|
目录
前言
一、数字式相位干涉仪
二、一维长短基线干涉仪测向算法
三、代码实现
前言
本节介绍一种采用一维长短基线法测DOA的算法,供大家参考学习。
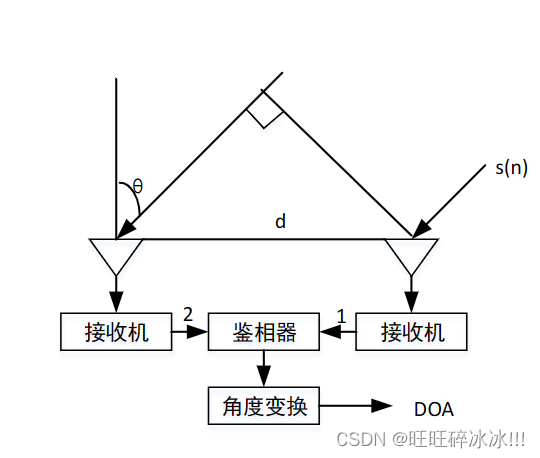
一、数字式相位干涉仪
首先介绍数字式相位干涉仪,两部天线接收信号,会产生相位差,由相位差可得到入射角 ,即可完成测向。 ,即可完成测向。
其中,两天线接收信号为


其中:


则两天线接收信号的相位差为

二、一维长短基线干涉仪测向算法
假设一维长短基线干涉仪的天线阵列结构如图所示。其中基线长度分别为 和 和 。图中辐射源的方位角定义为辐射源与参考原点的连线与 横轴正向的夹角,即取值范围为 。图中辐射源的方位角定义为辐射源与参考原点的连线与 横轴正向的夹角,即取值范围为 。 。

如果假设辐射源的波长为 ,则根据以上阵列结构和辐射源空间位置,可得天线 2、3与参考阵元1的接收信号相位差分别为 ,则根据以上阵列结构和辐射源空间位置,可得天线 2、3与参考阵元1的接收信号相位差分别为


为了解相位模糊,对短基线的选择准则是:由该基线构成的相位干涉仪能够对辐射源在半空间范围内无模糊的单值测向。也就是说,选择使得
 , ,
即

对于长基线,由于其长度大于 ,因此该基线所对应天线接收信号的相位差 ,因此该基线所对应天线接收信号的相位差 将超出 将超出 的范围,无法实现目标方位角的准确求解,此时就需要短基线来求解长基线的相位模糊。 的范围,无法实现目标方位角的准确求解,此时就需要短基线来求解长基线的相位模糊。
因此,对于长短基线干涉仪测向,短基线主要用于解模糊,而长基线主要用于提高测向精度。
假设各天线接收的复信号为

为了简化分析,忽略时间t,仅考虑相位为 ,则各基线对应的相位差为 ,则各基线对应的相位差为


由于信号相位![\varphi _{i}\in [-\pi ,\pi ]](https://latex.csdn.net/eq?%5Cvarphi%20_%7Bi%7D%5Cin%20%5B-%5Cpi%20%2C%5Cpi%20%5D) ,故当短基线小于半波长,而长基线大于半波长时 ,故当短基线小于半波长,而长基线大于半波长时 与 与 (i=2,3)有如下关系: (i=2,3)有如下关系:


因此,对于长短基线法,其核心就在于求取
由于

可以得到,

再由

得

最后利用

可得

由于

因此方位角可从下式求得:

三、代码实现
%%线阵测DOA
clc;
clear all;
close all;
%% 雷达信号参数
c= 3e8;
radar_f = 50e6;%频率
lamda = c/radar_f;%波长
radar_theta = 60*2*pi/360;%入射角
pw = 0.5e-6;%脉宽
%% 干涉仪参数
d1= 2;
d2=30;
fs=500e6;
t=0:1/fs:pw-1/fs;
%% 距离差求取时延差
tau1=d1*sin(radar_theta)/c;
tau2=d2*sin(radar_theta)/c;
%% 到达三个天线的信号
x1=exp(1i*2*pi*radar_f*t);
x2=exp(1i*2*pi*radar_f*(t-tau1));
x3=exp(1i*2*pi*radar_f*(t-tau2));
% %% 天线间的相位差
diffPhase1 = mean(angle(x1.*conj(x2)));%%获取1,2号天线的相位差,保证无模糊
diffPhase2 = mean(angle(x1.*conj(x3)));%%获取1,3号天线的相位差,保证精确估计DOA
%% DOA估计
%求取k
k = (d2*diffPhase1/d1 -diffPhase2)/(2*pi);
C1 = lamda*(diffPhase2+k*2*pi)/(2*pi*d2);
theta = asin(C1)*360/(2*pi);
|