数字图像处理之图像复原理论理解篇 |
您所在的位置:网站首页 › 图像处理的模型假设 › 数字图像处理之图像复原理论理解篇 |
数字图像处理之图像复原理论理解篇
|
数字图像处理之图像复原理论理解篇
一、基本概念
是复原被退化的图像 那么我们需要了解的是,图像是如何被退化的,要知道退化函数 图像复原与图像增强的区别 前者:突出图像中感兴趣的特征,衰减不需要的信息 后者:针对图像的退化原因去补偿,需要对退化过程有一定的先验知识 退化函数和外加噪声信息知道得越多,越容易使恢复出来的图像逼近原始图像 二、图像退化模型
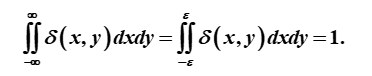
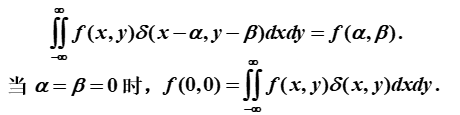
(1)H是线性的 H(k1f1(x,y)+k2f2(x,y))=k1H(f1(x,y))+k2H(f2(x,y)); (2)H是空间(或移位)不变的 若H(f(x,y))=g(x,y); H(F(x-a,y-b))=g(x-a,y-b); 采用线性位移不变模型理由: (1)大多数退化都可以用线性位移不变模型来近似 (2)当退化不太严重时,用线性位移不变系统模型复原图像,在很多应用中有较好的结果 (3)尽管非线性和位移可变的情况能更加准确地反映图像复原问题的本质,但在数学上求解困难。 2、连续退化模型 (1)点源一幅图像可以看成是无穷个极小的像素点构成,每个像素可看做一个点源成像,因此,一幅图片可看做是无穷个点源形成的。 数学上,点源可用二维狄拉克函数δ(x,y)表示
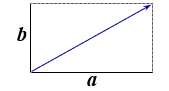
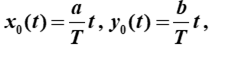
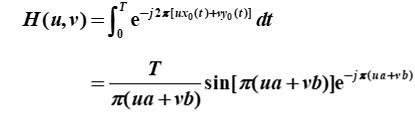
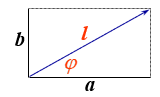
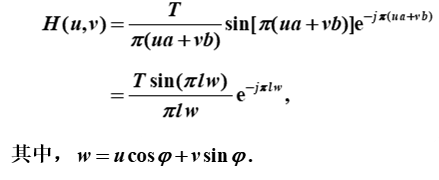
匀速直线运动
退化模型 当H(u,v)=0时,复原图像没有意义 在H(u,v)等于0附近,由噪声带来的误差非常大 改进1 在H(u,v)等于0附近,重新设置H(u,v)的值 准则:使原始图像与复原图像的均方误差达到最小 准则:使复原图像的二阶导数最小 图像在获取过程中,由于成像系统本身的因素以及拍摄者人为因素的影响,会使获得的图像产生几何畸变。 几何畸变分为系统畸变和非系统畸变 前者是有规律的,能预测的 后者是随机的 (2)几何校正定义:以一幅图像为基准,去校正另一种方式摄入的图像,以校正其几何畸变,就称为图像的几何畸变复原或者几何畸变校正 (3)几何校正步骤1、建立原始图像与校正后图像的坐标系 2、选择几何畸变模型 3、确定控制点,并求得模型参数 4、空间坐标变换 5、像素灰度差值 6、几何校正的精度分析 (a)空间坐标变换首先要建立需要校正的图像和基准图像的像素点坐标的映射关系,然后根据映射关系对图像各个像素点坐标进行校正 通常可用线性畸变来近似较小的几何畸变 线性畸变 二次畸变
空间坐标变换分为直接法和间接法两种 (1)直接法 该图像像素分布是不规则的,会出现像素挤压、疏密不均匀等现象 因此最后还需要对不规则图像通过灰度内插生成规则的栅格图像 (2)间接法 由于(x’,y’)一般不为整数,不会正好位于畸变图像的像素点处,因而不能直接确定该点的像素值 在畸变图像熵,由该像素点周围的像素灰度值通过内插,求出该像素点的灰度值,由此得到校正图像 由于间接法内插灰度值容易,一般采用间接法 6、像素灰度内插 (1)最近邻插值法在待求点的四邻像素中,将距离该点最近的相邻像素的灰度赋给该待求点 校正后图像有明显锯齿状,即存在灰度不连续性 (2)双线性内插法利用待求点的四个邻像素的灰度在两个方向上做线性内插 利用分段三次多项式s(x)代替最佳插值函数sin(x)/x |
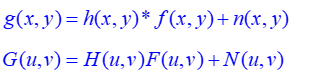
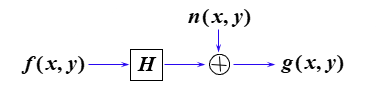 H为降质模型
H为降质模型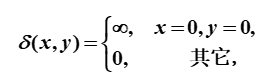

 加噪情况
加噪情况 获取H(u,v)三种途径: (1)已知 (2)估计 (3)数学建模 总而言之,H(u,v)一定是知道的
获取H(u,v)三种途径: (1)已知 (2)估计 (3)数学建模 总而言之,H(u,v)一定是知道的


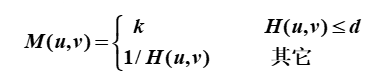 改进2 让逆滤波函数具有低通滤波的性质(降噪)
改进2 让逆滤波函数具有低通滤波的性质(降噪) 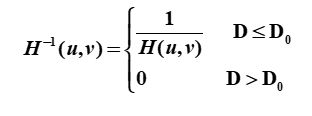
 当原始图像功率谱未知 维纳滤波可近似为
当原始图像功率谱未知 维纳滤波可近似为 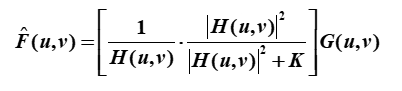 维纳滤波特点: (1)在H(u,v)~0时,有病态现象 (2)当信噪比较高时,同反向滤波法一样好 (3)当信噪比较低时,效果不满意,一样糟糕 原因: 最小均方误差准则与人的视觉准则不一定匹配
维纳滤波特点: (1)在H(u,v)~0时,有病态现象 (2)当信噪比较高时,同反向滤波法一样好 (3)当信噪比较低时,效果不满意,一样糟糕 原因: 最小均方误差准则与人的视觉准则不一定匹配
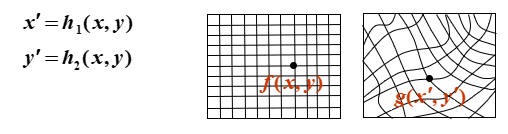 一般描述 通常h1(x,y)和h2(x,y)用多项式表示
一般描述 通常h1(x,y)和h2(x,y)用多项式表示 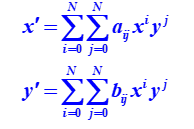 进一步用选定的若干像素点(同名像点)来确定系数
进一步用选定的若干像素点(同名像点)来确定系数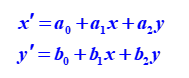 6个未知数,至少需要三对同名像点来建立方程
6个未知数,至少需要三对同名像点来建立方程 包含12个未知数,至少需要6对同名像点来建立方程
包含12个未知数,至少需要6对同名像点来建立方程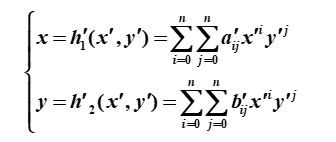 利用若干已知点求出系数,再通过畸变图像代入求出校正图像坐标
利用若干已知点求出系数,再通过畸变图像代入求出校正图像坐标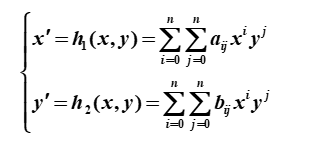 求出系数 然后在基准坐标系统下,从等距的网格交叉点(x,y)出发,根据上述关系一次计算出各等距网点在已知畸变图像上的坐标(x’,y’)
求出系数 然后在基准坐标系统下,从等距的网格交叉点(x,y)出发,根据上述关系一次计算出各等距网点在已知畸变图像上的坐标(x’,y’) 方法比最近邻插值法复杂,计算量大 没有灰度不连续的缺点 它具有低通滤波的性质,使高频分量受损,轮廓有一定模糊
方法比最近邻插值法复杂,计算量大 没有灰度不连续的缺点 它具有低通滤波的性质,使高频分量受损,轮廓有一定模糊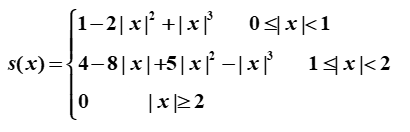 待求像素(x,y)的灰度值由其周围十六个点的灰度值加权内插得到 待求像素灰度值计算式:
待求像素(x,y)的灰度值由其周围十六个点的灰度值加权内插得到 待求像素灰度值计算式: 
 计算量最大,内插效果最好,精度最高
计算量最大,内插效果最好,精度最高【本文地址】
今日新闻 |
推荐新闻 |