串口通信(二) |
您所在的位置:网站首页 › 如何发快件查询步骤 › 串口通信(二) |
串口通信(二)
|
本文为博主 日月同辉,与我共生,csdn原创首发。希望看完后能对你有所帮助,不足之处请指正!一起交流学习,共同进步! > 发布人:@日月同辉,与我共生_单片机-CSDN博客 > 欢迎你为独创博主日月同辉,与我共生点赞❤❤❤+关注👍+收藏🌹+评论☺。 系列专栏:CSDN-单片机学习系列🎁 > 我的格言是:“尽最大努力,做最好的自己!💪 版权声明:本文为CSDN博主「日月同辉,与我共生」的原创文章,CSDN独一份。
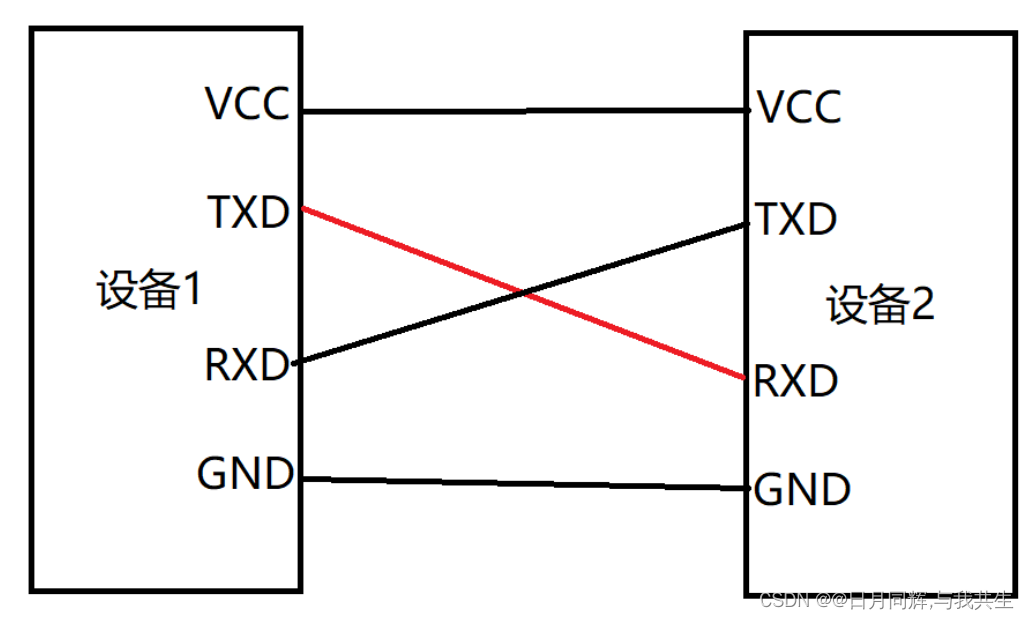
目录 一、项目设计 1.1功能说明 1.2硬件设计 1.2.1硬件接线原理 1.2.2仿真图 1.2.3com1、com2和com3 1.3计算初值 二、查询法 2.1查询法原理 2.2查询法--初始化 2.3主程序1 三、中断法 3.1中断法--初始化 3.2中断服务函数 3.3主程序2 四、项目结果 4.1查询法 4.2中断法 五、提供完整代码 5.1查询法 5.2中断法 一、项目设计 1.1功能说明三台设备(51单片机、串口元件COMPIM、虚拟串口),各自标记为com1、com2、com3。单片机com1发送数据“0”/0x00给com2,com2再发送给com3。此外,虚拟终端设备能接收到单片机com1发送来的数据“0”/0x00。 1.2硬件设计 1.2.1硬件接线原理两个设备间的连接,遵循设备1发送端TXD接设备2接收端RXD,设备1接收端RXD接设备2发送端TXD。
由于单片机com1发送的数据,最终由com3接收,而不是com2接收,所以com1与com2的连接无需遵循1.2.1的接线原则。
单片机(com1):用到晶振频率fosc=11.0592MHZ。 COMPIM(com2):串口元件。可以调节波特率和数据位数等属性。为了让大家更好地理解,查询法波特率设置为4800bit/s,中断法波特率设置为9600bit/s。
虚拟串口(com3):需要下载虚拟串口软件,将com2与com3这两设备相连接,最后在串口助手看到接收到的结果。 虚拟串口:
串口助手:需要与com2虚拟波特率设置的一样,否则接收到的数据是错误的。在proteus开始调试时,要在串口助手点击打开串口,才能接收到数据,接收到的数据会在接收缓冲区里显示,结果有两种模式,一种是文字模式,另一种是十六进制模式。
波特率为4800bit/s,采用工作方式1,初值结果为250,十六进制为0xFA。
波特率为9600bit/s,采用工作方式1,初值结果为253,十六进制为0xFD。
串口发送标志位TI,TI=0,准备发送;TI=1,发送完成。当数据没发送完成前,TI=0,发送完成TI会自动置1,不要忘记将TI清0,以便下次能够继续发送数据。 2.2查询法--初始化初始化时,要设置寄存器SCON(工作方式、是否多机通信、数据位数),REN一般要接收(置1),初值就是定时初始值TH1/定时重载值TL1,工作方式为方式1(8位异步重载),波特率可变,因为是8位数据传输,所以定时器为定时器T1工作方式为方式2。中断法设置同上。 M0 M1 M2 REN TB8 RB8 TI RI 0 1 0 1 0 0 0 0 void UartInit() //[email protected] { SCON = 0x50; //8位数据,可变波特率 TMOD &= 0x0F; //设置定时器模式 TMOD |= 0x20; //设置定时器模式 TL1 = 0xFA; //设置定时初始值 TH1 = 0xFA; //设置定时重载值 ET1 = 0; //禁止定时器中断 TR1 = 1; //定时器1开始计时 } 2.3主程序1语句SBUF='0';是发送数据‘0’,而接收语句是‘0’=SBUF; 发完数据后,TI要清0。 #include #include "delay.h" void UartInit();//串口初始化函数声明 void main() { UartInit();//调用串口初始化函数 while(1) { SBUF = '0';//发送一帧数据 while(!TI);//等待发送完成(TI会自动置1) TI=0;//将TI置0 delay(1000);//延时1s } } 三、中断法 3.1中断法--初始化中断法:除了设置SCON、TNOD、初值外,还要打开总中断EA=1,串口中断开关ES=1和定时器启动位TR1=1。 void UartInit(void) //[email protected] { PCON &= 0x7F; //波特率不倍速,这语句有没有无所谓,默认波特率倍数为1 SCON = 0x50; //8位数据,可变波特率 TMOD &= 0x0F; //设置定时器模式 TMOD |= 0x20; //设置定时器模式 TL1 = 0xFD; //设置定时初始值 TH1 = 0xFD; //设置定时重载值 ET1 = 0; //禁止定时器中断 ES=1; EA=1; TR1 = 1; //定时器1开始计时 } 3.2中断服务函数当发送完成时,TI自动置1,触发一次中断。 void ES_timer() interrupt 4 //当TI置1时,会进入中断服务函数 { if(TI) { TI=0;//TI软件置0 } } 3.3主程序2SBUF=0x00;发送数据0x00。 void main() { UartInit();//调用串口初始化函数 while(1) { SBUF=0x00;//发送数据0x00 delay(2000);//延时2s } } 四、项目结果 4.1查询法由于使用查询法,com1发送字符‘0‘,所以选择文本模式。
虚拟串口终端:如何每发送一个字符后换行呢?下文会讲解!
由于发送的是十六进制0x00,所以选择HEX模式。
虚拟串口终端:
Hi!我叫不白吃。 下一文将着重讲述printf串口输出重定向的实现及一帧一串数据的发送,亲爱的读者敬请期待, 下一文更精彩!!! 腹有诗书气自华,读书万卷始通神。我叫不白吃,喜欢我的,可以支持我,博主名叫@日月同辉,与我共生 |











【本文地址】
今日新闻 |
推荐新闻 |