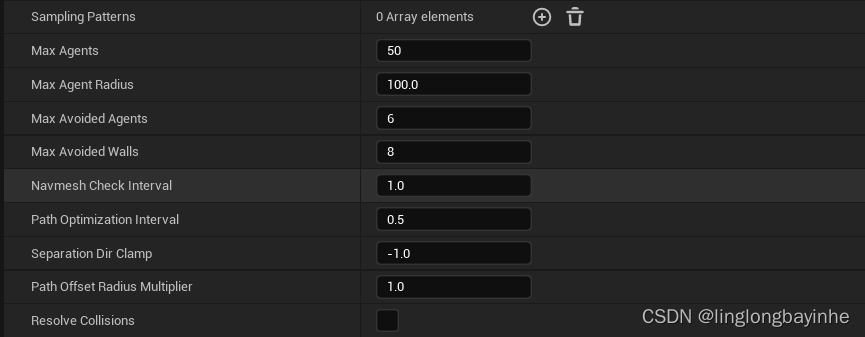
四、在导航系统中使用回避1. 使用RVO避免(Reciprocal Velocity Obstacles)2. 使用人群绕行避免(Detour Crowd Manager)
五、使用Navigation Invokers六、优化导航网格生成速度1. 建议1.1 尽可能使用最高Cell Size和Cell Height1.2 限制Tile Size1.3 对网格使用简化碰撞1.4 减少影响导航网格的对象数
2. 用于管理导航生成的有用开发人员工具
七、世界分区静态导航网格体
一、基本导航
构建导航网格 拖拽NavMeshBoundsVolume到关卡内。
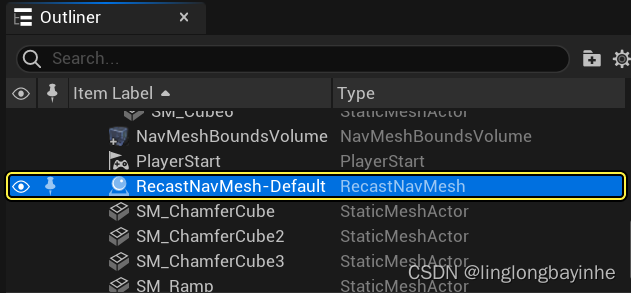
自动更新导航网格: 在 编辑器设置(Editor Settings)->Level Editor->Miscellaneous-> 启用自动更新导航(Update Navigation Automatically)。 可视化导航网格 关卡中找到RecastNavMesh-Default,并在Detail里勾选Draw Poly Edges或Draw Tile Bounds。Draw Poly Edges: 绘制组成网格的多边形。 Draw Tile Bounds: 可视化单个Navigation Tiles
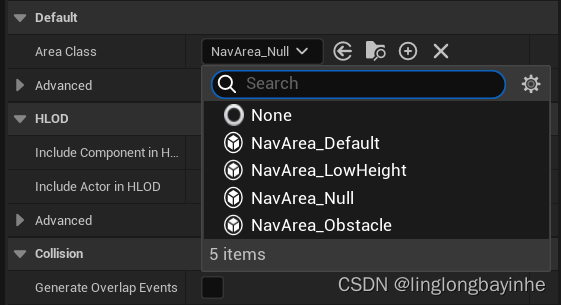
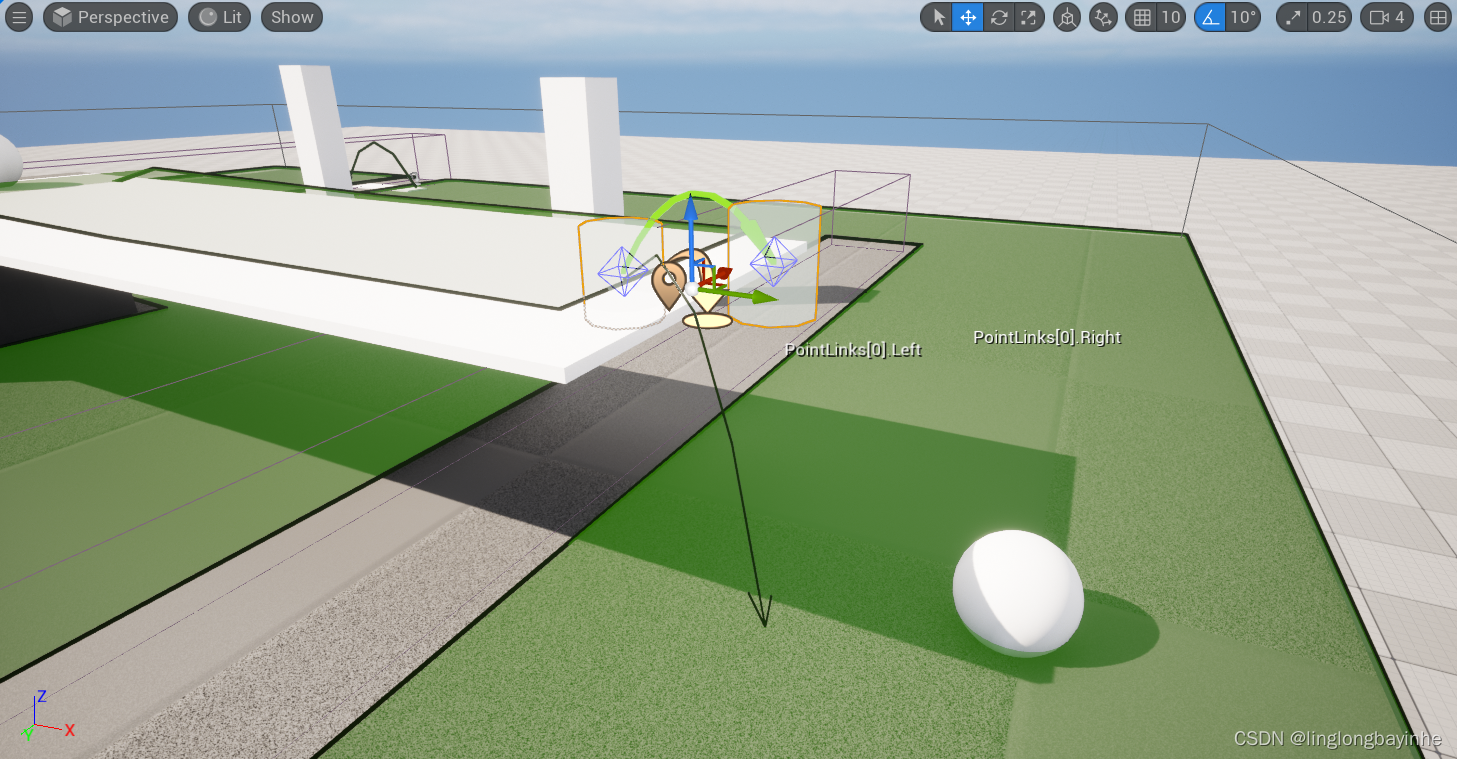
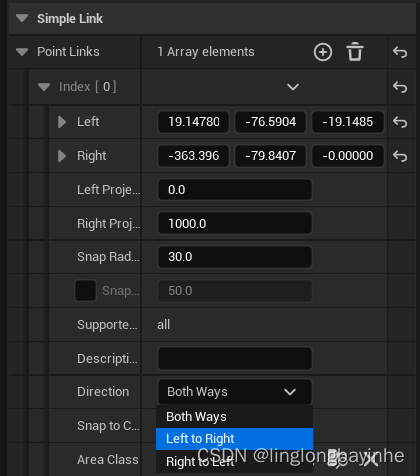
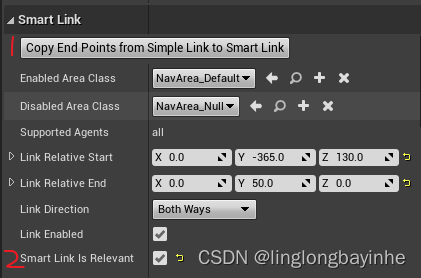
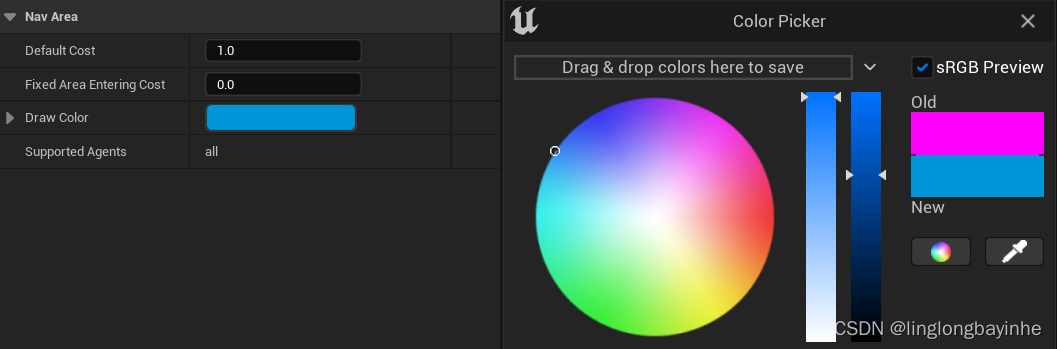
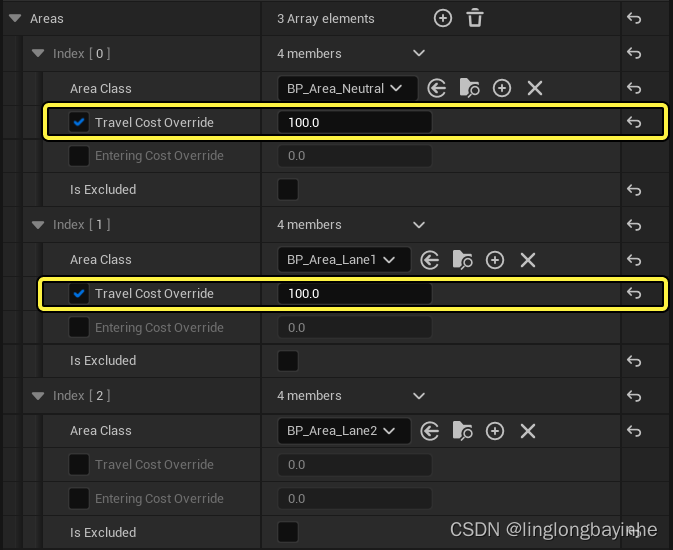
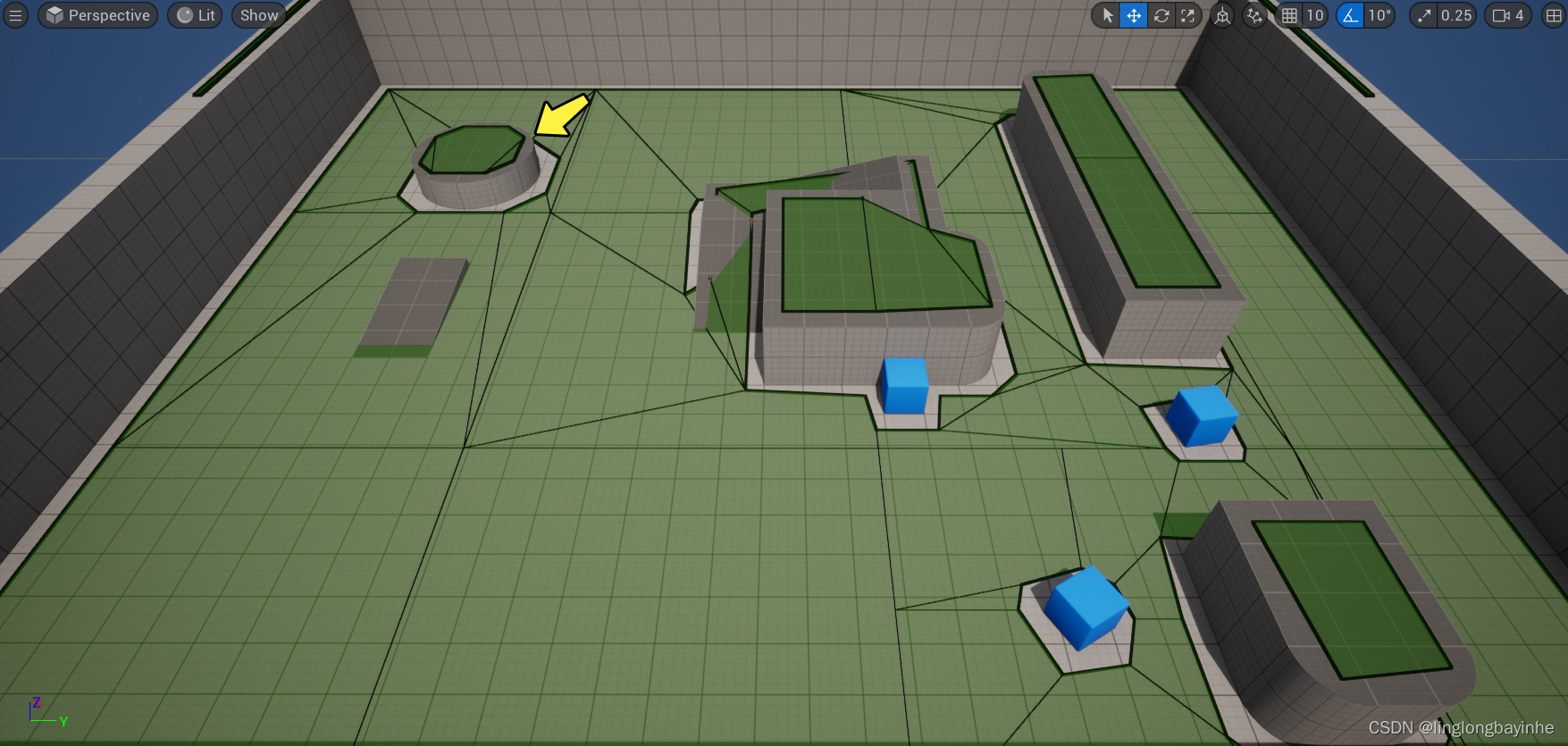
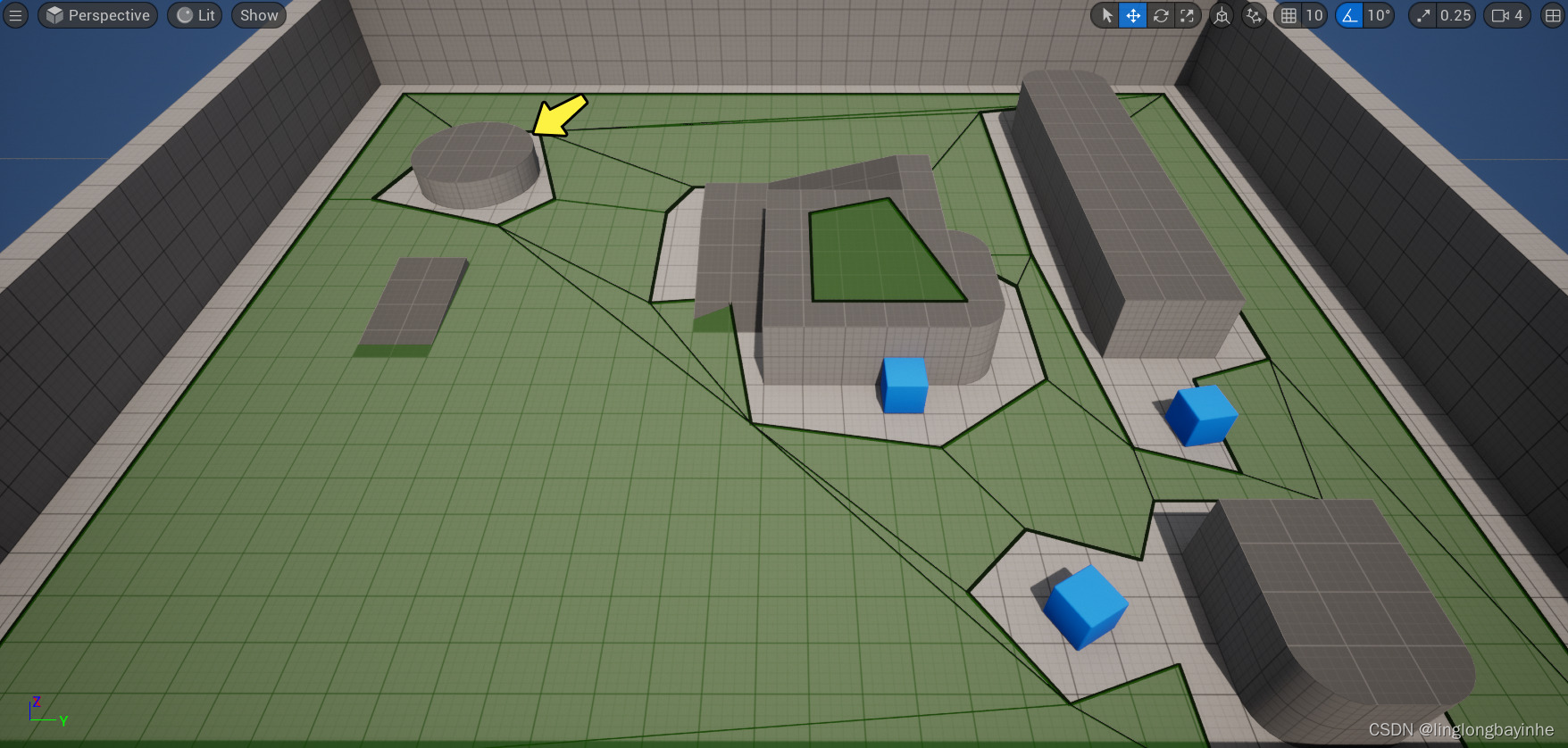
AreaClass应用于导航网格,用于更改体积空间内多边形的属性以修改其通过成本。 Nav Link Proxy连接导航网格中两个不相连的导航区域。 在搜索路径时,Nav Link Proxy用作Agent到达其目的地的额外连接。指示代理在没有可用的连续导航路径时可以从平台跌落或跳向目标。 Note: 如果 Nav Link Proxy 未与 Navigation Mesh 的表面连接,黑色箭头将消失。(在UE4里是绿色箭头) 黑色箭头是实际AI的导航路径。 2.2 修改连接方向在SimpleLink里,可以修改连接方向。 使用SmartLink,让Agent跳到高处。 Warning: Nav Link Proxy只能连接相邻的导航网格Tile Bounds。您可以通过选择“WorldOutliner”–>“RecastNavMesh-Default”–>启用“Draw Tile Bounds”来可视化Tile Bounds。 3 实时生成导航模型 Generation Mode描述Static导航网格离线生成,并与关卡一起保存。 在运行时加载,无法更改。Dynamic离线生成并与关卡一起保存或在运行时构建。 在运行时,可以实时更新并生成导航相关数据。Dynamic Modifiers Only导航网格是离线生成的,并与关卡一起保存。 在运行时,只有 Navigation Modifiers(如 Navigation Areas、Navigation Links 和动态对象)可以通过更改成本或块区域来修改现有 Navigation Mesh。 运行时不会生成新的导航网格表面。这种方法允许导航网格缓存碰撞数据,并且可以使受影响图块的处理成本降低 50%。高级用户应在仔细考虑其优点和限制后使用此模式。 Dynamic Modifiers Only设置实时生成方式。项目设置–>NavigationMesh–>Runtime Generation。 注意关卡中没有生成新的导航网格(正在生成的图块显示为红色)。 导航修改器只是更改现有的导航网格。 示例中,目前同时加RotatingMovement组件有效,单加NavModifier无效,原因未知。 Dynamic设置实时生成方式。项目设置–>NavigationMesh–>Runtime Generation。 Note: 强制生成具有高计算成本的导航网格。 三、自定义导航区域和查询筛选器 1. 自定义区域类(Nav Area)将NavModifierVolume拖动到关卡中。创建蓝图继承NavArea,命名为BP_Area_Neutral。打开BP_Area_Neutral,修改默认成本乘数和固定区域输入成本。选择颜色,编译并保存。 将创建好的NavArea添加到NavModifierVolume中的AreaClass里。 创建蓝图继承NavigationQueryFilter,命名为BP_QueryFilter1。打开BP_QueryFilter1,添加并修改Areas数组,加入上一步创建的AreaClass,重写通过成本, 由于BP_QueryFilter1 BP_Area_Lane2是最便宜的路线,因此Agent使用它来到达球体。 打开角色蓝图,选择Character Movement Component,导航到“角色移动:回避”部分,启用“UseRVOAvoidance”复选框,并将“回避考虑半径”设置为 100。 打开角色蓝图,将AIController替换为Detour Crowd AI Controller,运行即可。 也可以调整绕行人群管理器系统的多个设置,例如系统使用的最大代理数和用于避免计算的最大代理半径。 概述 这是一种仅围绕特定目标本地构建导航的方法。 在Actor上添加Navigation Invoker组件,用于在运行时围绕代理生成导航网格。此方法不再需要在编辑器中构建导航网格,还可以限制在运行时生成的切片数。非常适合在编辑器中构建导航网格不切实际的大型关卡。 设置 向关卡中拖入导航网格。项目设置–>NavigationSystem—>启用 Generate Navigation Only Around Navigation Invokers。项目设置–>NavigationMesh—>Runtime Generation—>Dynamic。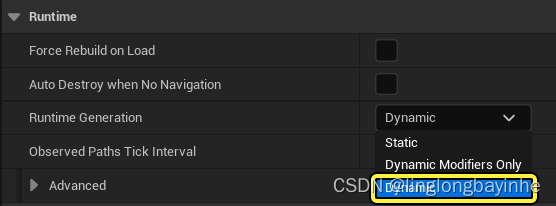 4.添加组件Navigation Invoker。打开细节面板,根据需求更改切片生成半径(用于生成导航网格切片的参与者周围的半径)和切片删除半径(用于删除导航网格切片的参与者的半径)。 4.添加组件Navigation Invoker。打开细节面板,根据需求更改切片生成半径(用于生成导航网格切片的参与者周围的半径)和切片删除半径(用于删除导航网格切片的参与者的半径)。 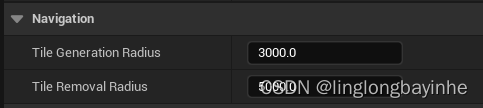 效果如下: 效果如下:  六、优化导航网格生成速度
六、优化导航网格生成速度
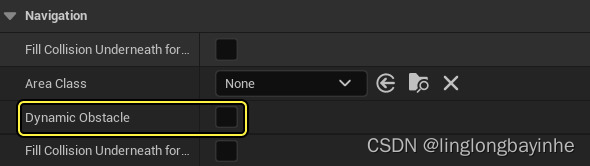
Note: 最新版本可在引擎中找到。目录如下:Engine\Source\Runtime\NavigationSystem\DevDocs\How To Optimize Navmesh Generation.md 导航系统提供了各种设置,高级用户可以使用这些设置来修改关卡中导航的计算方式。 1. 建议 1.1 尽可能使用最高Cell Size和Cell HeightCell Size和Cell Height定义了用于生成导航切片的体素大小(Cells)。体素越小,获得的精度就越高,障碍物周围的导航就越准确。但是,体素越小,在运行时重新构建导航网格时需要的处理就越多。 Cell Size=19 Cell Size=64 因此,在Agent所需的精度下,CellSize尽可能调大。 1.2 限制Tile Size导航网格分为多个tiles,由于每个tiles都是从cells构建的,因此重新构建导航tiles将导致使用新的碰撞信息重新创建其所有cells。 较大的tiles包含更多的cells,重建成本高于较小的tiles。但是,在处理tiles时,系统还会处理其边缘上的连续cells。在设置切片大小时,应考虑此开销成本,因为在某些情况下,处理许多较小tiles的开销成本可能大于重建单个大型tiles的成本。 建议:tiles大小应设置为每侧 32 到 128 个cells之间。这将在运行时重建tiles时提供最佳性能。 即Cell Size=64时,TileSizeUU>2048 (6432),且TileSizeUUNavigationSystem中的MaxSimultaneousTileGenerationJobsCount来控制多线程导航网格的生成。请注意,这受到 FRecastNavMeshGenerator::Init()中工作线程总数的限制。 将动态障碍物与全动态导航网格生成结合使用 您可以将关卡中的Actor标记为动态障碍物,Actor需要有Collision组件。动态障碍物标记需要重建生成的导航网格表面。这可以防止重新生成整个导航tiles。 使用此方法比生成完整的导航tiles成本更低,当移动障碍物顶部不需要导航网格表面时,应使用此方法。 用法猜测,当Actor顶部有导航网格,却不想用时,添加Collision组件,将AreaClass改成NavArea_Null,再启用DynamicObstacle。这样Actor顶部的导航网格就去掉了。 将数据块流用于在子关卡中加载的静态导航网格体 如果对导航网格体的唯一更改来自加载和卸载子关卡,则可以将导航网格体生成方法设置为静态并使用 NavMesh 数据块流式处理,而不是使用动态导航网格体。 使用此方法,导航网格将在编辑器中完全构建,并且只有相关部分将在运行时loaded in and out。 七、世界分区静态导航网格体世界分区静态导航网格体(官方链接) |
 逻辑:
逻辑: 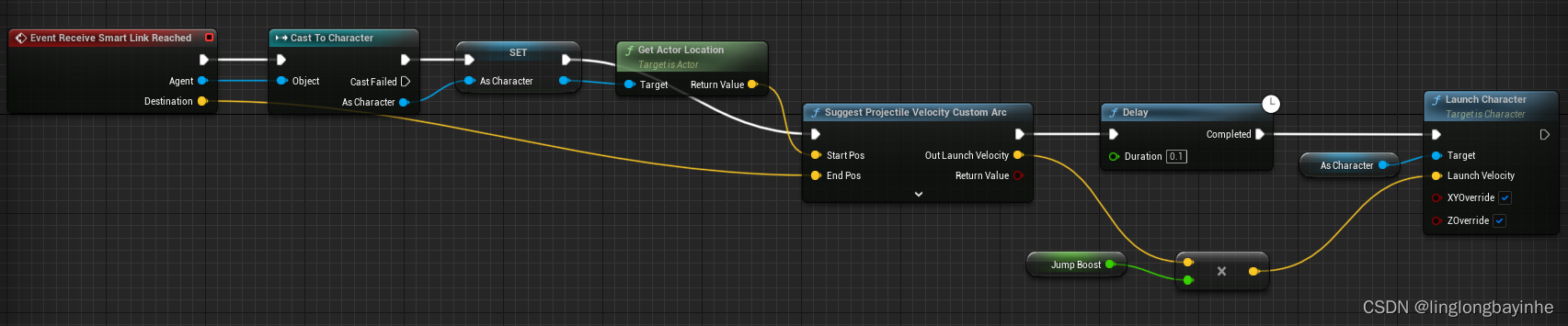
 只有当Actor拥有NavModifier组件时有效。
只有当Actor拥有NavModifier组件时有效。 


 效果如下
效果如下 
【本文地址】