STM32单片机按键改变频率呼吸灯(用到自带PWM输出和自己写一个PWM输出) |
您所在的位置:网站首页 › 奔驰内饰按键灯变暗 › STM32单片机按键改变频率呼吸灯(用到自带PWM输出和自己写一个PWM输出) |
STM32单片机按键改变频率呼吸灯(用到自带PWM输出和自己写一个PWM输出)
|
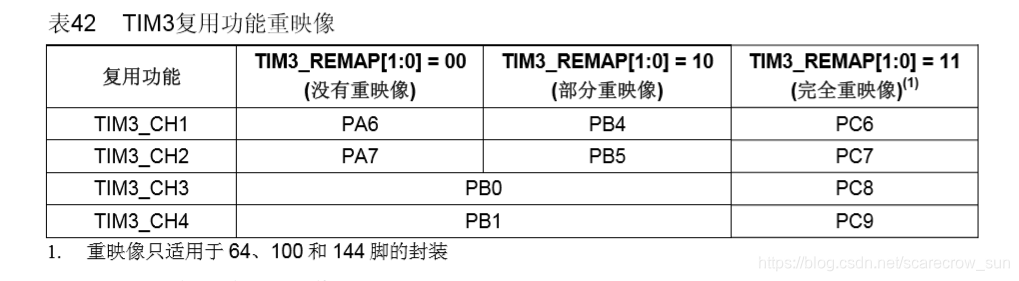
写在前面 好久没写博客了,在经过一个学期的51单片机的学习,最终经过考核,终于进入了学校的基地,看到基地里面的机器人,那个兴奋啊。还记得当天8个小时的密闭环境的编程,没有胃口吃饭,没有心思吃饭,一直想着怎么完成题目,考完之后心里更忐忑,担心无法被录取,在收到面试消息之后,这个晚上,我应该一辈子都不会忘记,睡不着觉,失眠到1点半,早上5点半就醒了,当自己最终收到被录取的信息的时候,忐忑的心终于放下了。 在进入基地之后开始学习STM32F1,继续写博客,记录下自己新的起点,新的路程。望自己也能在总结自己中提升,也希望在总结了每周之后,能给大家一个参考的作用。 第一周学习任务作业 1.用两个定时器,完成两个不同频率的呼吸灯。用四个按键分别进行频率增减 学习感想 接触到32的第一个感想就是复杂,天哪,真的是太复杂了,光是寄存器就有上百个,定时器就有11个,相比较而言,51单片机(89C52)里面的定时器顶天了,加上那个不太好配置的一共才3个,寄存器也远远不及32的寄存器,可以说32真的是太强大了,而学习了之后,发现里面需要配置的地方,配置的步骤,配置的函数,真的是挺多的。个人觉得,不能只学函数,还要学习配置寄存器,也是为了以后配置底层代码更加的方便。 任务实现思路 任务的要求就是输出一个改变占空比的PWM方波来实现灯泡的亮度变化,然后用按键来改变亮度变化的频率。相信大家都知道呼吸灯实现的频率,就是使用不同占空比的PWM波来实现不同的电压,从而实现了流过灯泡电流的大小,从而改变的灯泡的亮度。 我在思考用按键来改变频率的时候,想到应该可以改变每次输出定时器中断输出方波的时间来实现,也可以用改变方波的占空比来实现,因为在之前使用51单片机呼吸灯的时候,曾经尝试过改变定时器中断的方式来改变方波,但是发现效果并不是那么的好,同时衍生到STM32,效果应该也是不好的,思考里面的原因,个人人为,是两个定时器,如果设置相同的打断优先级,那么极有可能会造成一个中断要在另一个中断完成的时候,才能够中断完成,而这种情况,就会导致一个灯泡很有可能会卡顿,甚至出现一段时间的熄灭,所以就采用不同的占空比来进行输出,两个定时器中断的时间间隔是相同的,每次间隔的时间也是相同的,只会改变一段时间内的占空比,从而实现不同频率亮度的变化。而实现呼吸灯,是需要占空比增大和减小的,所以我们只需要改变占空比增大的最大值和减小到的最小值,就实现了呼吸灯的不同频率。 下面主要部分实现的思路: 配置两个定时器,设置中断时间,扫描按键,判断是否需要增加占空比,或者减少占空比,输出PWM方波。 正点原子的开发板上面一个LED灯接的是PB5,一个接的是PE5,根据我们查开发手册可以得到的内容可以产生那个PWM方波的定时只有定时器2,3,4,5,所以我们就需要根据这四个定时器引出的引脚或者是重映射的IO口来进行配置,再进行查表得到,这4个定时器里面可以重映射出来的引脚就只有PB5,所以我们先配置好第一个IO口,并让其重映射到PB5上,让这一个IO口先输出PWM方波,这样就可以实现呼吸灯,因为另一个IO口不能直接配置IO口,所以我们需要人为的输出PWM方波,所以需要另外配置一个定时一定时间的定时器,并设置一个参数,在小于这一个参数的时候输出低电平,在大于这一个参数的时候输出高电平,这样就实现了PWM方波的输出。 注:代码是正点原子的代码进行改编而来,各个模块的代码大家可以去关注正点原子的微信来得到,都是开源的 #include "led.h" #include "delay.h" #include "key.h" #include "sys.h" //#include "usart.h" #include "timer.h" u16 led1pwmval=0,led1pwmmax = 25;//val是当前输出的占空比,max最大的占空比 //定时器4中断服务程序 void TIM4_IRQHandler(void) //TIM4中断 { static u16 nowtime = 0; //记录当前的时间 extern u16 led1pwmmax; if (TIM_GetITStatus(TIM4, TIM_IT_Update) != RESET) //检查指定的TIM中断发生与否:TIM 中断源 { TIM_ClearITPendingBit(TIM4, TIM_IT_Update); //清除TIMx的中断待处理位:TIM 中断源 nowtime++; if(nowtime == 40) //记录40次,也就是0.4ms一个周期,在这一个周期里面来输出方波 nowtime = 0; if(nowtime led0pwmmax)dir=0; if(led0pwmval==0)dir=1; TIM_SetCompare2(TIM3,led0pwmval); //和前面的方法是类似的,让占空比不断增加,然后不断减小,从而实现呼吸灯的效果 if(dir1)led1pwmval++; else led1pwmval--; if(led1pwmval>led1pwmmax)dir1=0; if(led1pwmvalPB5 //设置该引脚为复用输出功能,输出TIM3 CH2的PWM脉冲波形 GPIOB.5 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5; //TIM_CH2 GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出 GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIOB, &GPIO_InitStructure);//初始化GPIO //初始化TIM3 TIM_TimeBaseStructure.TIM_Period = arr; //设置在下一个更新事件装入活动的自动重装载寄存器周期的值 TIM_TimeBaseStructure.TIM_Prescaler =psc; //设置用来作为TIMx时钟频率除数的预分频值 TIM_TimeBaseStructure.TIM_ClockDivision = 0; //设置时钟分割:TDTS = Tck_tim TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式 TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure); //根据TIM_TimeBaseInitStruct中指定的参数初始化TIMx的时间基数单位 //初始化TIM3 Channel2 PWM模式 TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2; //选择定时器模式:TIM脉冲宽度调制模式2 TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能 TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //输出极性:TIM输出比较极性高 TIM_OC2Init(TIM3, &TIM_OCInitStructure); //根据T指定的参数初始化外设TIM3 OC2 TIM_OC2PreloadConfig(TIM3, TIM_OCPreload_Enable); //使能TIM3在CCR2上的预装载寄存器 TIM_Cmd(TIM3, ENABLE); //使能TIM3 } /*使能TIM4定时器,用来输出方波*/ void TIM4_Int_Init(u16 arr,u16 psc) { TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure; NVIC_InitTypeDef NVIC_InitStructure; RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM4, ENABLE); //时钟使能 TIM_TimeBaseStructure.TIM_Period = arr; //设置在下一个更新事件装入活动的自动重装载寄存器周期的值 计数到5000为500ms TIM_TimeBaseStructure.TIM_Prescaler =psc; //设置用来作为TIMx时钟频率除数的预分频值 10Khz的计数频率 TIM_TimeBaseStructure.TIM_ClockDivision = 0; //设置时钟分割:TDTS = Tck_tim TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式 TIM_TimeBaseInit(TIM4, &TIM_TimeBaseStructure); //根据TIM_TimeBaseInitStruct中指定的参数初始化TIMx的时间基数单位 TIM_ITConfig(TIM4,TIM_IT_Update,ENABLE ); //使能指定的TIM4中断,允许更新中断 NVIC_InitStructure.NVIC_IRQChannel = TIM4_IRQn; //TIM4中断 NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0; //先占优先级0级 NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //从优先级3级 NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道被使能 NVIC_Init(&NVIC_InitStructure); //根据NVIC_InitStruct中指定的参数初始化外设NVIC寄存器 TIM_Cmd(TIM4, ENABLE); //使能TIMx外设 } #include "led.h" //初始化PB5和PE5为输出口.并使能这两个口的时钟 //LED IO初始化 void LED_Init(void) { GPIO_InitTypeDef GPIO_InitStructure; RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB|RCC_APB2Periph_GPIOE, ENABLE); //使能PB,PE端口时钟 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5; //LED0-->PB.5 端口配置 GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //推挽输出 GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //IO口速度为50MHz GPIO_Init(GPIOB, &GPIO_InitStructure); //根据设定参数初始化GPIOB.5 GPIO_SetBits(GPIOB,GPIO_Pin_5); //PB.5 输出高 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5; //LED1-->PE.5 端口配置, 推挽输出 GPIO_Init(GPIOE, &GPIO_InitStructure); //推挽输出 ,IO口速度为50MHz GPIO_SetBits(GPIOE,GPIO_Pin_5); //PE.5 输出高 } |
【本文地址】