|
👉👉👉**无人机硬件,提供全程指导**👈👈👈
文章目录
==👉👉👉**[无人机硬件,提供全程指导](https://item.taobao.com/item.htm?spm=a1z10.1-c.w137644-23632941727.26.118775c2oUPAnL&id=688860713104)**👈👈👈==前言一、天地飞ET07遥控器二、富斯I6S三、思翼MK151.天空端接线2.连接QGC地面站3.设置视频流。
四、MC6C五、云卓H16接线通信设置视频设置向云卓H16传输文件连接电脑版QGC使用海康威视网口摄像头
六、乐迪AT9S PRO对码设置接收机输出模式
七、云卓T108、云卓H12 PRO
前言
固件:PX4 1.11以上版本 飞控:PIXHAWK或者雷迅飞控
一、天地飞ET07遥控器
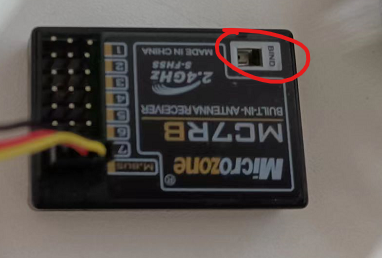
飞控pix4 ,接收机RF207S
将接收机的8通道接到飞控的DSM/SBUS RC接口,此时接收机的灯是红的,如下
 长按接收机上的按钮,直至接收机黄灯快闪,如下 长按接收机上的按钮,直至接收机黄灯快闪,如下
此时打开遥控器,首先恢复出厂设置 点击系统设置->出厂设置->恢复出厂设置,如下

点击通信设置->对码->开始,如下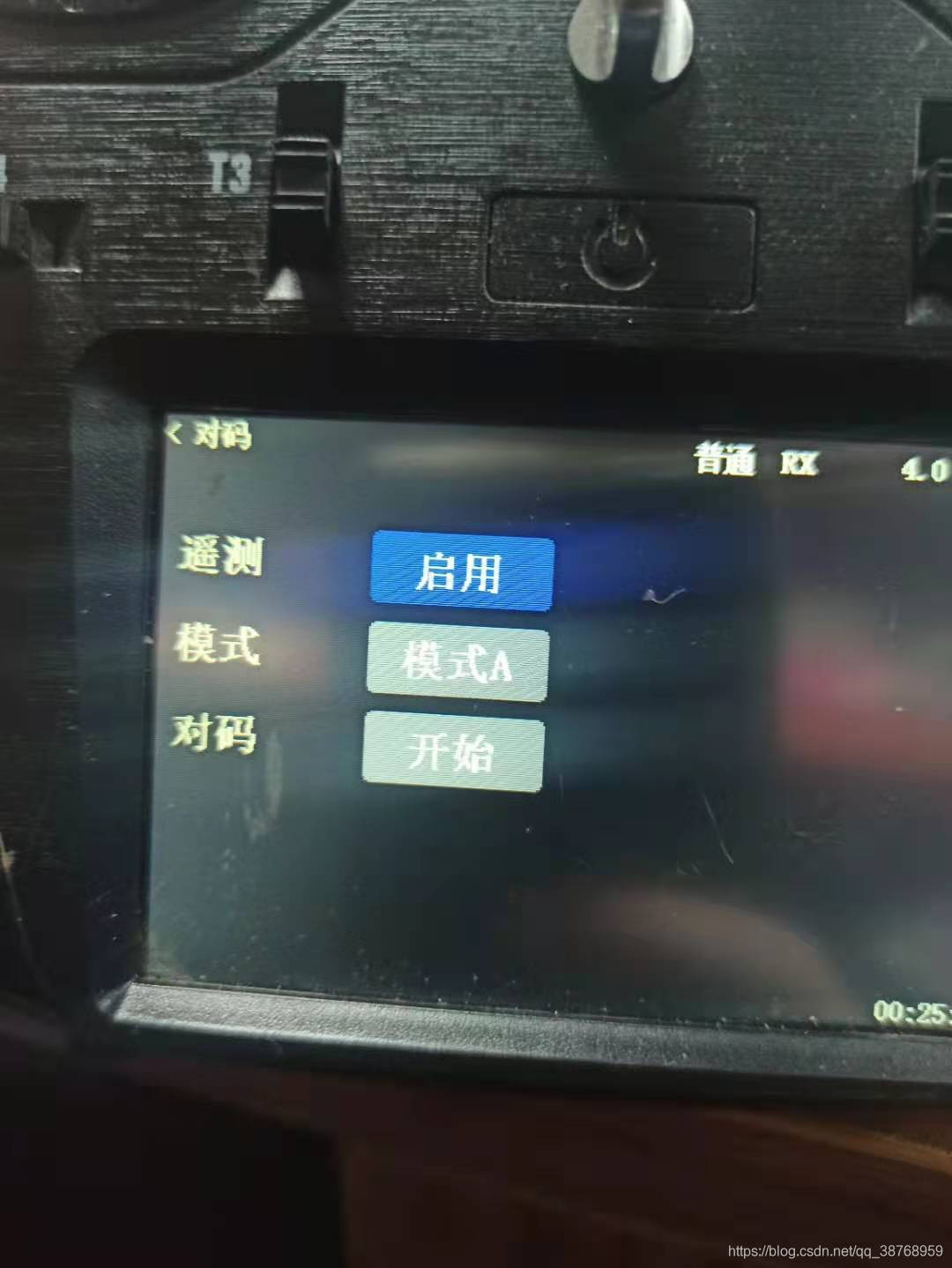
对码成功后如下
 设置通信模式为sbus模式, 点击通信设置->PPM/W.BUS,选择W.BUS,如下 设置通信模式为sbus模式, 点击通信设置->PPM/W.BUS,选择W.BUS,如下 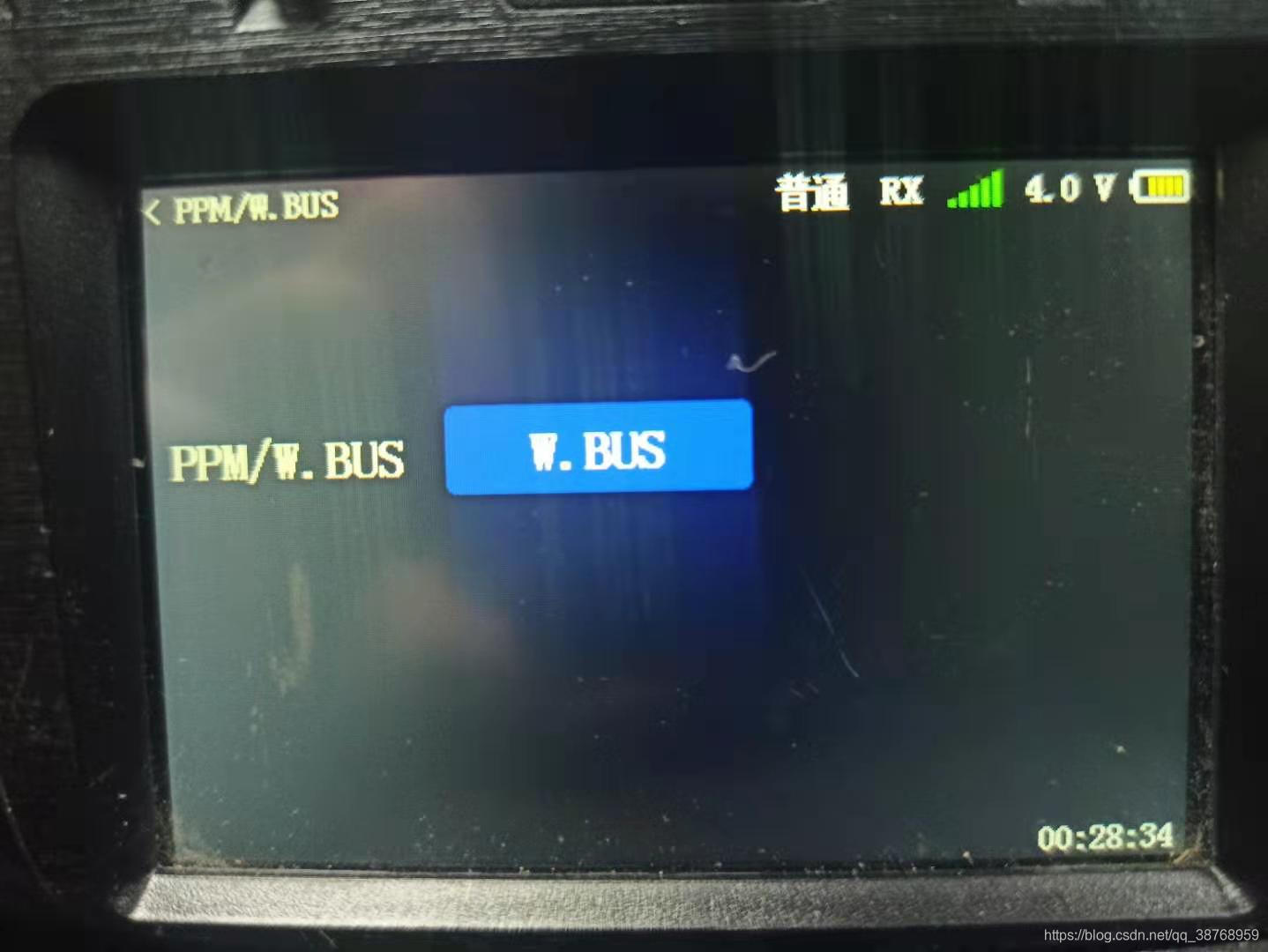
设置摇杆模式为模式2 点击系统设置->摇杆模式,选择2,如下 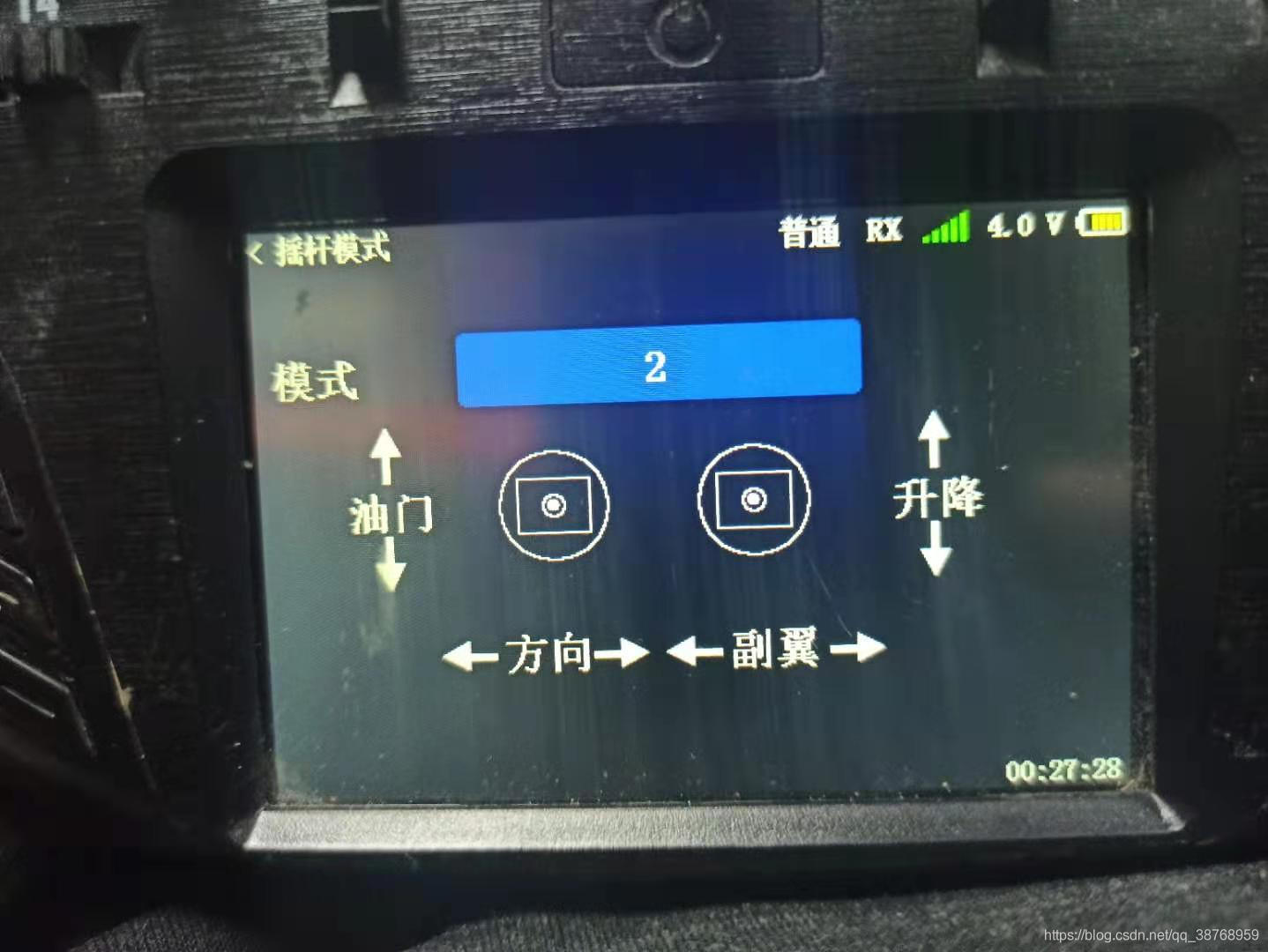
设置辅助通道, 点击通用功能->辅助通道,设置如下  遥控设置完毕后,将飞控连接地面站,打开遥控器页面。如下表示已经识别到遥控器,可以校准遥控器 遥控设置完毕后,将飞控连接地面站,打开遥控器页面。如下表示已经识别到遥控器,可以校准遥控器
 校准完毕后设置一下辅助通道,如下 校准完毕后设置一下辅助通道,如下
二、富斯I6S
遥控器对码 用杜邦线将B/VCC口的S和GND短接  然后给接收机上电,此时接收机红灯快闪 然后打开遥控器,点击功能->对码 然后给接收机上电,此时接收机红灯快闪 然后打开遥控器,点击功能->对码
正常的话遥控器会提示对码成功,接收机变为红灯常亮,表示已经对码成功. 接收机与飞控连接  将接收机的PPM/CH1接到飞控的PPM RC上(不要接到DSM/SBUS RC上,不然识别不到) 遥控器的系统->输出模式->输出设置为PPM 将接收机的PPM/CH1接到飞控的PPM RC上(不要接到DSM/SBUS RC上,不然识别不到) 遥控器的系统->输出模式->输出设置为PPM  然后打开遥控器,将飞控上电连接到地面站,正常的话可以在地面站上看到遥控器的通道值 然后打开遥控器,将飞控上电连接到地面站,正常的话可以在地面站上看到遥控器的通道值  设置辅助通道 默认情况下富斯遥控器的辅助通道都是禁用的,也就是说只有四个摇杆的通道是可以识别的,其他的拨码开关等通道是识别不到的,因此需要设置辅助通道 点击功能->辅助通道 设置辅助通道 默认情况下富斯遥控器的辅助通道都是禁用的,也就是说只有四个摇杆的通道是可以识别的,其他的拨码开关等通道是识别不到的,因此需要设置辅助通道 点击功能->辅助通道  如下 如下  点击"无"左边的禁用标志,选择通道类型为开关 点击"无"左边的禁用标志,选择通道类型为开关  设置为相应的拨码开关 设置为相应的拨码开关  通道5就设置完成了,以此类推设置其他通道即可. 如果想设置其他拨码开关就点击SwA,在弹出的提示框选择其他开关. 通道5就设置完成了,以此类推设置其他通道即可. 如果想设置其他拨码开关就点击SwA,在弹出的提示框选择其他开关. 
三、思翼MK15
思翼MK15使用说明书 https://download.csdn.net/download/qq_38768959/86003652
1.天空端接线
天空端的端口定义如下: 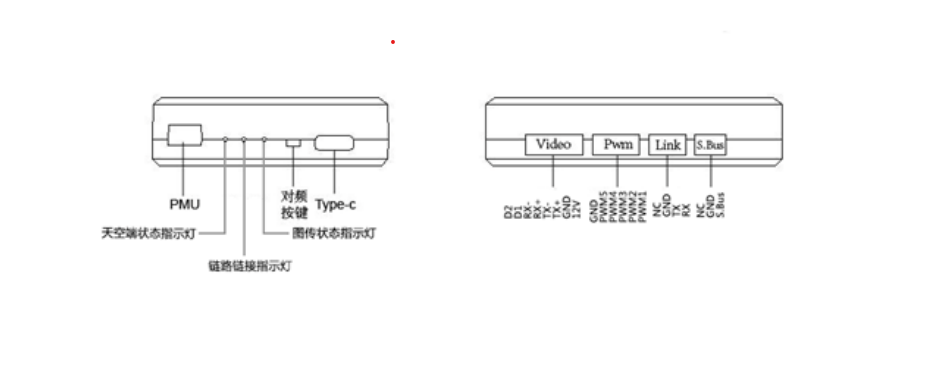 其中Video口接原装的摄像头,PWM可以不接,Link口接飞控的数传口,我这里接的是飞控的TELEM1口,接TX,RX,GND三根线即可,S.BUS口接飞控的SUBS接收机口,雷迅X7(PDB电流计)的话就是下面的两个口。 其中Video口接原装的摄像头,PWM可以不接,Link口接飞控的数传口,我这里接的是飞控的TELEM1口,接TX,RX,GND三根线即可,S.BUS口接飞控的SUBS接收机口,雷迅X7(PDB电流计)的话就是下面的两个口。 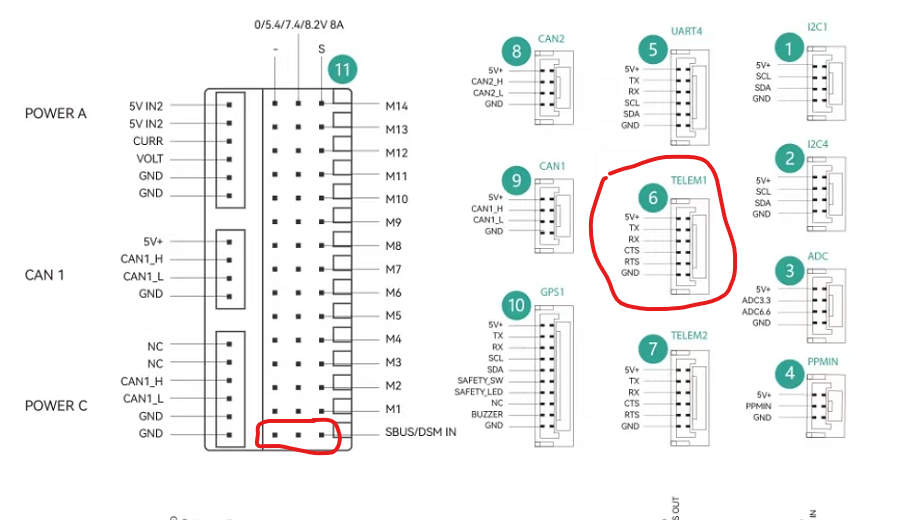
2.连接QGC地面站
思翼MK15自带安卓的系统,可以安装安卓版QGC,连接安卓版QGC的方法如下: 首先进入“思翼遥控”应用  打开数传设置,将连接方式设置为“UDP”连接,波特率与飞控的数传口的波特率一致 打开数传设置,将连接方式设置为“UDP”连接,波特率与飞控的数传口的波特率一致  打开 QGC 地面站软件,进入 QGC 的应用设置“Application Settings”菜单,点击“Comm Links”并增加“Add”一个新的连接方式,命名为“UDP”,将连接类型“Type”选为“UDP”,接口“Port”设置为“19856”,服务器地址“Server Addresses”输入“192.168.144.12”并增加 该服务器“Add Server”,然后点击“OK” 打开 QGC 地面站软件,进入 QGC 的应用设置“Application Settings”菜单,点击“Comm Links”并增加“Add”一个新的连接方式,命名为“UDP”,将连接类型“Type”选为“UDP”,接口“Port”设置为“19856”,服务器地址“Server Addresses”输入“192.168.144.12”并增加 该服务器“Add Server”,然后点击“OK” 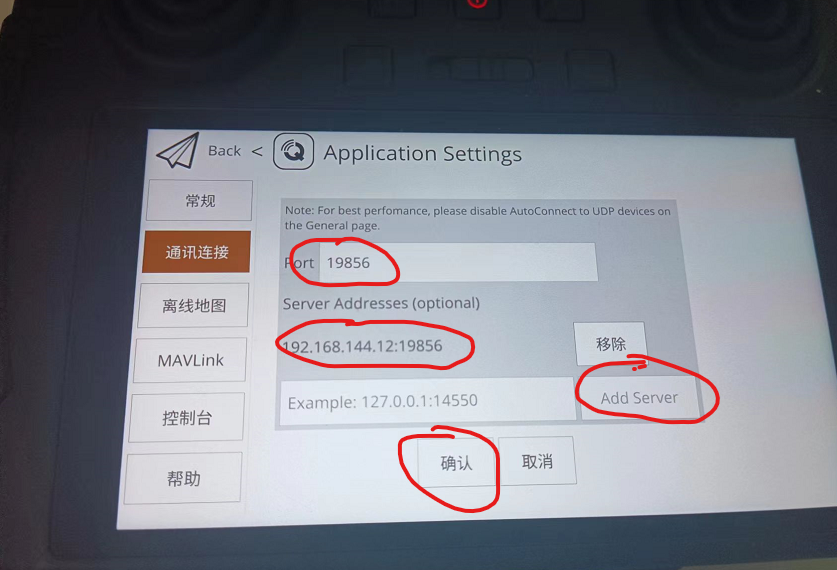 回到 Comm Links 菜单。 回到 Comm Links 菜单。 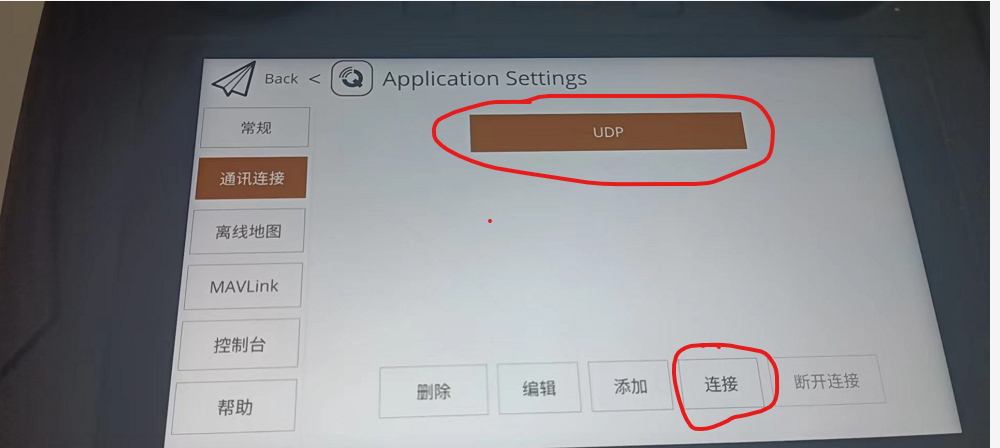 选择设置好的“UDP”连接方式并点击“Connect”,即可连接成功 如果点击连接后,地面站没有连接成功,可以进入“链路信息”菜单检查各项数值来判断飞控和 MK15 天空端是否正常通信。 正常通信时“数传下行”会大于 0。若数值为 0 ,说明没有收到飞控数据,检查天空端和飞控接线以及飞控数传端口波特率。如果大于0,检查QGC地面站的UDP设置。 选择设置好的“UDP”连接方式并点击“Connect”,即可连接成功 如果点击连接后,地面站没有连接成功,可以进入“链路信息”菜单检查各项数值来判断飞控和 MK15 天空端是否正常通信。 正常通信时“数传下行”会大于 0。若数值为 0 ,说明没有收到飞控数据,检查天空端和飞控接线以及飞控数传端口波特率。如果大于0,检查QGC地面站的UDP设置。 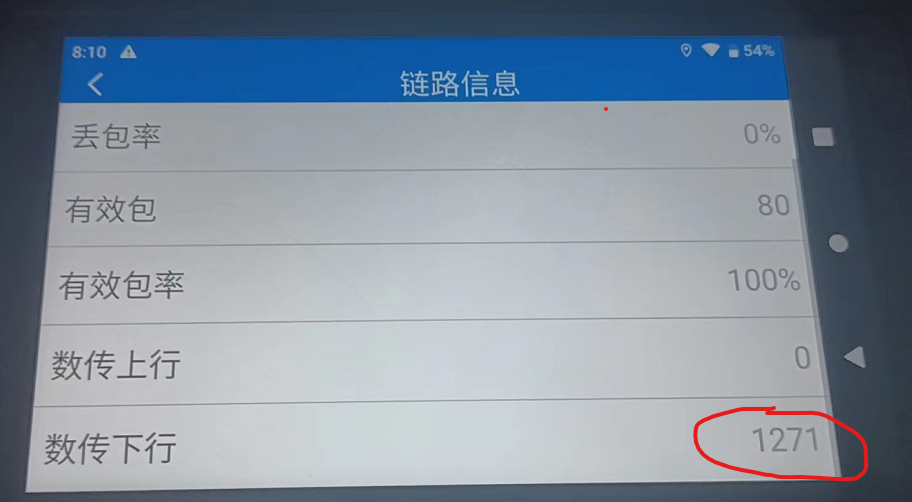
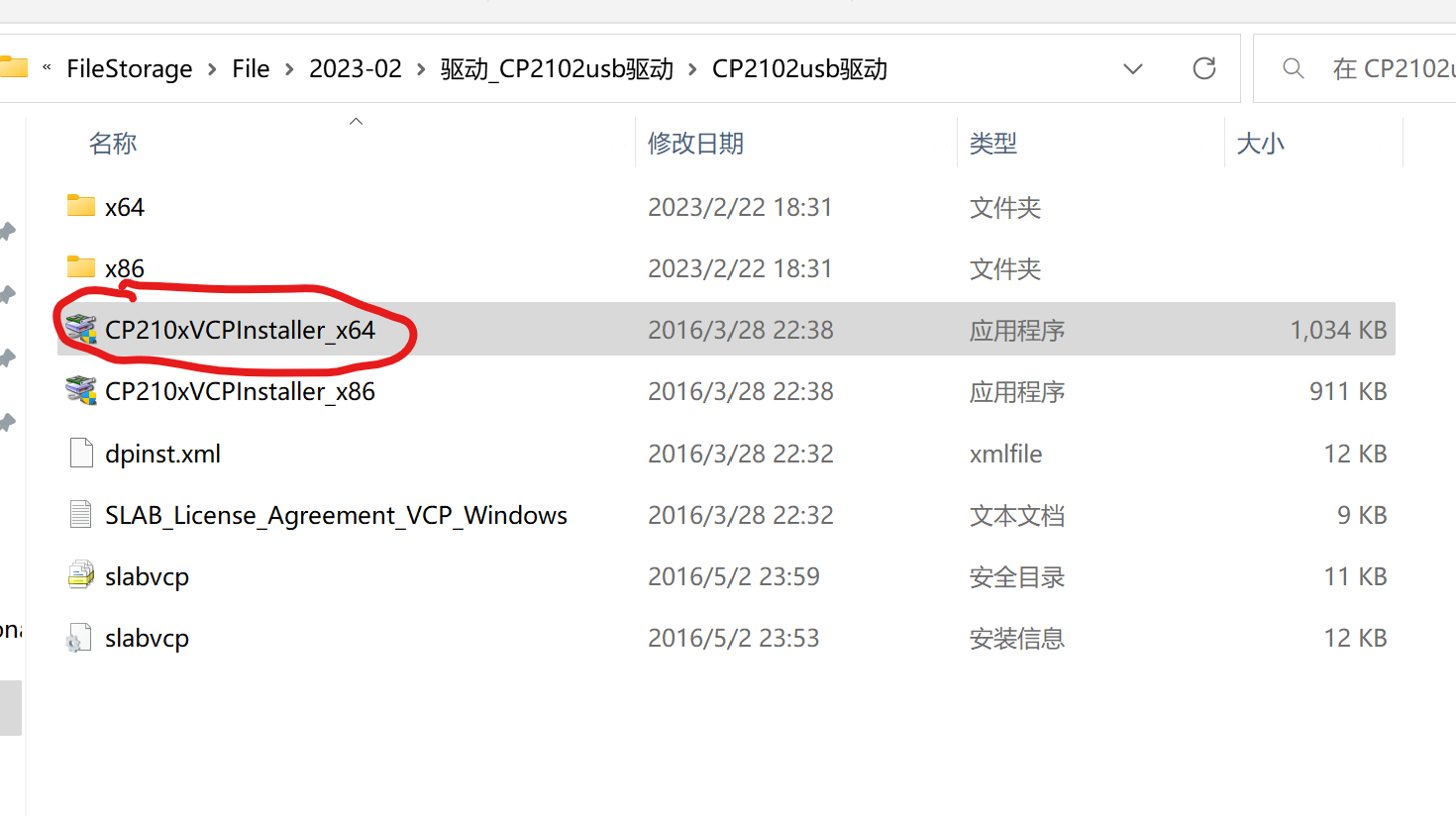
连接电脑版QGC 用配套的USB线,或者自己做一根线(普通的USB数据线的投资即可,不需要转成TTL) 线序入下,从左到右分别为D-,D+,-,+。 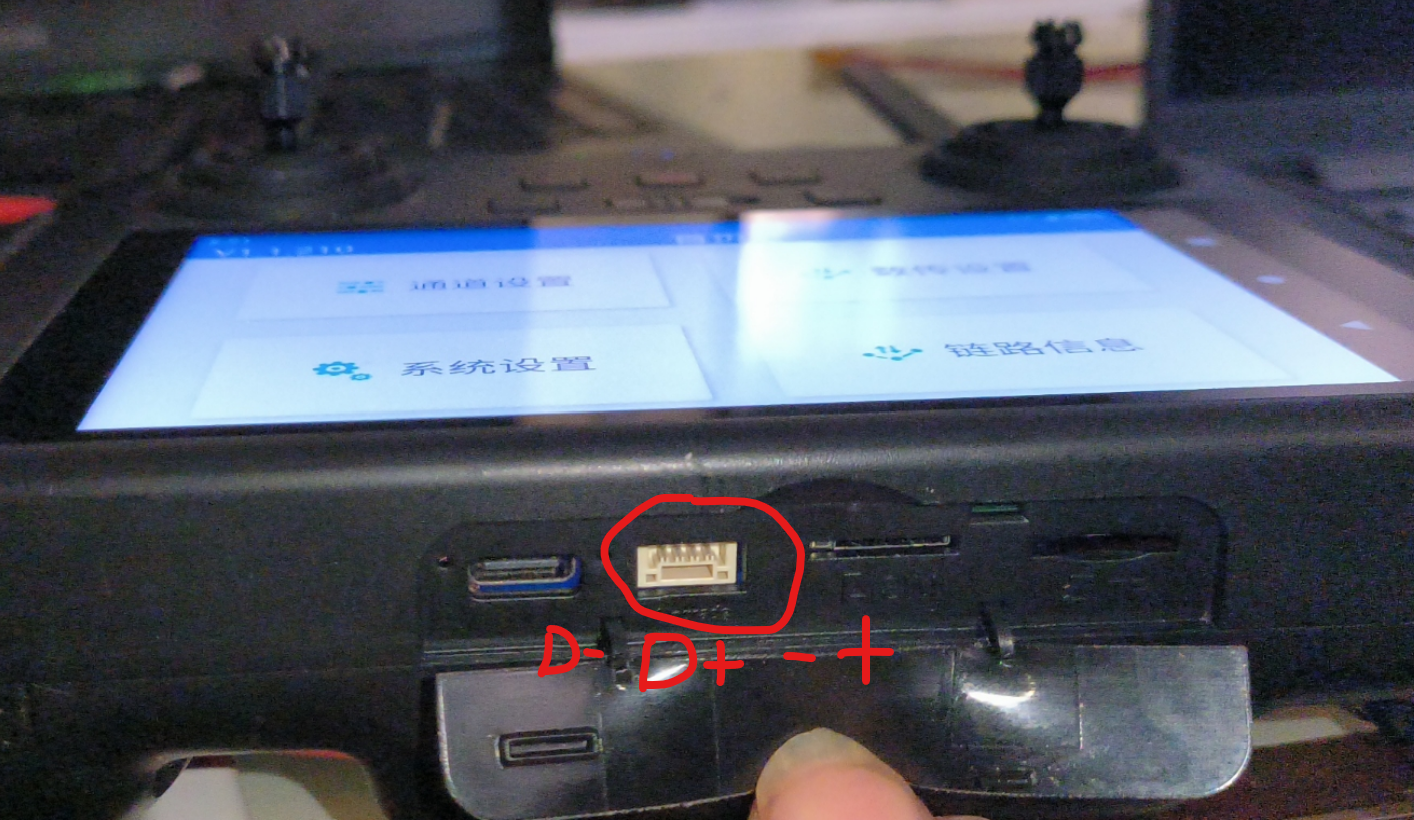 将遥控器底部的Upgrad口接到电脑后 打开设备管理器,会看到因为驱动原因,没法正常识别端口 将遥控器底部的Upgrad口接到电脑后 打开设备管理器,会看到因为驱动原因,没法正常识别端口 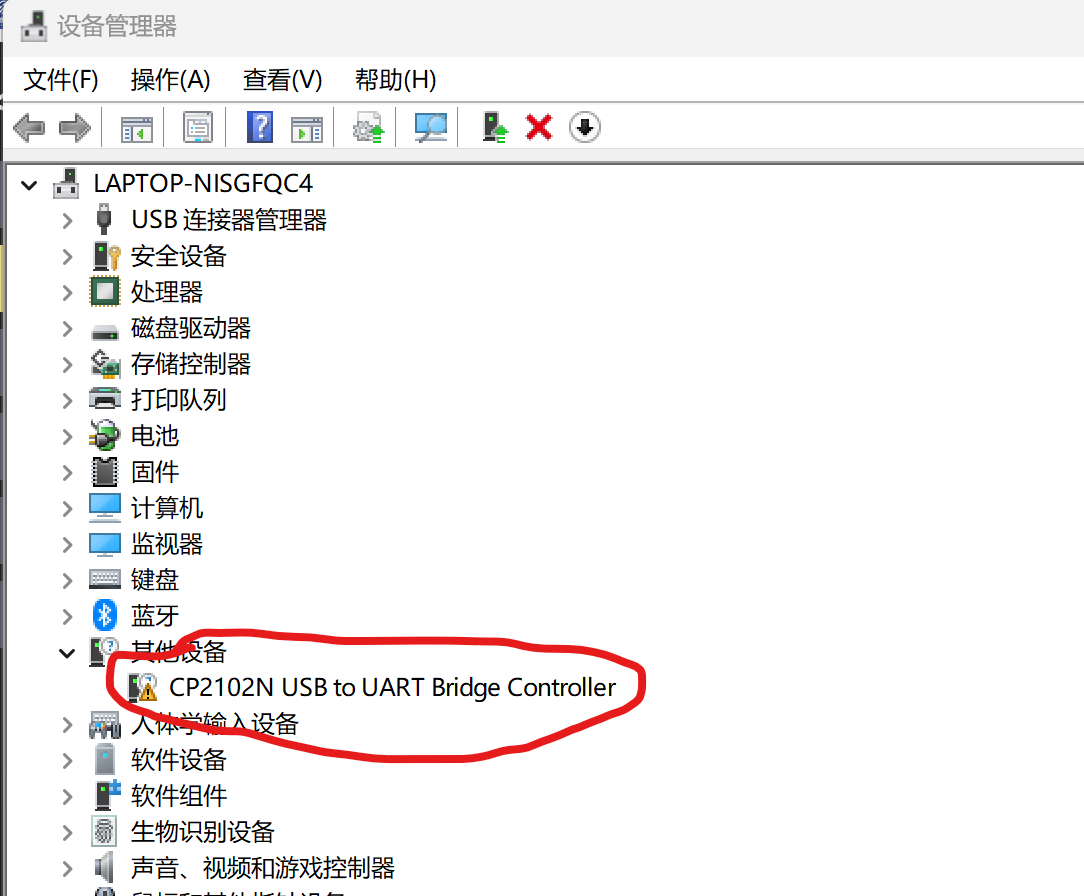 下载CP2102驱动 链接:https://pan.baidu.com/s/1VIEQwiP0ygj5AhIVnhdXrw 提取码:9cor –来自百度网盘超级会员V5的分享 先解压 然后安装,一般的64位电脑就安装x64版本 下载CP2102驱动 链接:https://pan.baidu.com/s/1VIEQwiP0ygj5AhIVnhdXrw 提取码:9cor –来自百度网盘超级会员V5的分享 先解压 然后安装,一般的64位电脑就安装x64版本
 安装完重新插一下USB 就可以正常识别了 安装完重新插一下USB 就可以正常识别了 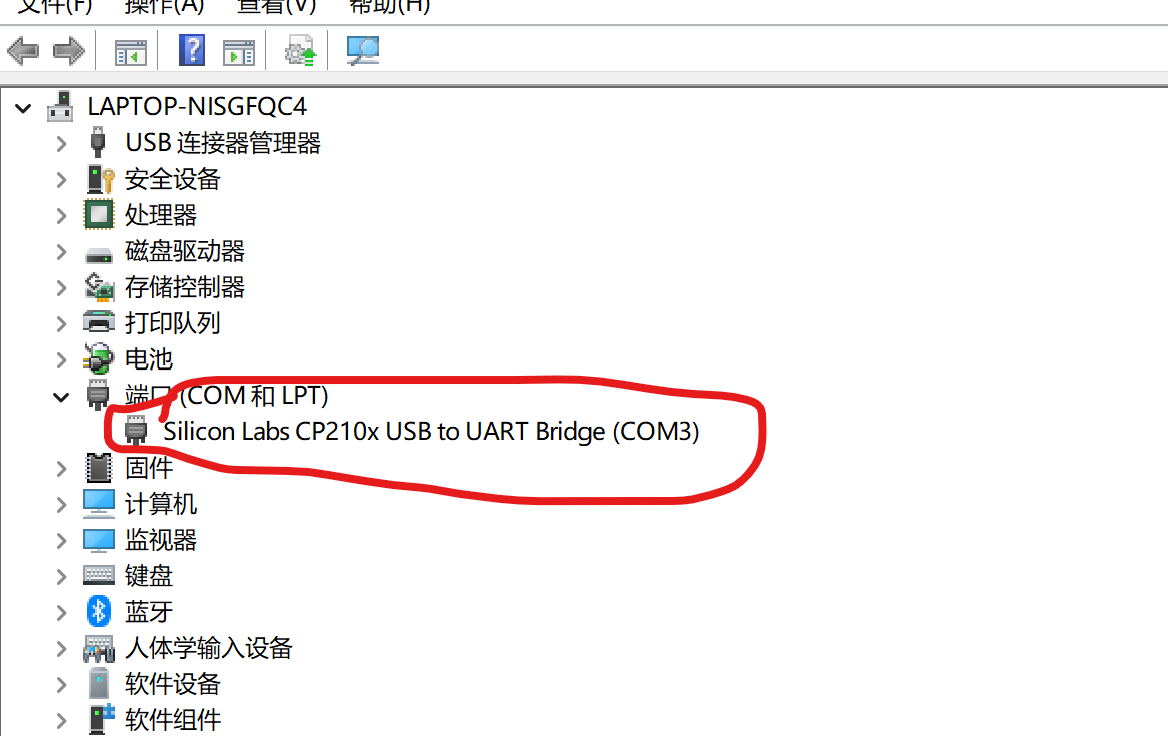 然后打开QGC,选择遥控器的端口,设置波特率115200,勾选开始时自动连接。设置完之后不要直接连接,重启地面站会自动连接上 然后打开QGC,选择遥控器的端口,设置波特率115200,勾选开始时自动连接。设置完之后不要直接连接,重启地面站会自动连接上 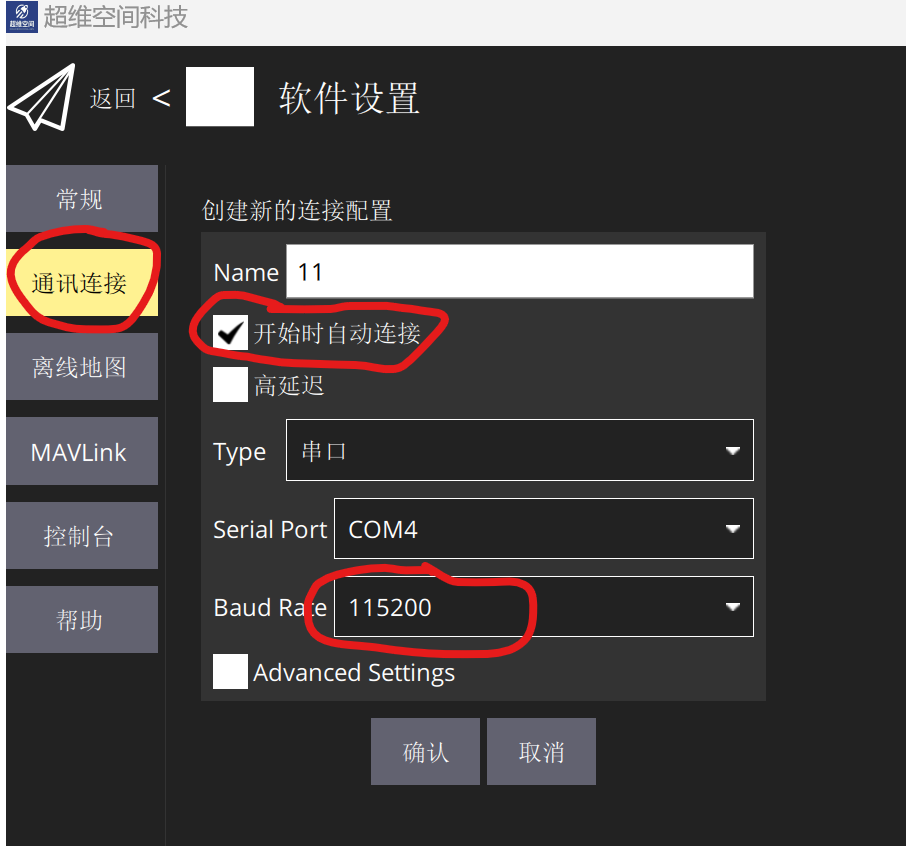
3.设置视频流。
将思翼摄像头接到天空端后,打开 QGC 地面站软件,进入通用设置菜单,(General)下滑到视频设置(Video Settings),将视频源(Source)选择为“RTSP Video Stream”,接着在下面的“RTSP URL”一栏填写网口相机或吊舱的 RTSP 地址。 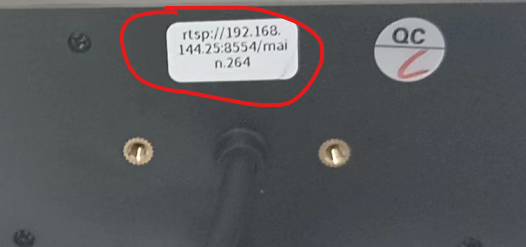 手动输入RTSP 地址容易输错,这里建议打开SIYI FPV 手动输入RTSP 地址容易输错,这里建议打开SIYI FPV  正常的话会显示摄像头的图像,点击图像右上角的三个点号, 正常的话会显示摄像头的图像,点击图像右上角的三个点号, 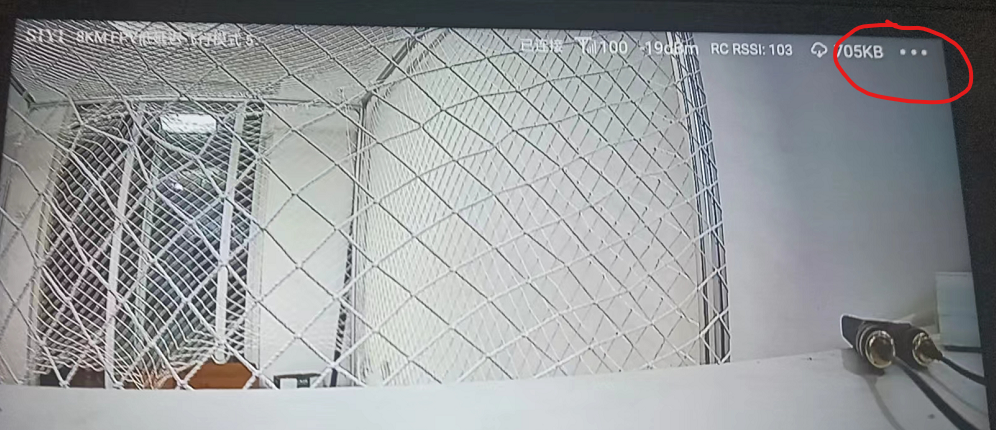 复制下图的地址 复制下图的地址 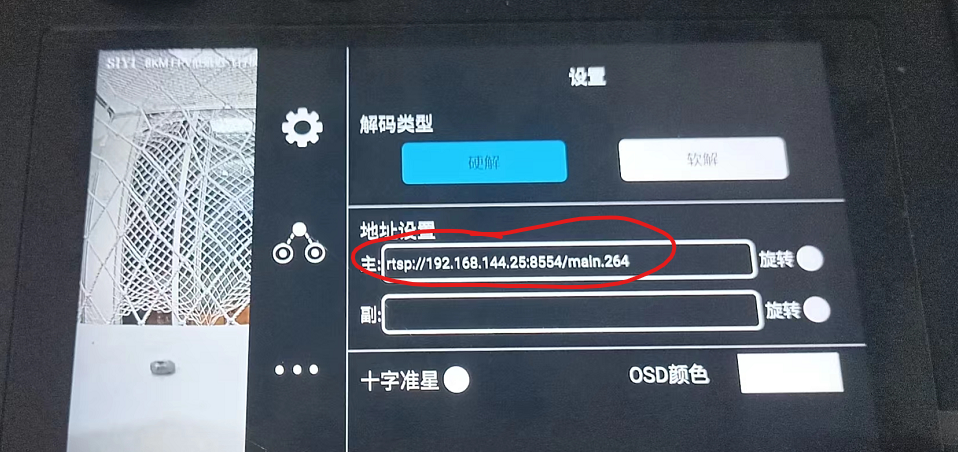
粘贴已经复制好的网口相机或吊舱的 RTSP 地址到QGC中。 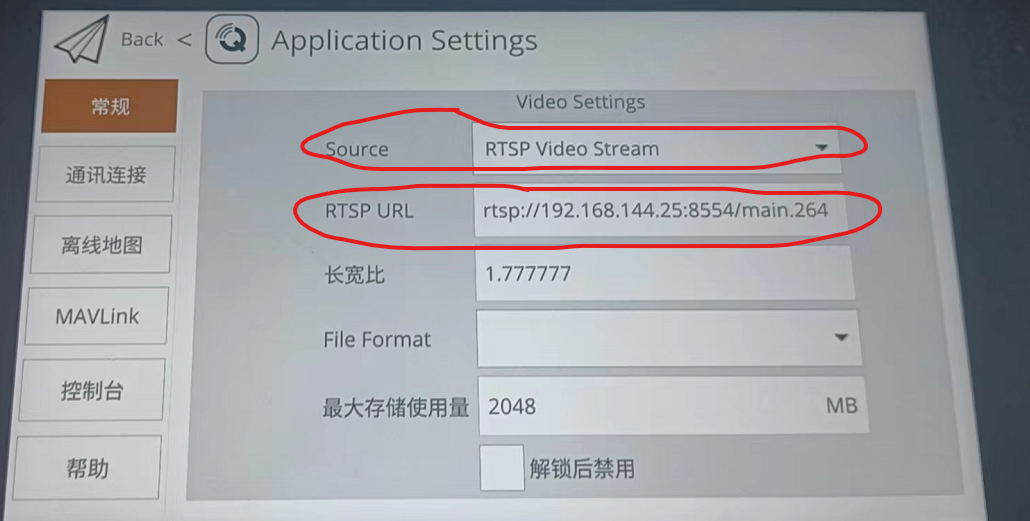 返回地面站主页即可查看图传显示。 返回地面站主页即可查看图传显示。 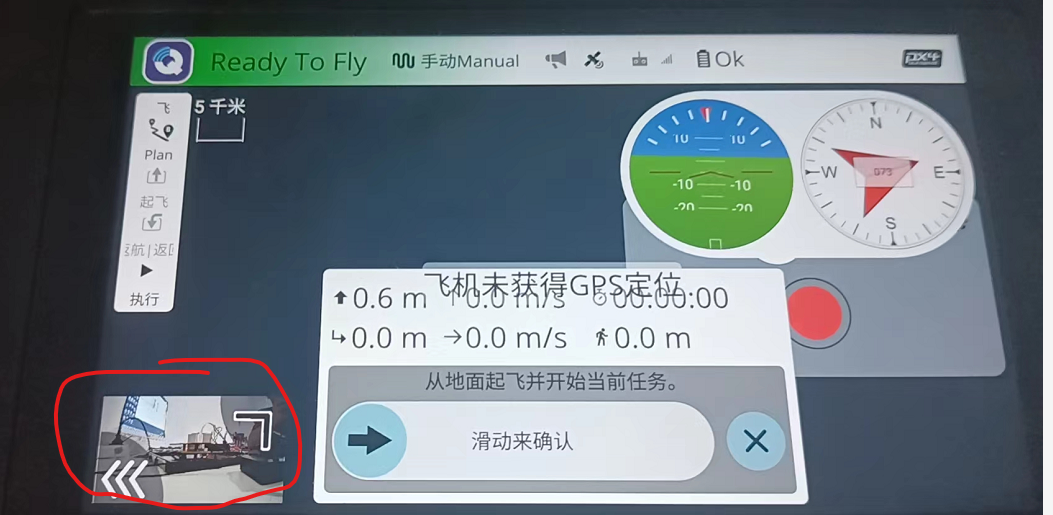
四、MC6C
1.对码 先关闭遥控器,把接收机的下面这个按钮长按一下,变成黄灯快闪,然后打开遥控器,变成黄灯长亮即为对码成功。
 2.与飞控接线 把接收机的M.sbus口接到飞控的SBUS口上即可 2.与飞控接线 把接收机的M.sbus口接到飞控的SBUS口上即可 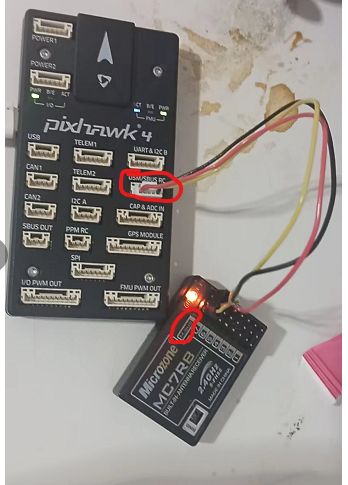
3.遥控器设置 对于接飞控不要通道混控的时候,把下图的遥控器设置开关全部拨到最下下面,否则可能出现通过混控  把遥控的这个拨码开关拨到上面(非初始位置),否则通道的行程量会变短 把遥控的这个拨码开关拨到上面(非初始位置),否则通道的行程量会变短 
五、云卓H16
说明书网盘链接: 链接: https://pan.baidu.com/s/1AcMVkGRPA2vZ2XPMJ28TXg 提取码: 2616 –来自百度网盘超级会员v5的分享 H16状态提示栏 
接线
将BATA+SBUS接到供电和飞控的SBUS接口,供电电压范围7.2~72V,将串口0接到飞控的TELEM1口,tx接rx,rx接tx,飞控TELEM1设置为数传口,波特率57600(其他波特率会连不上手机地面战). 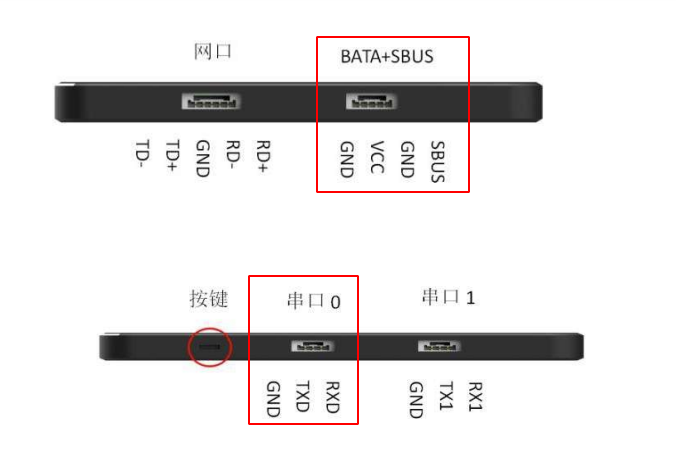
通信设置
打开遥控器,点击软件设置->通信连接->添加,添加如下连接 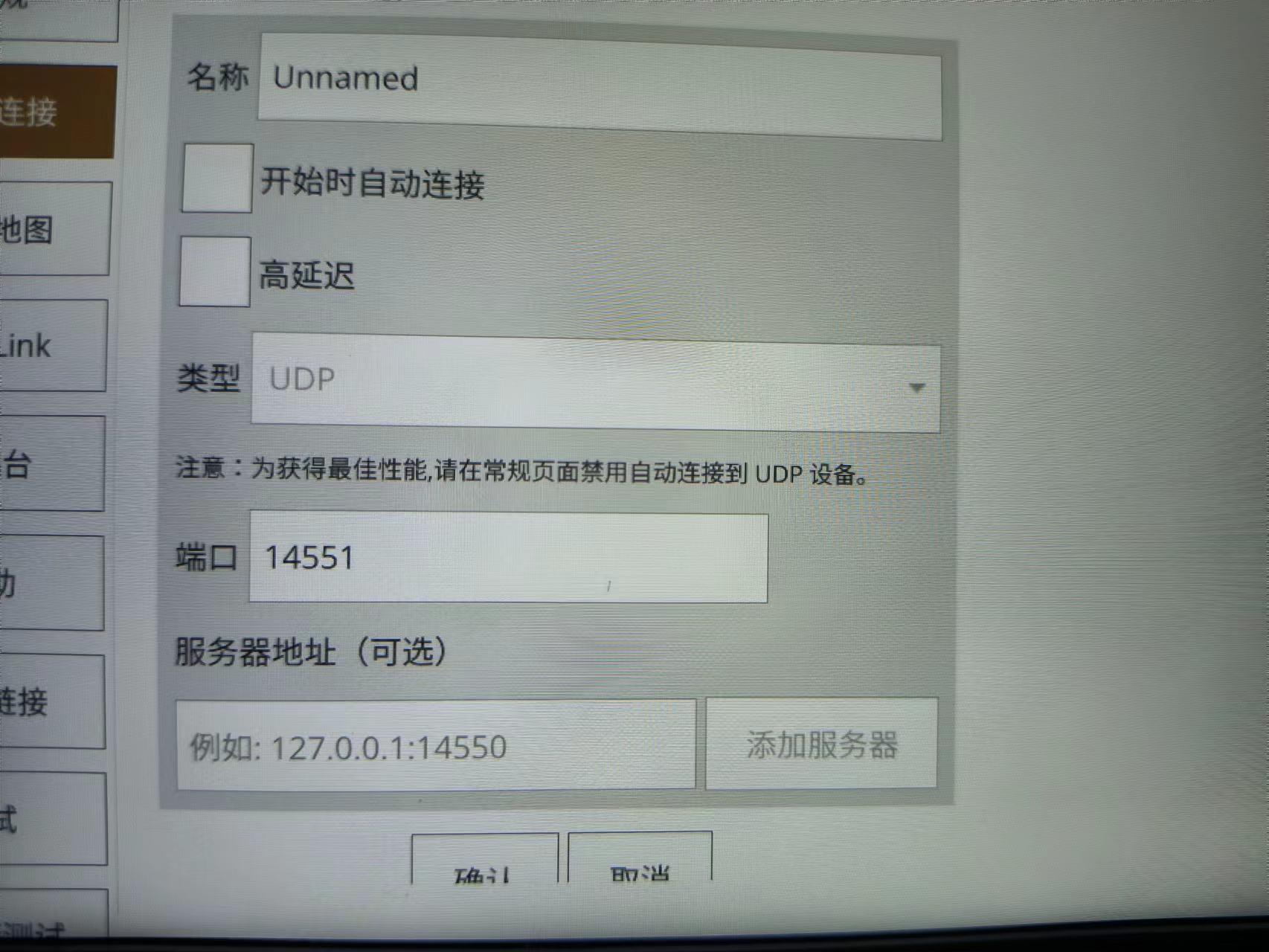 添加完后点击连接,即可连接上飞控 添加完后点击连接,即可连接上飞控
视频设置
打开H16助手,点击视频查看 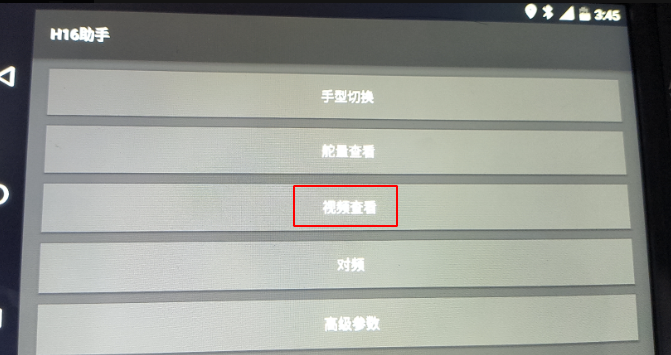 点击下方设置图标 点击下方设置图标  可以看到URL地址 可以看到URL地址 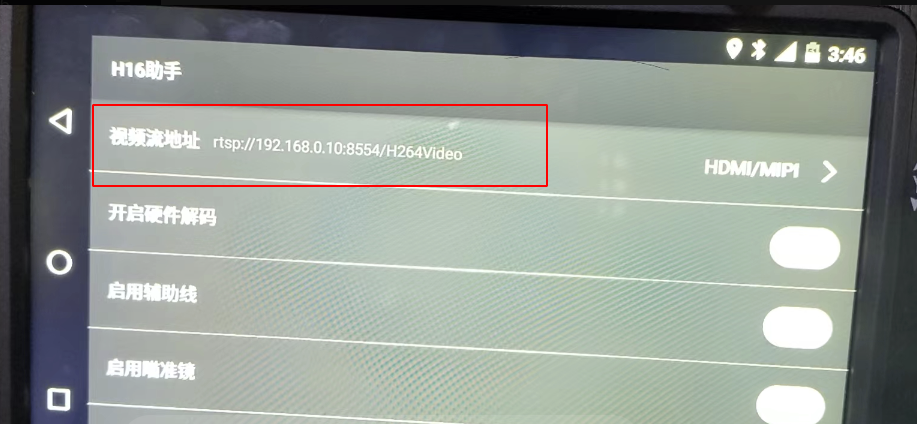 然后打开QGC->设置->常规,找到Video Settings,将Source设置为RTSP Video Stream,将RTSP URL设置为上面的视频流地址。 然后打开QGC->设置->常规,找到Video Settings,将Source设置为RTSP Video Stream,将RTSP URL设置为上面的视频流地址。 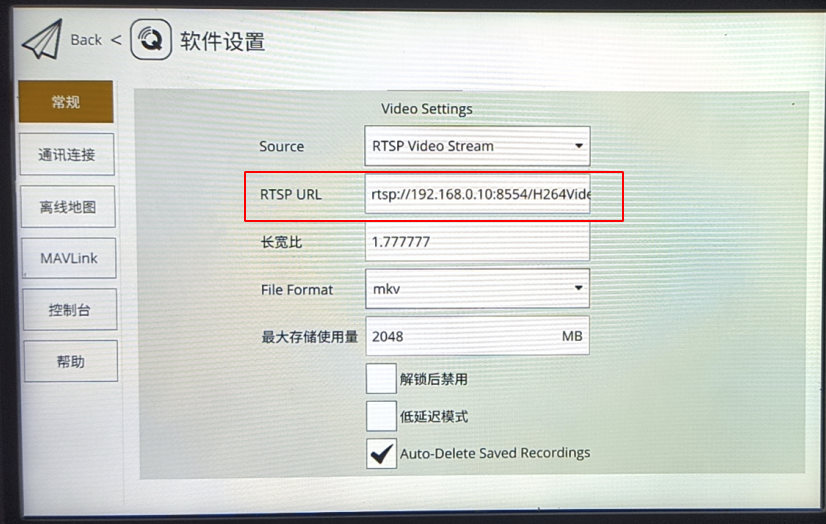 然后就可以在飞行视图页面看到视频: 然后就可以在飞行视图页面看到视频: 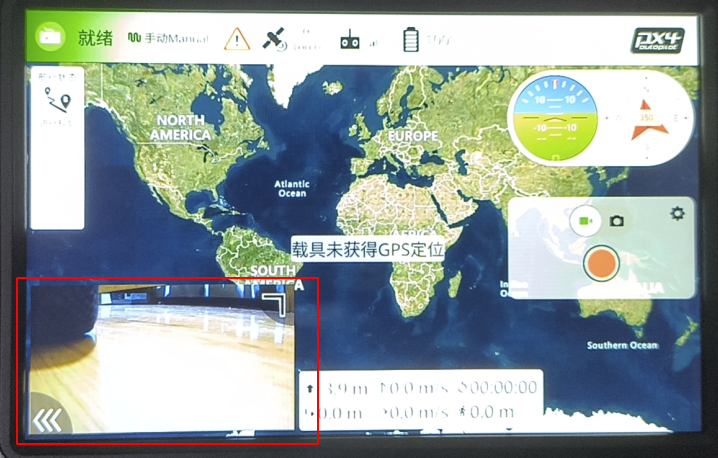 选择 选择
向云卓H16传输文件
用usb线连接H16和电脑 然后关闭USB调试 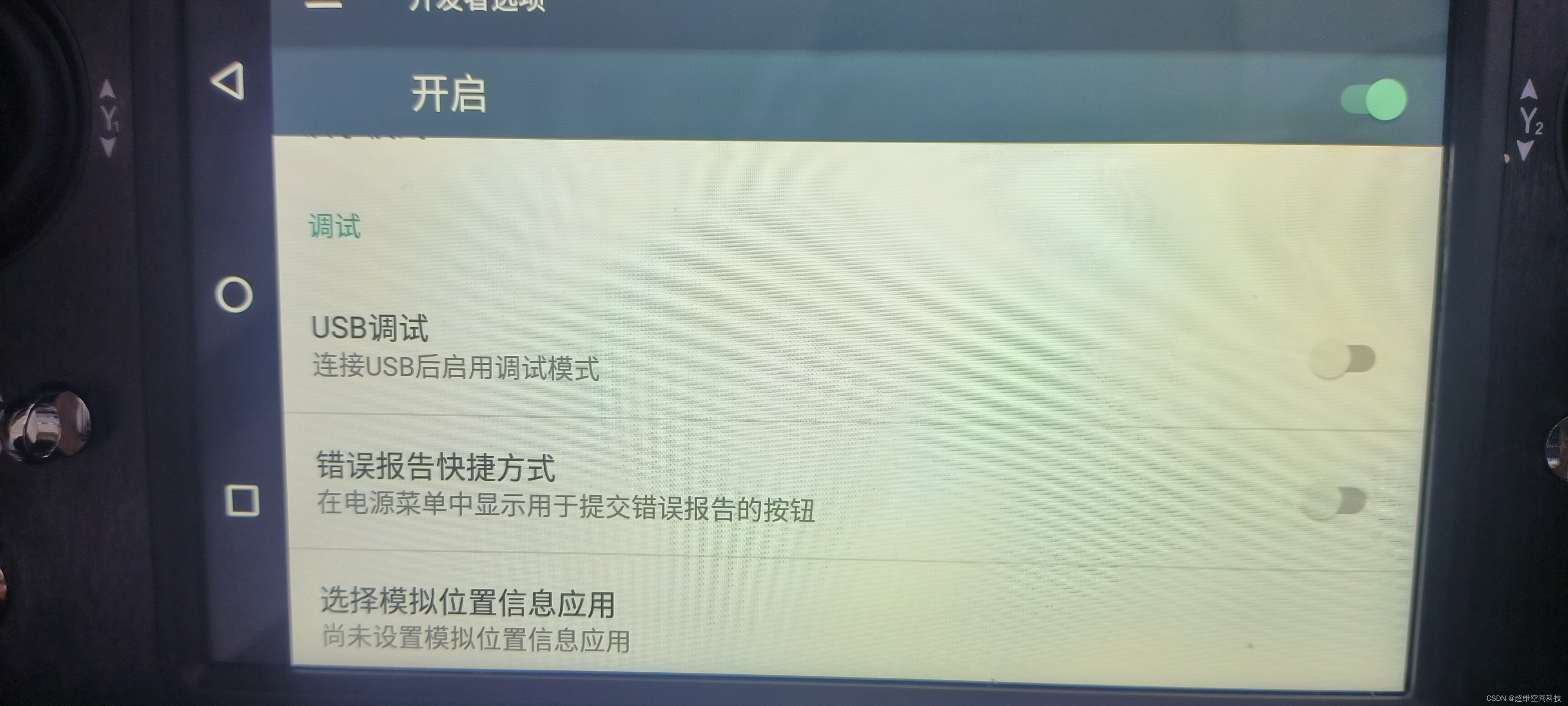 把USB配置为MTP 把USB配置为MTP 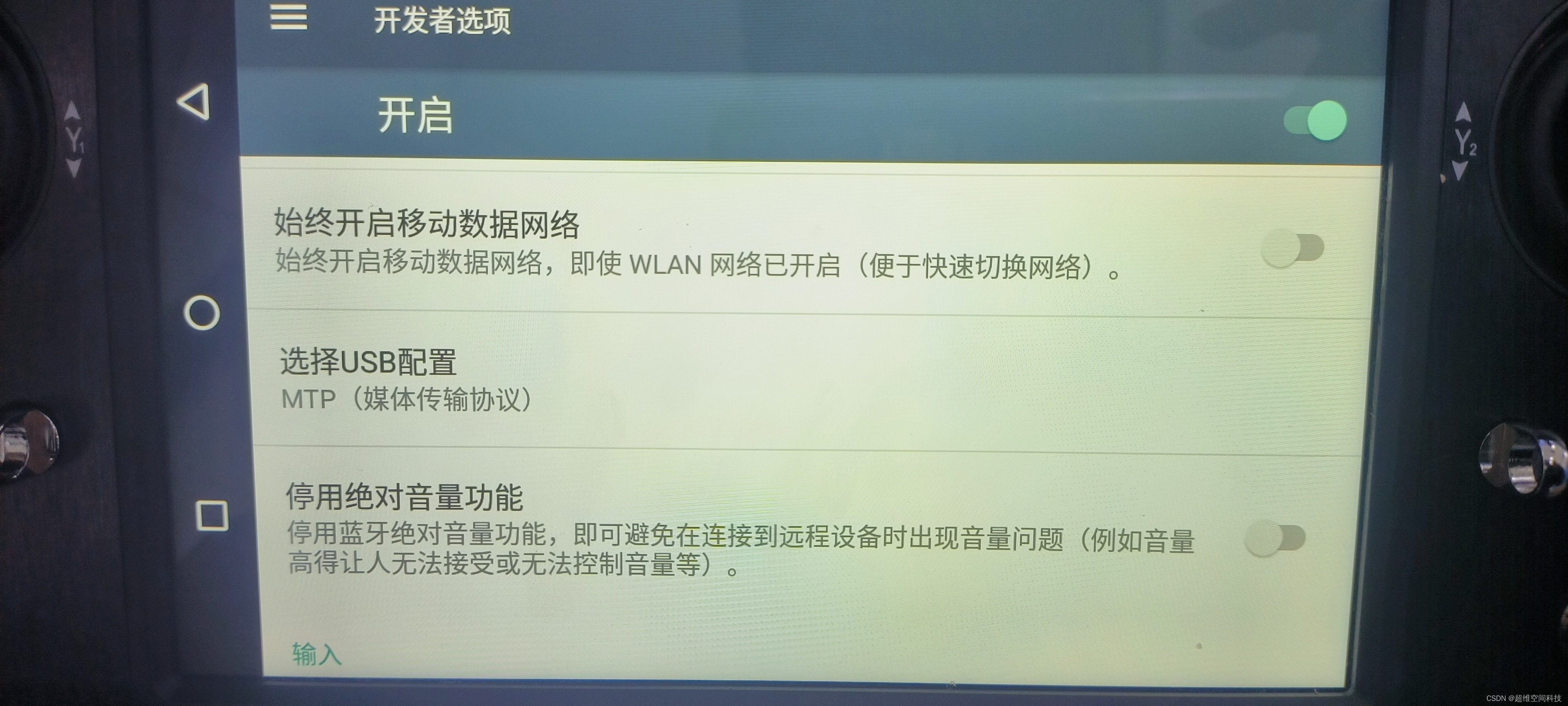 查看内存:点击设置-》存储-》内部存储空间-》其他 查看内存:点击设置-》存储-》内部存储空间-》其他
连接电脑版QGC
点设置->更多->网络共享与便携式热点->开启以太网网络共享 打开遥控器热点  电脑连接遥控器热点 电脑连接遥控器热点  电脑关闭防火墙 协议选udp,port不用写,添加Server如下192.168.43.1:14552,点击Add Server,然后点击确认,然后连接即可 电脑关闭防火墙 协议选udp,port不用写,添加Server如下192.168.43.1:14552,点击Add Server,然后点击确认,然后连接即可  我这里用的是mipi摄像头,设置rtsp地址如下: rtsp://192.168.43.1:8554/fpv_stream 我这里用的是mipi摄像头,设置rtsp地址如下: rtsp://192.168.43.1:8554/fpv_stream  连接好如下: 连接好如下: 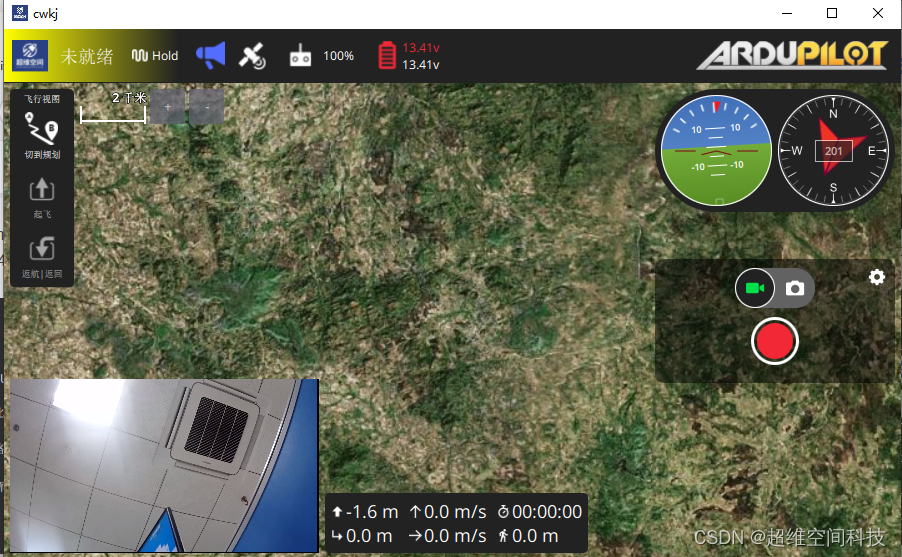
使用海康威视网口摄像头
 MINI PTZ摄像机 MINI PTZ摄像机  使用网口线连接接收机网口端; 连接方式如下: 使用网口线连接接收机网口端; 连接方式如下:  
 将水晶头与对应的H16接收机网口端引脚链接; 可以焊接或定制相应的链接线 将水晶头与对应的H16接收机网口端引脚链接; 可以焊接或定制相应的链接线  电源采用了一个12v的稳压模块连接摄像机DC口进行供电  H16接收机连接飞控采用POW+SBUS端口连接: H16接收机连接飞控采用POW+SBUS端口连接:
》》上文准备工作完毕后开始摄像头设置 要用在H16接收机的LAN口,需要具备:摄像头设备ip必须为192.168.144.xxx。网关设置为192.168.144.11或者192.168.144.10。无防火墙,无验证功能,电脑VLC可显示图像。有rtsp拉流地址(显示视频):rtsp地址不能为192.168.144.10(因为接收机已经占用10)或者自带app。控制:接收机有sbus控制协议(可实体键控制),串口控制协议(配合APP使用)网口网络协议(配合APP使用) 吊舱设置拉辅码流 720p,固定码流1m~2m码流
》》使用网口连接摄像头和电脑(注:同时需要使用DC口给摄像头供电) 局域网电脑下载“设备网络搜索”软件 下载地址:https://www.hikvision.com/cn/support/tools/hitools/clea8b3e4ea7da90a9/  安装“设备网络搜索”软件,打开软件,软件会自动搜索局域网内所以海康设备,找到需要修改的设备IP。 左侧勾选需要修改的设备,右侧“修改网络参数”中修改对应信息(IP、子网掩码等等),输入待修改设备的管理员密码,点击修改。 √ 注意事项: 1、如果“修改网络参数”是灰色无法编辑,请先关闭“启用DHCP”,再修改 2、提示“修改失败”:一般是输入的“设备密码”不对导致的,如果忘记了密码,可做密码重置 https://hkrobot.hikvision.com/servlet/WXShow?action=sac&sysNum=145716889796196&wxcId=111&FromUserName=xubotao&question=%E7%82%B9%E6%AD%A4%E6%9F%A5%E7%9C%8B&fid=&sId=337043&MsgType=workflow 安装“设备网络搜索”软件,打开软件,软件会自动搜索局域网内所以海康设备,找到需要修改的设备IP。 左侧勾选需要修改的设备,右侧“修改网络参数”中修改对应信息(IP、子网掩码等等),输入待修改设备的管理员密码,点击修改。 √ 注意事项: 1、如果“修改网络参数”是灰色无法编辑,请先关闭“启用DHCP”,再修改 2、提示“修改失败”:一般是输入的“设备密码”不对导致的,如果忘记了密码,可做密码重置 https://hkrobot.hikvision.com/servlet/WXShow?action=sac&sysNum=145716889796196&wxcId=111&FromUserName=xubotao&question=%E7%82%B9%E6%AD%A4%E6%9F%A5%E7%9C%8B&fid=&sId=337043&MsgType=workflow
要用在H16接收机的LAN口,摄像头IP需要设置为192.168.144.xxx。网关设置为192.168.144.11或者192.168.144.10。 我这里ip设置的是192.168.144.123,如下图所示: 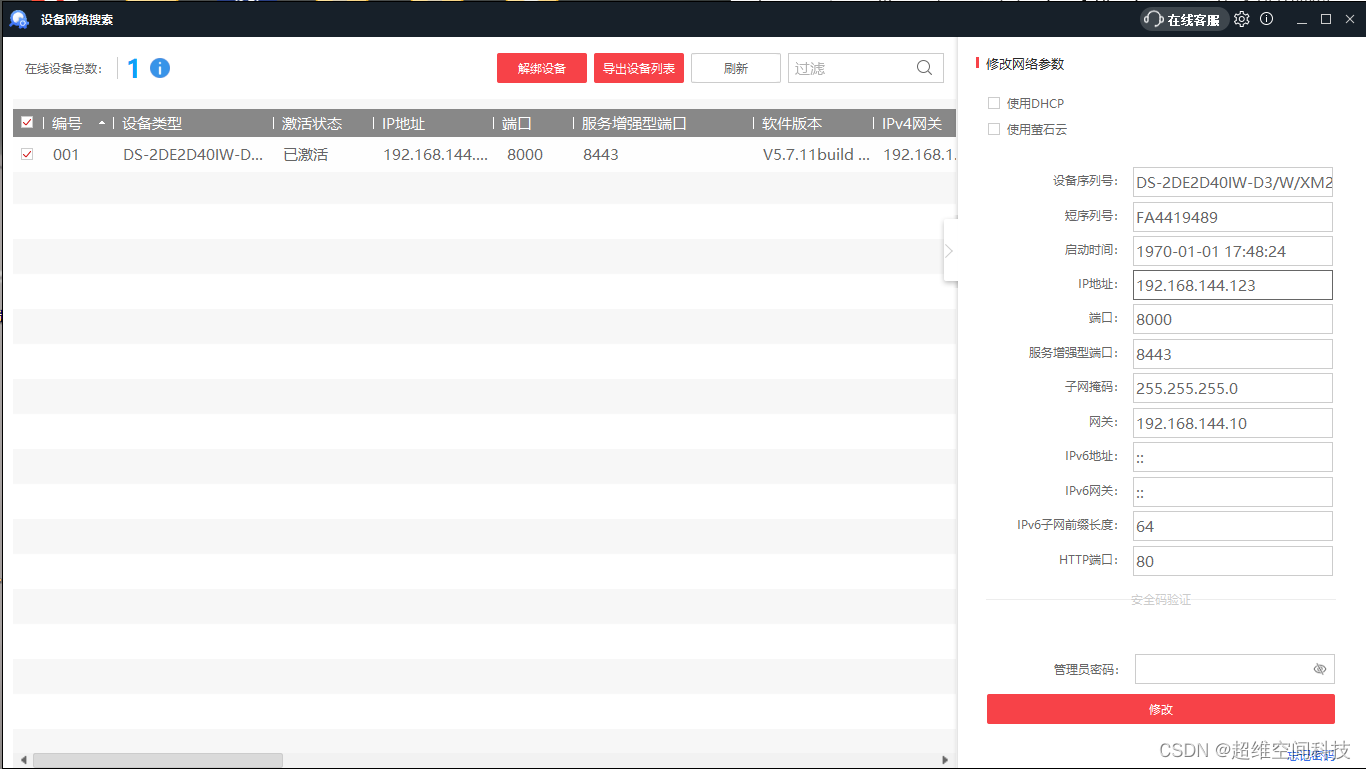 (注:首次连接设备网络助手时会自动提示设置密码,请勿遗忘密码,如忘记密码可以按照上文方式修改密码) (注:首次连接设备网络助手时会自动提示设置密码,请勿遗忘密码,如忘记密码可以按照上文方式修改密码)
修改完毕摄像头ip地址后同时修改电脑网口的ip地址保持在同一网段: 更改协议版本4 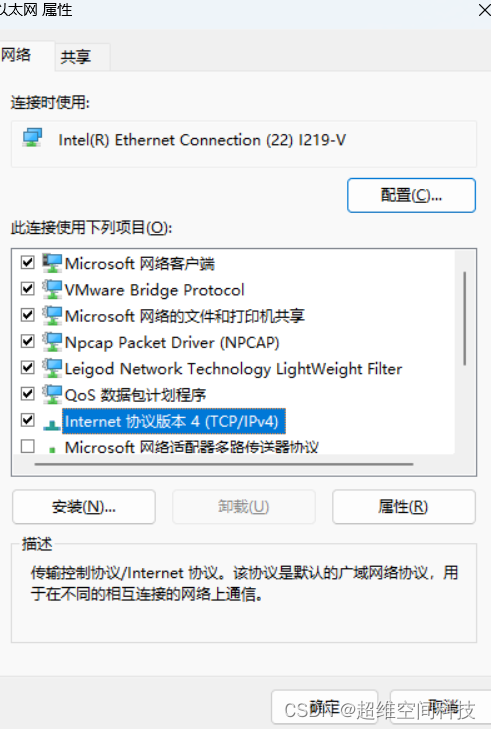
将电脑网口的网段设置为192.168.144.XXX(注:电脑和摄像机的ip最后三位不能相同)如下图: 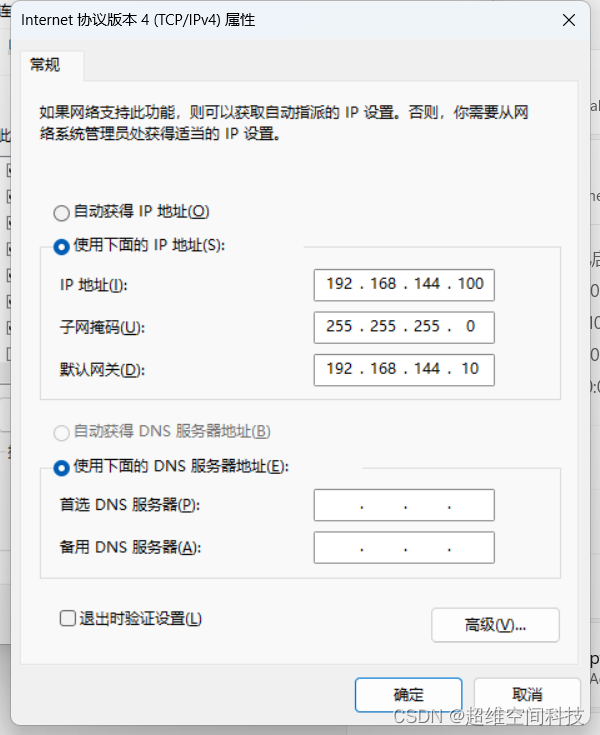 设置完成后可以使用VLC播放器拉流查看,VLC下载百度网盘连接:(https://pan.baidu.com/s/1HY1RtxZnquX1gK–m_RonQ) 密码:cwkj 下载完成后,打开VLC》媒体》打开网络串流 设置完成后可以使用VLC播放器拉流查看,VLC下载百度网盘连接:(https://pan.baidu.com/s/1HY1RtxZnquX1gK–m_RonQ) 密码:cwkj 下载完成后,打开VLC》媒体》打开网络串流  选择网络协议选项, 输入子码流:rtsp://用户名:密码@IP地址:554/Streaming/Channels/102 (注:输入子码流即可,主码流在使用H16遥控器查看时会出现延迟卡顿现象,如果尝试主码流后未出现延迟卡顿也可以使用主码流进行查看) 主码流:rtsp://用户名:密码@IP地址:554/Streaming/Channels/101 用户名一般为:admin 密码为在首次打开设备网络搜索时设置的密码 如下图: 选择网络协议选项, 输入子码流:rtsp://用户名:密码@IP地址:554/Streaming/Channels/102 (注:输入子码流即可,主码流在使用H16遥控器查看时会出现延迟卡顿现象,如果尝试主码流后未出现延迟卡顿也可以使用主码流进行查看) 主码流:rtsp://用户名:密码@IP地址:554/Streaming/Channels/101 用户名一般为:admin 密码为在首次打开设备网络搜索时设置的密码 如下图:
 如输入后VLC正常显示画面代表设置未出现问题,如未出现画面报错,则检查电脑和摄像机的ip设置 如输入后VLC正常显示画面代表设置未出现问题,如未出现画面报错,则检查电脑和摄像机的ip设置
在VLC显示正常后打开浏览器输入摄像机ip地址 如下图:  进入界面后输入账号密码(账号一般为:admin 密码为首次登陆时设置的那个) 进入界面后输入账号密码(账号一般为:admin 密码为首次登陆时设置的那个)
 进入界面后选择配置选项》视音频 随后按照我下图的设置进行主码流和辅码流设置: 进入界面后选择配置选项》视音频 随后按照我下图的设置进行主码流和辅码流设置:   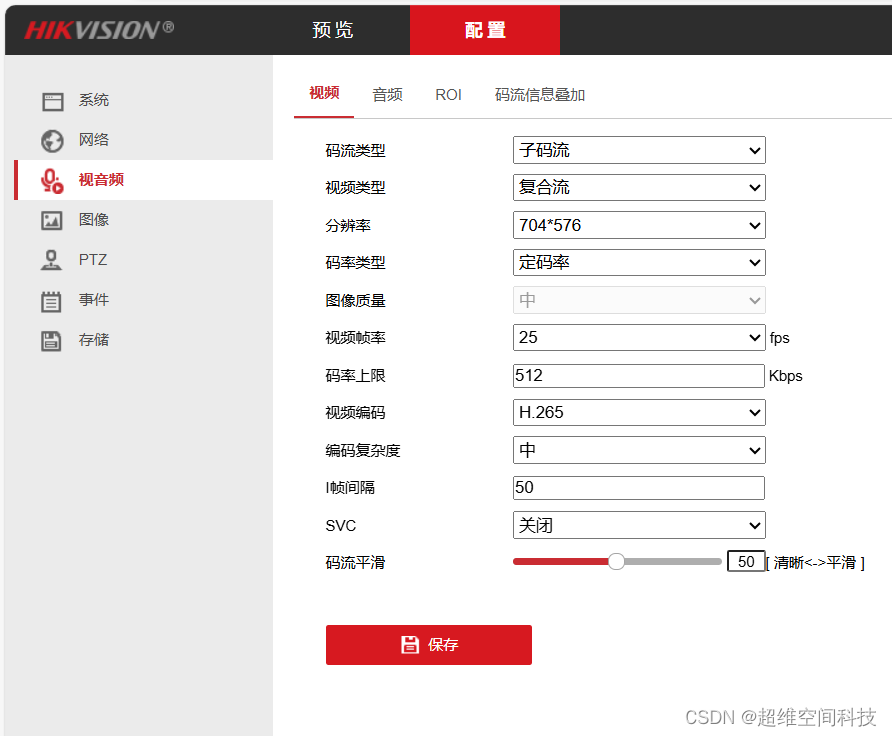 摄像头设置完成后连接H16接收机,打开遥控器》H16助手》视频查看》视频流地址》自定义 如下图: 摄像头设置完成后连接H16接收机,打开遥控器》H16助手》视频查看》视频流地址》自定义 如下图:  
 自定义内ip为上文中VLC拉流时所使用的ip地址 自定义内ip为上文中VLC拉流时所使用的ip地址  设置完成后回到视频查看界面,有画面说明设置成功。 然后把RTSP地址填到QGC中,就可以在QGC中查看摄像头的画面 设置完成后回到视频查看界面,有画面说明设置成功。 然后把RTSP地址填到QGC中,就可以在QGC中查看摄像头的画面

在连接成功后,如需要更改摄像头朝向位置或设置巡航可以在浏览器上进行设置,如下图: 如摄像头图像颠倒:可以将镜像设置为中心 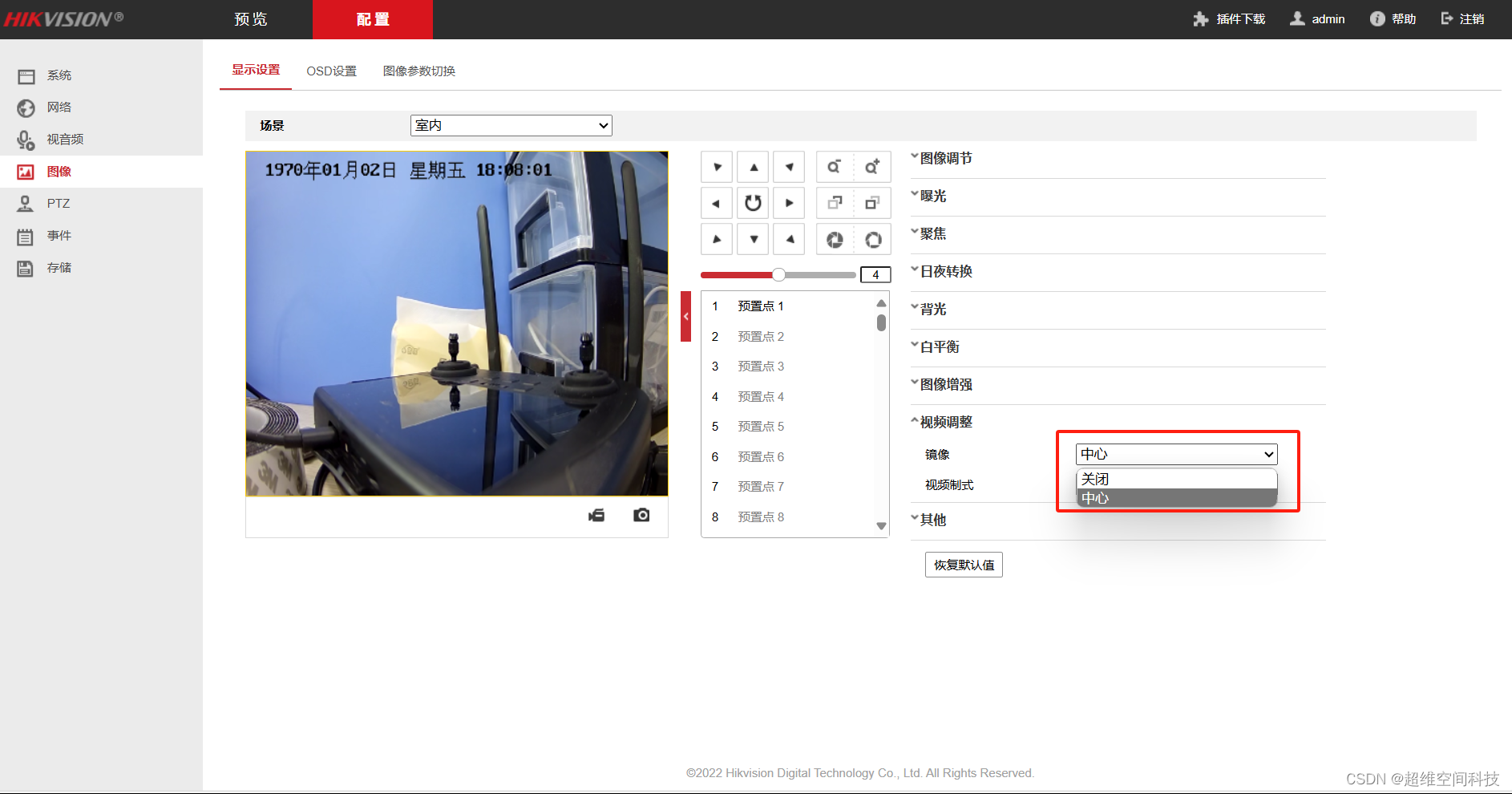 如需更改摄像头开机后朝向及巡航可以先将摄像头调整至预期位置,随后保存预设点,如需摄像头巡航设置多个预设点即可。 如需更改摄像头开机后朝向及巡航可以先将摄像头调整至预期位置,随后保存预设点,如需摄像头巡航设置多个预设点即可。 
六、乐迪AT9S PRO
对码
将遥控器和接收机放在一起,距离一米以内,然后把遥控器和接收机上电,长按接收机侧面的(ID SET)开关 1 秒钟以上,LED 灯闪烁,指示开始对码。当指示灯停止闪烁,对码完成
设置接收机输出模式
Radiolink R9DS 2.4G 九通道接收机有PWM和SBUS两种工作模式。 PWM 信号工作模式: 接收机指示灯为红色,R9DS 输出 9 个通道的普通 PWM 信号; SBUS 信号工作模式: 接收机指示灯为蓝色,R9DS 的 第 9 通道输出 SBUS 信号, 同时原来的 1 通道输出独立 3 通道 PWM 信号,原来的 2-6 通道输出 6-10 通道的独立 PWM 信号,7-8 通道无信号,共计10 个通道的信号。 切换方法 短按接收机侧面的对码键(ID SET)开关两次(一秒内),完成 CH9 普通 PWM 或 SBUS 信号切换。
如果想使用PPM协议,可以将接收机设置成PWM模式,然后用ppm编码器接到飞控上
七、云卓T10
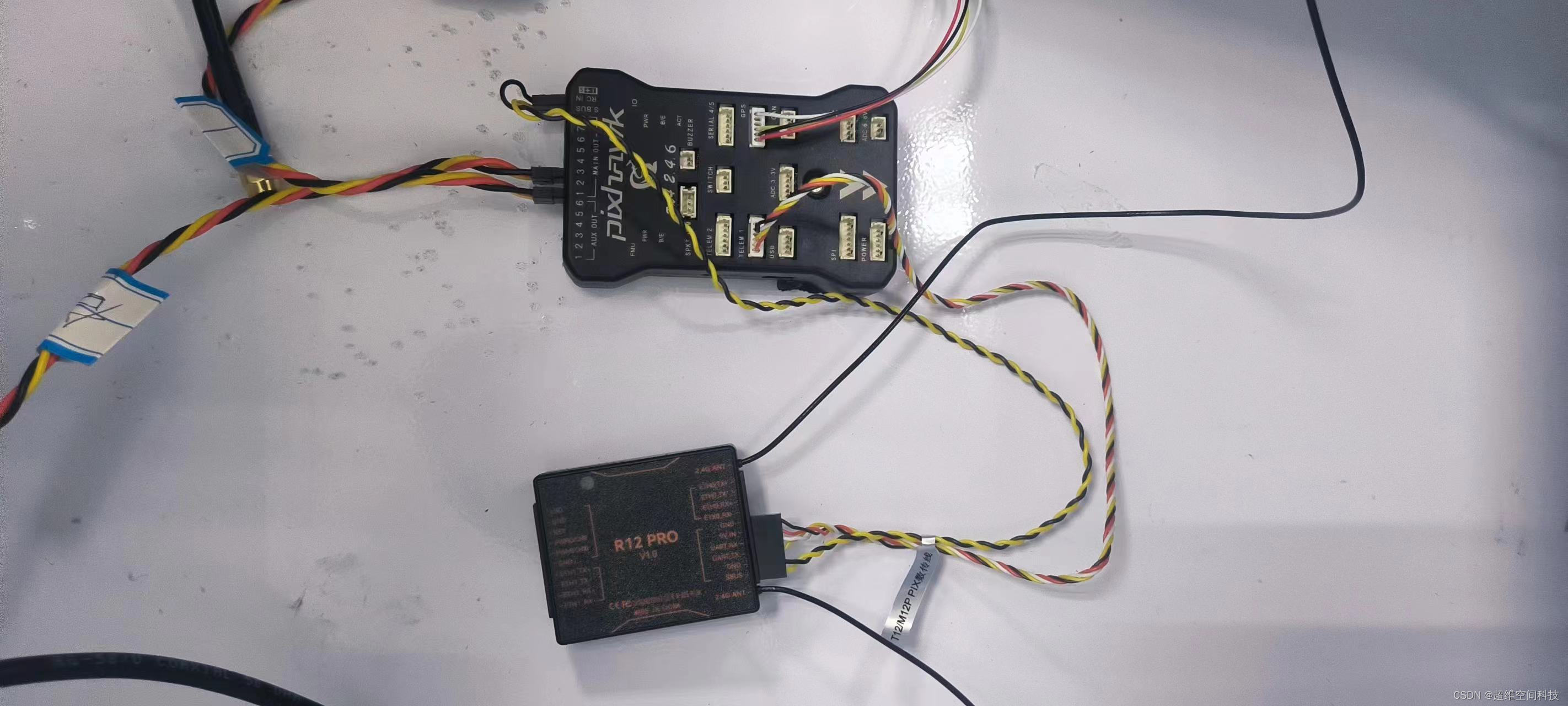
说明书下载: https://download.csdn.net/download/qq_38768959/86632536 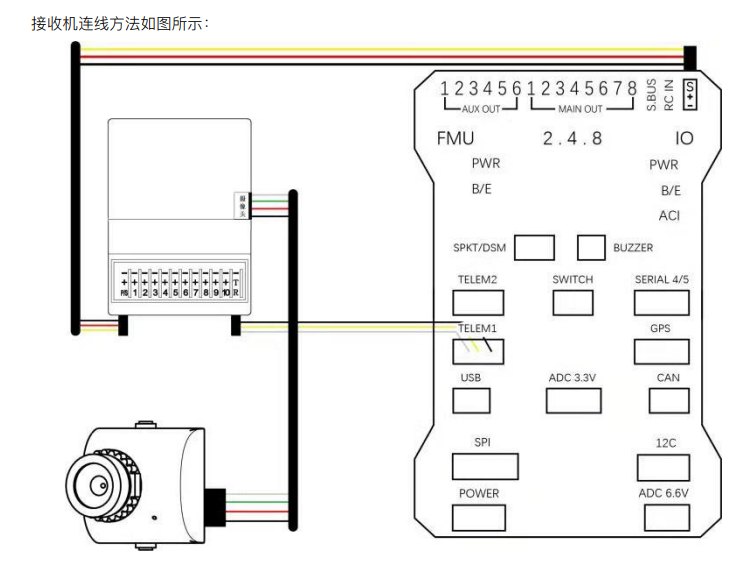 实物接线如下 实物接线如下 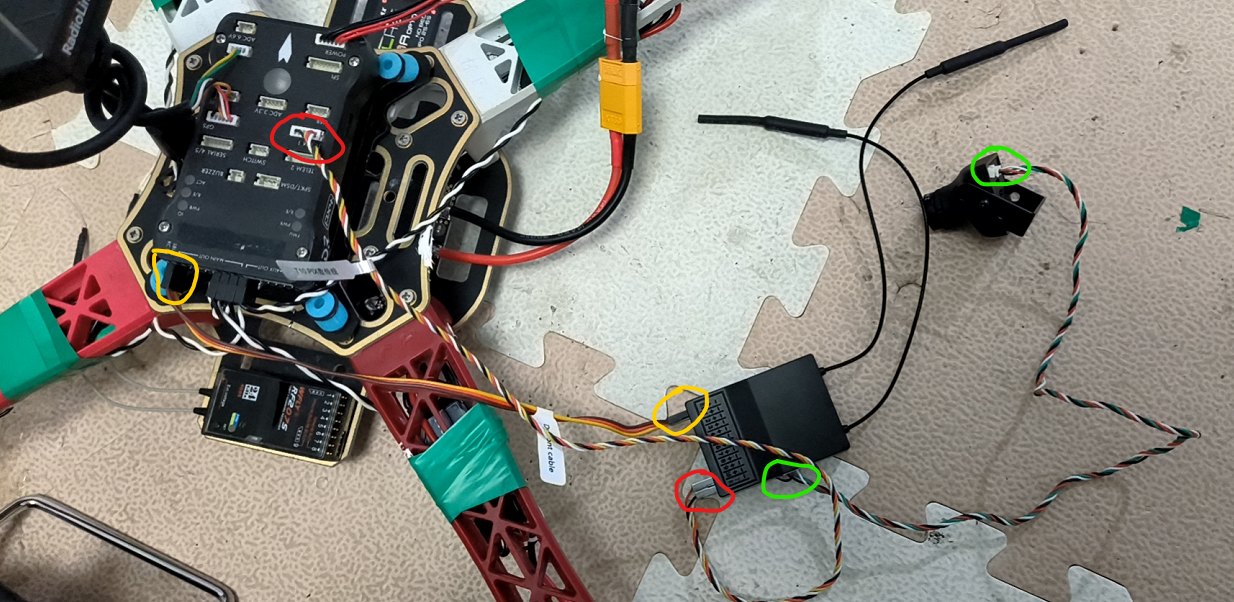 下载调试软件 http://www.skydroid.xin/?type=news&S_id=7&page=2 下载下面两个软件并安装 下载调试软件 http://www.skydroid.xin/?type=news&S_id=7&page=2 下载下面两个软件并安装  长按电源键给遥控器上电,同时给无人机和接收机上电 打开手机蓝牙,连接下面的设备,密码1234 长按电源键给遥控器上电,同时给无人机和接收机上电 打开手机蓝牙,连接下面的设备,密码1234  连接蓝牙后,打开设备助手,连接方式设置为蓝牙,选择对应的蓝牙, 连接蓝牙后,打开设备助手,连接方式设置为蓝牙,选择对应的蓝牙, 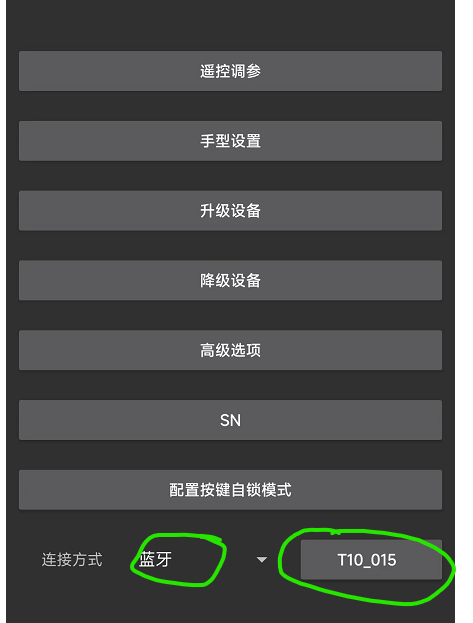 其中高级选项中根据需要设置飞控数传口的波特率和接收机的输出协议 其中高级选项中根据需要设置飞控数传口的波特率和接收机的输出协议 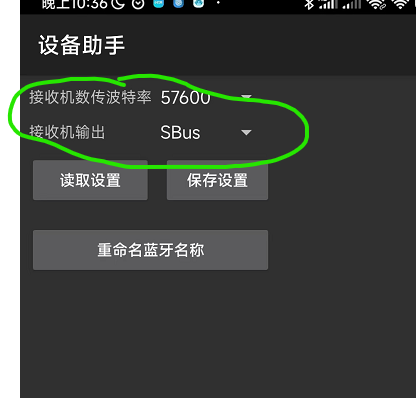 打开QGC,软件设置->通信连接->添加,设置类型为蓝牙,点击扫描 打开QGC,软件设置->通信连接->添加,设置类型为蓝牙,点击扫描  选择T10,随便取一个连接名称,最后点确认,然后连接添加的连接,即可连接QGC。第一次连接时,需要输入蓝牙密码,默认为1234 选择T10,随便取一个连接名称,最后点确认,然后连接添加的连接,即可连接QGC。第一次连接时,需要输入蓝牙密码,默认为1234 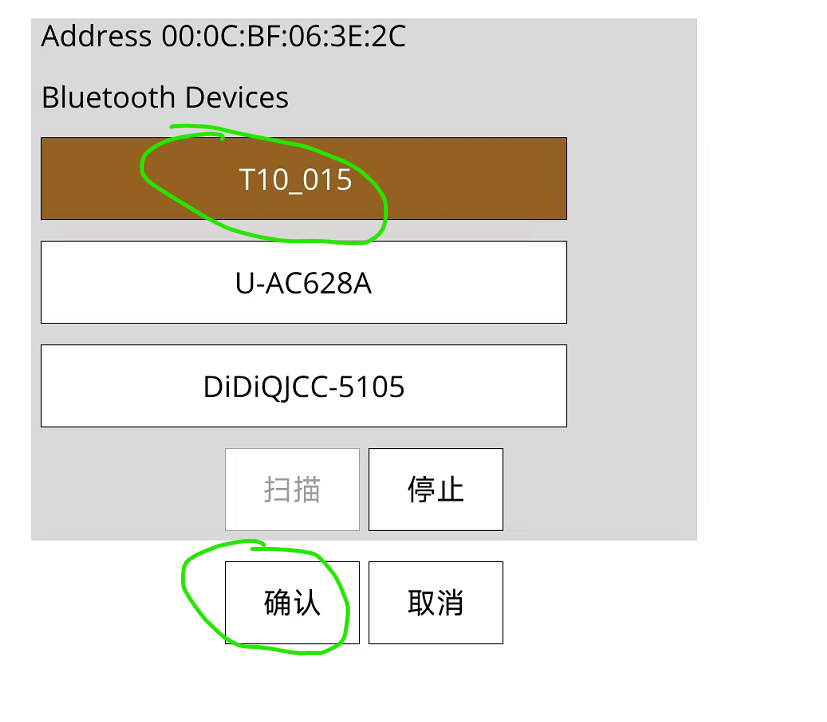 如果要查看摄像头图像,将USB连接连接手机和遥控器,然后打开云卓FPV即可 对频 按住接收机侧对频按钮2秒进入对频模式,指示灯绿灯快闪。此时遥控开机即可完成对频,对频成功 后指示灯绿灯处于常亮。 连接电脑QGC 买根3.0的双头USB线 如果要查看摄像头图像,将USB连接连接手机和遥控器,然后打开云卓FPV即可 对频 按住接收机侧对频按钮2秒进入对频模式,指示灯绿灯快闪。此时遥控开机即可完成对频,对频成功 后指示灯绿灯处于常亮。 连接电脑QGC 买根3.0的双头USB线  一端插在遥控的USB1口,另一端插在电脑上 一端插在遥控的USB1口,另一端插在电脑上 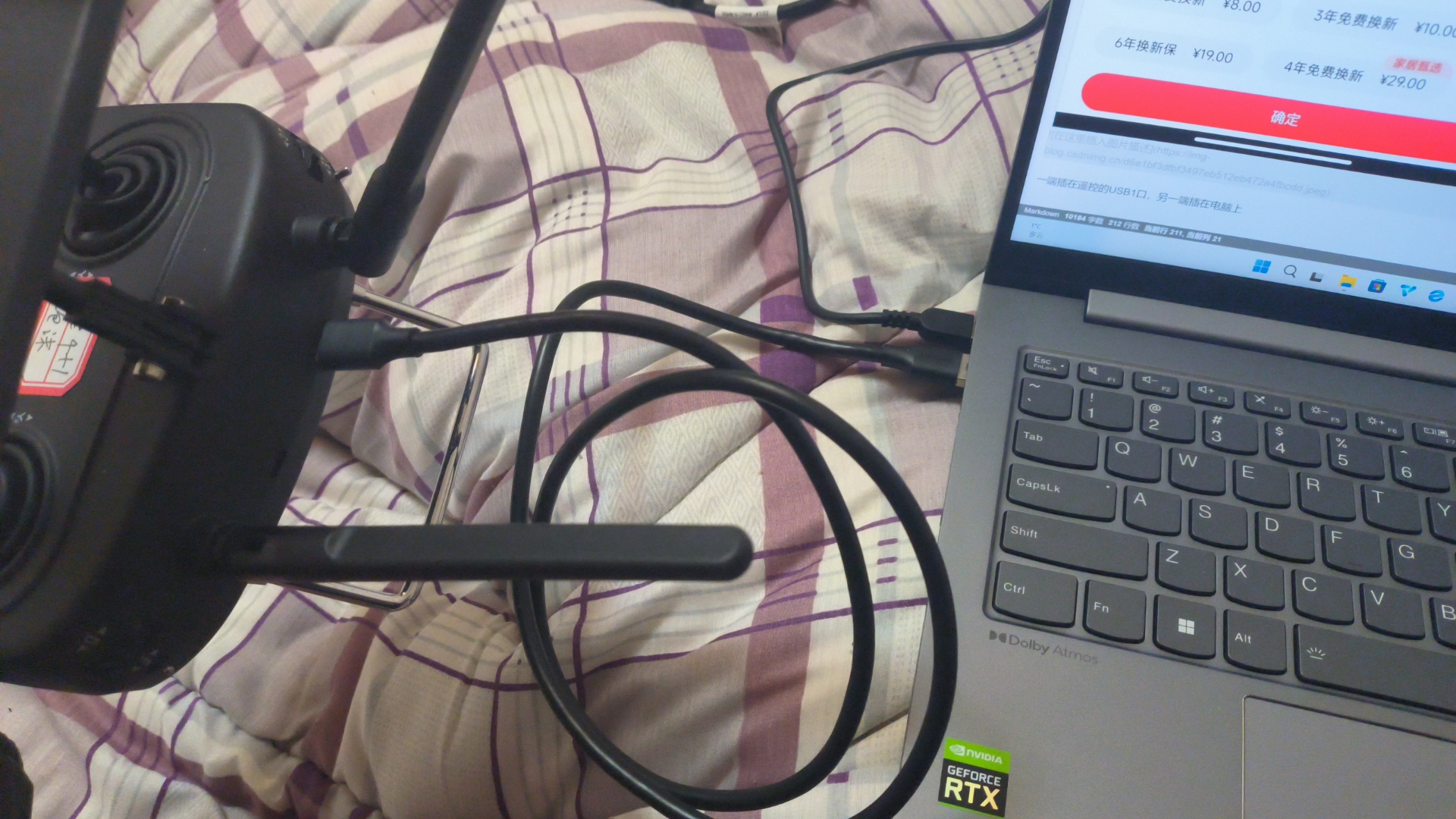 打开设备管理器,会看到因为驱动原因,没法正常识别端口 下载CP2102驱动 链接:https://pan.baidu.com/s/1VIEQwiP0ygj5AhIVnhdXrw 提取码:9cor –来自百度网盘超级会员V5的分享 先解压 然后安装,一般的64位电脑就安装x64版本 打开设备管理器,会看到因为驱动原因,没法正常识别端口 下载CP2102驱动 链接:https://pan.baidu.com/s/1VIEQwiP0ygj5AhIVnhdXrw 提取码:9cor –来自百度网盘超级会员V5的分享 先解压 然后安装,一般的64位电脑就安装x64版本
安装完重新插一下USB 就可以正常识别了 然后打开QGC,选择遥控器的端口,设置波特率115200,勾选开始时自动连接。设置完之后不要直接连接,重启地面站会自动连接上 手机端显示视频 下载安装云卓FPV软件 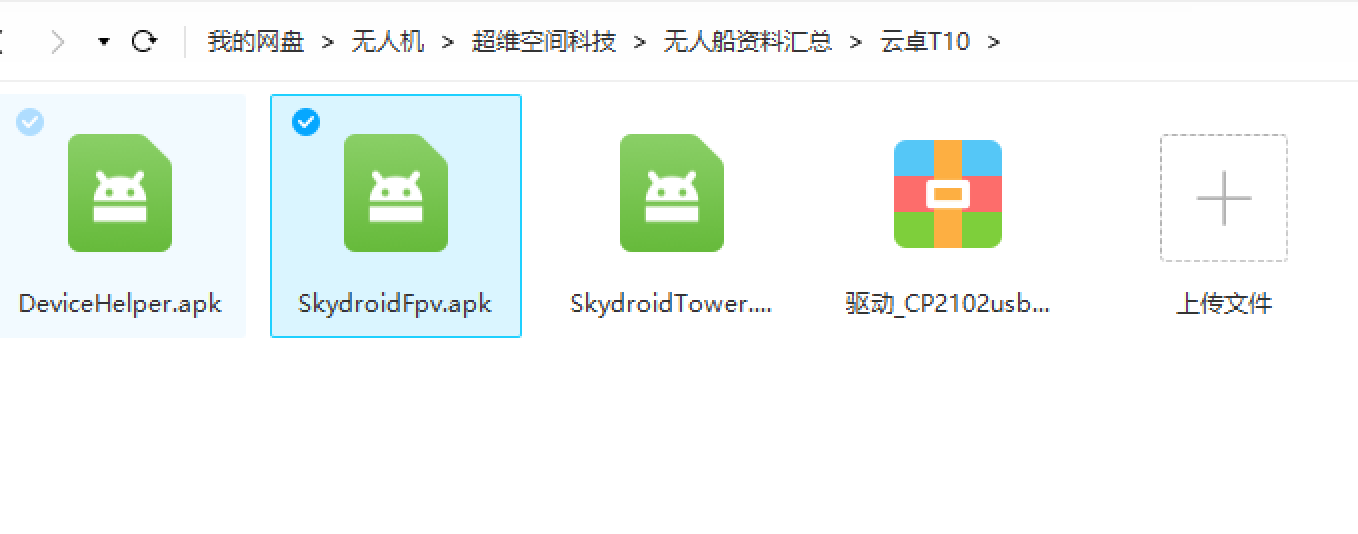 然后用遥控器配的USB线连接遥控器和手机,会弹出提示,选择用云卓Fpv打开,即可看到图像 然后用遥控器配的USB线连接遥控器和手机,会弹出提示,选择用云卓Fpv打开,即可看到图像
使用mini接收机 mini接收机可能存在遥控器无法对码的问题. 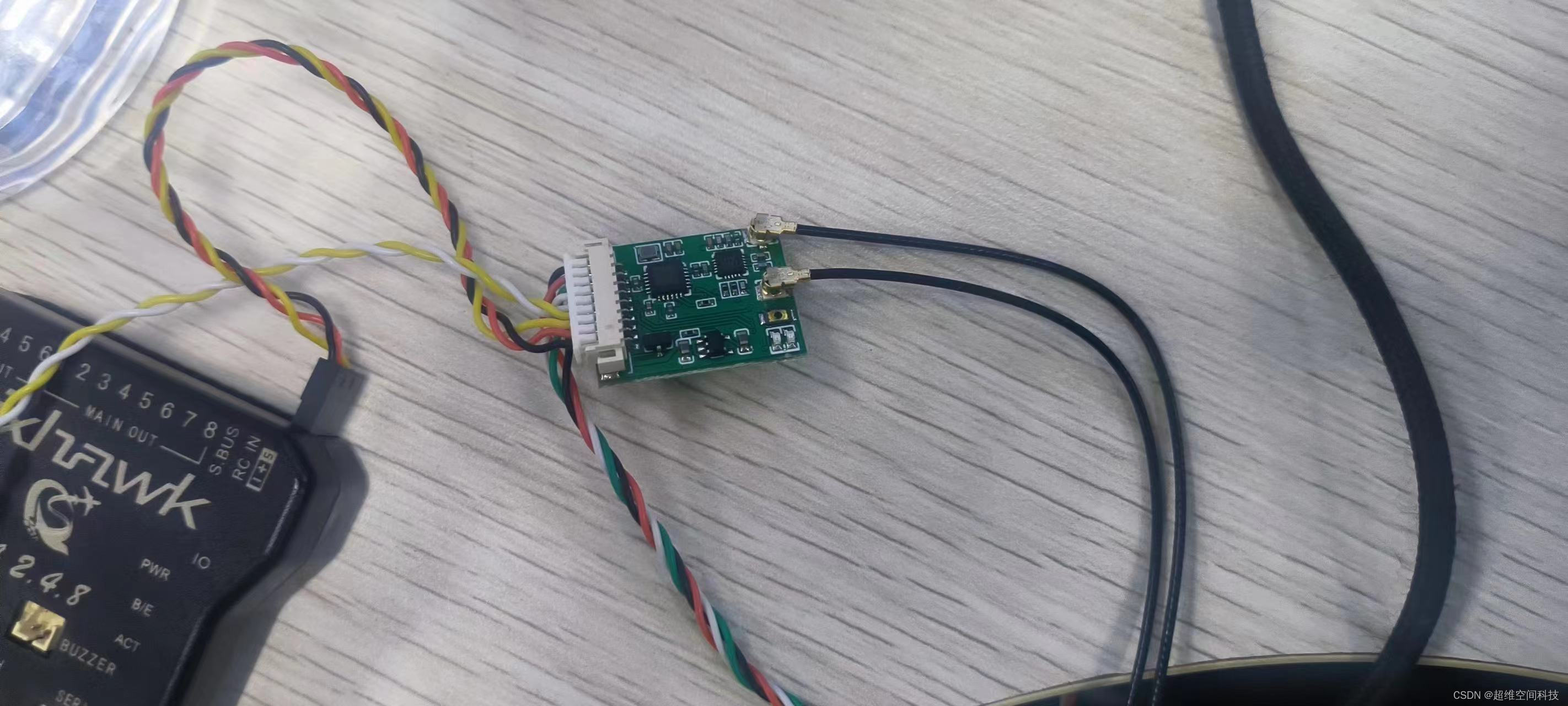 解决办法: 先降级遥控器,同时长按遥控器的A键和电源键。遥控器电源灯循环闪烁。 打开手机蓝牙,打开设备助手 选择遥控器的蓝牙,点击降级设备-》遥控器降级-》检查固件信息-》立即降级 解决办法: 先降级遥控器,同时长按遥控器的A键和电源键。遥控器电源灯循环闪烁。 打开手机蓝牙,打开设备助手 选择遥控器的蓝牙,点击降级设备-》遥控器降级-》检查固件信息-》立即降级     降级完之后,长按接收机的对码按键,使指示灯闪烁,然后打开遥控器,即可对码成功,对码成功后,类似降级的步骤,先给接收机升级,再给遥控器升级 降级完之后,长按接收机的对码按键,使指示灯闪烁,然后打开遥控器,即可对码成功,对码成功后,类似降级的步骤,先给接收机升级,再给遥控器升级 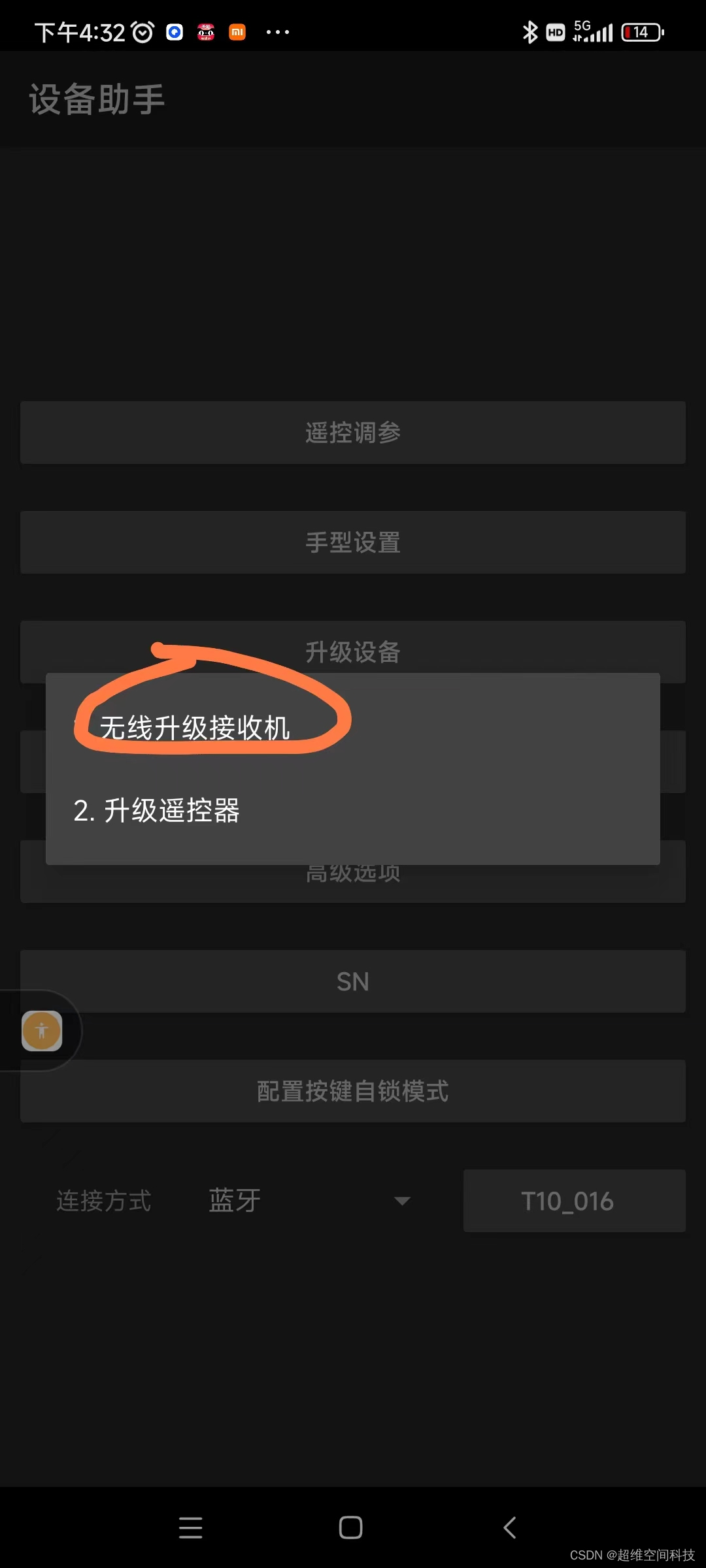
8、云卓H12 PRO
说明书下载地址: 链接:https://pan.baidu.com/s/18bzsqw2YT21sRbNLVN20sA?pwd=wkek 提取码:wkek –来自百度网盘超级会员V6的分享
H12Pro的接收机是5V供电,如果供电不足会导致接收机一直是亮红灯。
接线
用原装的接收机线,串口端接飞控的Telem1,telem1设置为数传口,并且波特率为57600。SBUS口接飞控的RCIN口。
遥控器和电脑传输文件 将遥控器通过typec usb线连接到电脑,选择已关联的设备-》USB 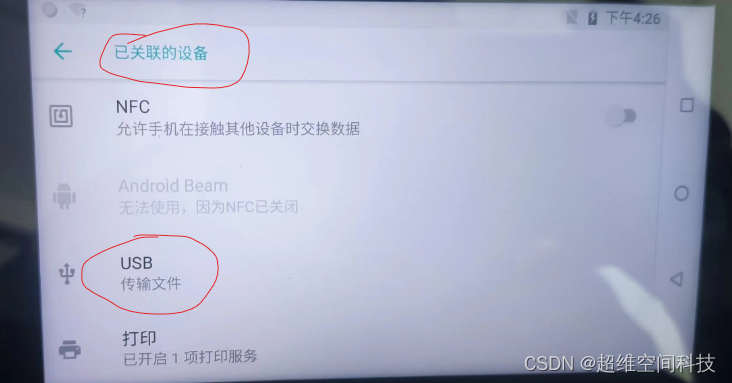 点击USB选择传输文件 点击USB选择传输文件 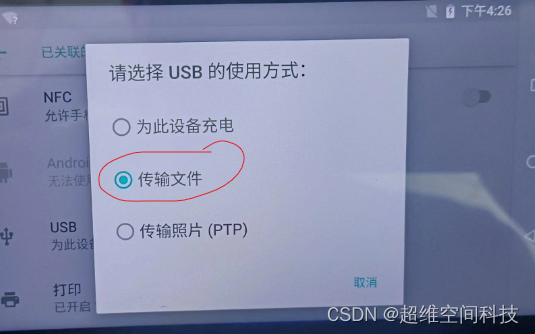 然后在电脑上就会出现遥控i的内存,打开往里面拖文件就行 然后在电脑上就会出现遥控i的内存,打开往里面拖文件就行  拖完后可以在文件管理器里面找到 拖完后可以在文件管理器里面找到  连接地面站软件 遥控器会默认连接到地面站,但是需要确保遥控器波特率的飞控的波特率一致,遥控器默认波特率是921600,可以通过H12Pro助手修改,如果H12Pro助手没有下面的选项,就给遥控器联网更新一下软件 连接地面站软件 遥控器会默认连接到地面站,但是需要确保遥控器波特率的飞控的波特率一致,遥控器默认波特率是921600,可以通过H12Pro助手修改,如果H12Pro助手没有下面的选项,就给遥控器联网更新一下软件 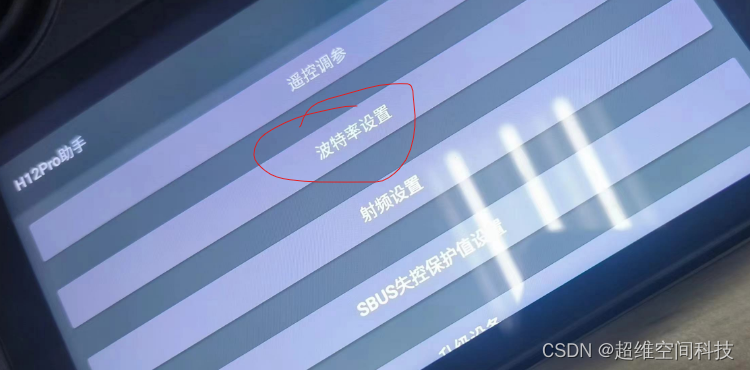 设置完点保存设置即可,波特率一致后,打开地面站后会自动连接 设置完点保存设置即可,波特率一致后,打开地面站后会自动连接 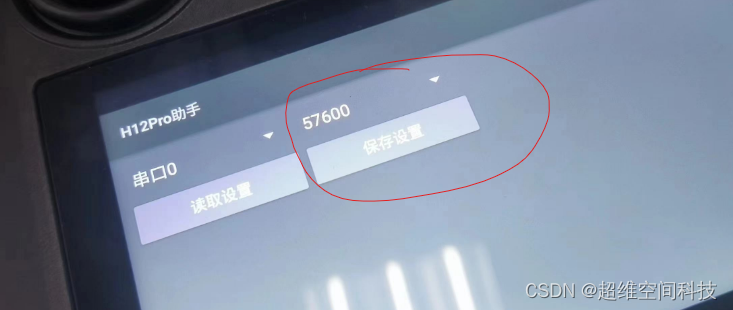
摄像头 我这里接的是H12pro专用的网口三体摄像头,接线如下 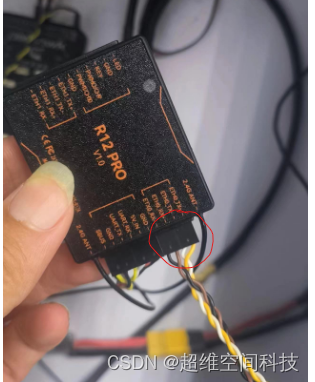 打开云卓H12Pro助手,进入视频查看,点击底部设置按钮 打开云卓H12Pro助手,进入视频查看,点击底部设置按钮 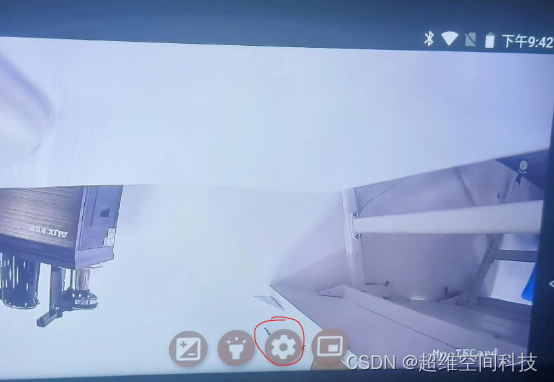 视频流地址设置为网口三体,正常的话就会显示出图像,把这个RTSP地址复制到QGC里就可以在QGC里显示图像 视频流地址设置为网口三体,正常的话就会显示出图像,把这个RTSP地址复制到QGC里就可以在QGC里显示图像 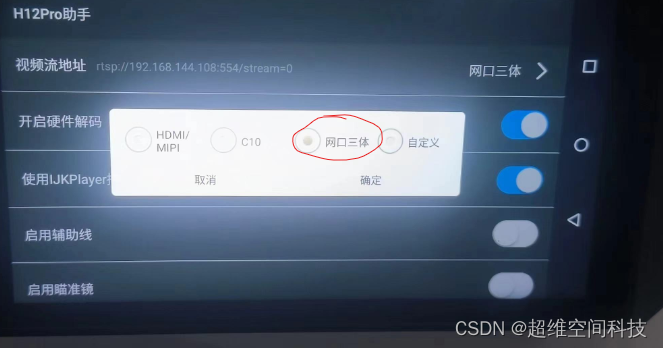
|