人工智能领域中声源定位的研究与发展 |
您所在的位置:网站首页 › 声源定位算法 › 人工智能领域中声源定位的研究与发展 |
人工智能领域中声源定位的研究与发展
|
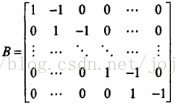
图2-7 自适应波束法系统框图 自适应波束法利用的原理是自适应噪声抵消,即以噪声为处理对象将噪声抑制或者进行非常大的衰减以提高接收信号的质量由系统框图2-7可以看到,在自适应噪声干扰抵消器的前端,提供所需的逼近跟踪信号即噪声信号的是一块矩阵的输出运算输出,此输出相当于起了参考信号的作用。这个块矩阵称为标准Griffiths-Jimm块矩阵,其形式为: 图2-7中的延迟补偿的信号(即含噪语音)减去块运算输出的模仿噪声信号即得到最小均方误差下目标语音估计信号。 在开放环境条件下,如果噪声源的数目比麦克风数目少,自适应波束法能得到很好的性能。而在封闭环境中由于反射和混响会产生多噪声域的情况,在散射噪声条件下自适应波束法的消噪性能比较有限。 3后置自适应滤波法 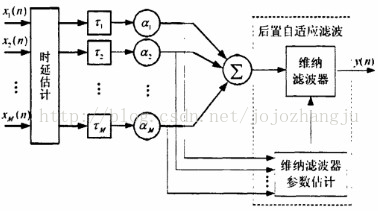
图2-8 后置自适应滤波系统框图 后置自适应滤波法,其系统框图如图2-8所示。由于单纯的延迟累加方法很难得到理想的语音增强,一般在较复杂的实际噪声情况下采用4个麦克风其信噪比的改善在0.5dB-1dB左右,因此需要进一步的增强方法。1988年Zelinsk提出了在传统的波束输出后采用后置滤波来消除不相关噪声的延迟累加滤波方法,即后置自适应滤波法。在图2-7中可以看出后置自适应滤波法即为在延迟累加波束法的后端加入一个那位滤波的环节,这样虽然是系统结构较为延迟累加法复杂,但却能发挥维纳滤波(最小二乘或最小平方滤波)的优势,达到较好的消噪效果。 这种方法中维纳滤波器的系数是根据各信道接收信号间的自相关和互相关得到,即维纳滤波器的系数是自适应变化的。延迟累加后的含噪语音信号经过维纳滤波后得到最小均方误差准则下的目标语音估计信号。这种方法在不相关噪声的环境下能通过相对较少的麦克风数目获得较好的消噪性能。如在较复杂的实际情况下系统采用4个麦克风时,采用此方法比延迟累加方法能提高4dB-6dB左右,消噪效果十分明显。 延迟-累加波束法和后置自适应滤波法适用于非相干噪声和弱相干噪声消除;而自适应波束法适用于消除相干噪声,对非相干噪声或散射噪声消除效果较差。 |
【本文地址】
今日新闻 |
推荐新闻 |