坐标旋转变换公式的推导 |
您所在的位置:网站首页 › 坐标轴绕原点旋转公式 › 坐标旋转变换公式的推导 |
坐标旋转变换公式的推导
|
翻译: 汤 永康 出处: 地址 转贴请注明出处 1 围绕原点的旋转 如下图, 在2维坐标上,有一点p(x, y) , 直线opの长度为r, 直线op和x轴的正向的夹角为a。 直线op围绕原点做逆时针方向b度的旋转,到达p’ (s,t)
用行列式表达如下:
2.座标系的旋转 在原坐标系xoy中, 绕原点沿逆时针方向旋转theta度, 变成座标系 sot。 设有某点p,在原坐标系中的坐标为 (x, y), 旋转后的新坐标为(s, t)。
用行列式表达如下:
而您一旦用以下这图解方法,随时眼见显然,再也不会搞错。 |
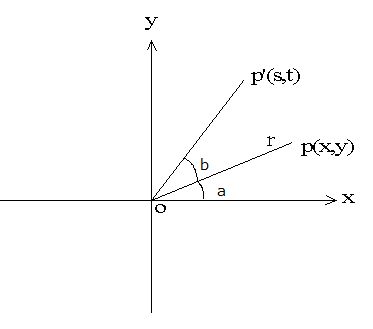 s = r cos(a + b) = r cos(a)cos(b) – r sin(a)sin(b) (1.1) t = r sin(a + b) = r sin(a)cos(b) + r cos(a) sin(b) (1.2) 其中 x = r cos(a) , y = r sin(a) 代入(1.1), (1.2) , s = x cos(b) – y sin(b) (1.3) t = x sin(b) + y cos(b) (1.4)
s = r cos(a + b) = r cos(a)cos(b) – r sin(a)sin(b) (1.1) t = r sin(a + b) = r sin(a)cos(b) + r cos(a) sin(b) (1.2) 其中 x = r cos(a) , y = r sin(a) 代入(1.1), (1.2) , s = x cos(b) – y sin(b) (1.3) t = x sin(b) + y cos(b) (1.4)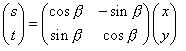
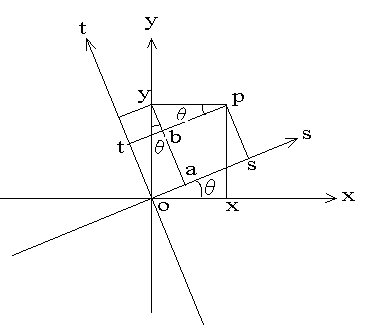 oa = y sin(theta) (2.1) as = x cos(theta) (2.2) 综合(2.1),(2.2) 2式 s = os = oa + as = x cos(theta) + y sin(theta) t = ot = ay – ab = y cos(theta) – x sin(theta)
oa = y sin(theta) (2.1) as = x cos(theta) (2.2) 综合(2.1),(2.2) 2式 s = os = oa + as = x cos(theta) + y sin(theta) t = ot = ay – ab = y cos(theta) – x sin(theta)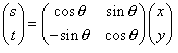

【本文地址】
今日新闻 |
推荐新闻 |