两种图像骨架提取算法的研究(1)原理部分 |
您所在的位置:网站首页 › 图像识别基本原理方法有哪些类型 › 两种图像骨架提取算法的研究(1)原理部分 |
两种图像骨架提取算法的研究(1)原理部分
|
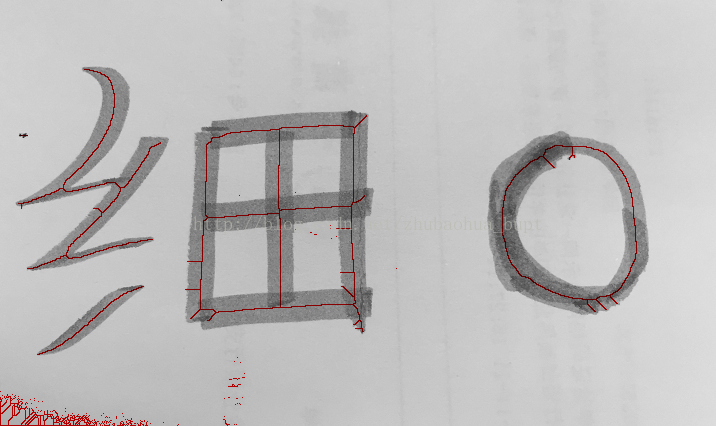
图像骨架提取,实际上就是提取目标在图像上的中心像素轮廓。说白了就是以目标中心为准,对目标进行细化, 一般细化后的目标都是单层像素宽度。比如输入图像是这样:
输出骨架图像(红色) 关于骨架提取,现存的算法有一千种以上(论文[1]中谈到,There are more than one thousand algorithms thathave been published on this topic)。论文[1]中提到,所有的骨架提取算法无外乎分为迭代和非迭代两大类。在迭代算法中,又分为并行迭代和顺序迭代两种。 本文分别介绍两种提取算法,它们分别来源于论文[1](K3M顺序迭代)、[2](Zhang-Suenalgorithm,并行迭代)。 这两种方法都是对二值图像操作的,思想都是从目标外围往目标中心,利用以待检测像素为中心3*3像素窗口的特征,对目标不断腐蚀细化,直至腐蚀到不能再腐蚀(单层像素宽度),就得到了图像的骨架。下面详细介绍一下两种骨架提取算法。 一 K3M该算法的思想是,提取目标外围轮廓,然后利用轮廓腐蚀目标图像边界(这是一次迭代过程), 直至腐蚀到不能再腐蚀。
算法分为两块
第一块,不断腐蚀,提取出伪骨架(部分区域有两层像素宽度,但已经很接近真实骨架)。 第二块,从伪骨架中提取真实骨架。 第一块:提取出伪骨架
每次迭代共有6步。不断迭代,直至某次迭代的过程,目标边界中没有新的像素被腐蚀,那么此时,剩余的目标图像像素就很接近于真实骨架(称之为伪骨架)。 提取最新目标轮廓(初始为原目标轮廓)并记录这些轮廓点。
依次检测这些轮廓点的8像素邻域,是否只含有3连通像素,如果有,把此点从轮廓点删除,并在目标图像中删除(腐蚀掉)对应点。
依次检测中剩余轮廓点的8像素邻域,是否只含有3 or 4连通像素,如果有,把此点从轮廓点删除,并在目标图像中删除(腐蚀掉)对应点。
依次检测中剩余轮廓点的8像素邻域,是否只含有3 or 4 or 5连通像素,如果有,把此点从轮廓点删除,并在目标图像中删除(腐蚀掉)对应点。
依次检测中剩余轮廓点的8像素邻域,是否只含有3 or 4 or 5 or 6连通像素,如果有,把此点从轮廓点删除,并在目标图像中删除(腐蚀掉)对应点。
依次检测中剩余轮廓点的8像素邻域,是否只含有3 or 4 or 5 or 6 or 7连通像素, 如果有,把此点从轮廓点删除,并在目标图像中删除(腐蚀掉)对应点。 这是一次迭代过程的最后一步,如果在这步骤中仍有像素被腐蚀, 说明除了真实骨架还有”肉”,仍需继续腐蚀边界。这一步骤是算法迭代的终止条件。
第二块 从伪骨架中提取真实骨架。
算法第一块得到的伪骨架有部分区域是两个像素宽度,而目标骨架是单层像素宽度。所以,通过下面这一步骤提取最终骨架: 依次检测目标图像中,伪骨架的8像素邻域,是否只含有2 or 3 or 4 or 5 or 6 or 7连通像素,如果有,把此点从伪骨架中删除(腐蚀),就得了最终的骨架。 该论文对像素p的8邻域进行了权重编码:对判断像素点p周围8邻域的最大连通区域,是否只含有n(2 |

【本文地址】
今日新闻 |
推荐新闻 |