CloudCompare软件操作学习笔记(二) |
您所在的位置:网站首页 › 国清寺景点开放时间 › CloudCompare软件操作学习笔记(二) |
CloudCompare软件操作学习笔记(二)
|
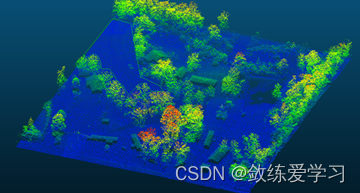
1. 剪裁
方法一:用上方操作窗口的
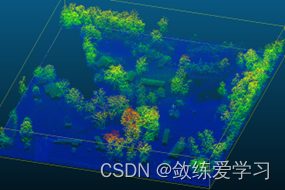
选中区域 Segment out Segment in 2.点云分割segmentation > Label Connected Components:设置最小距离,把所选的云分割成更小的部分,每一部分相互连接,按最小距离将点云分割。
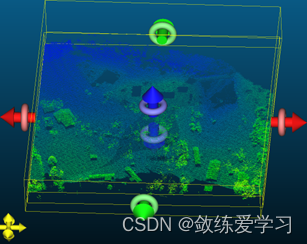
3.横截面: 使用Tools > Segmentation > Cross Section访问此工具(该工具可以用来在一个或多个维度中重复进行分段即获得多个切片;以及在每个切片中提取多边形轮廓) 编辑裁剪框:可以采用交互式的方式拖动大红色,绿色和蓝色箭头和圆环,直接在3D视图中移动剪切框边界;也可以使用“X”,“Y”和“Z”字段直接编辑裁剪框的尺寸(宽度,深度和高度) 一些参数的设置:Repeat dimension:设置提取的纬度(默认情况下,只会检查“平面”维度); Gap:相邻切片之间的空隙距离;flat dimension:平面尺寸,根据当前截面尺寸自动设置; maximum edge length:最大边长,“凹包”算法提取轮廓,从切片点的凸包开始。
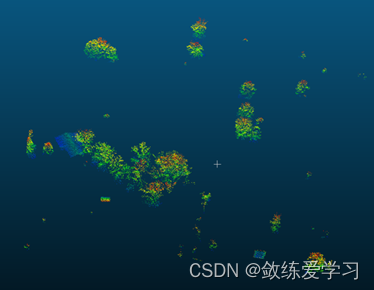
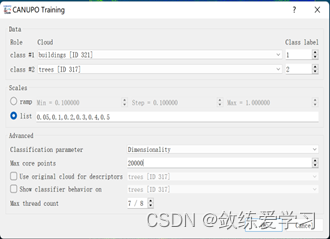
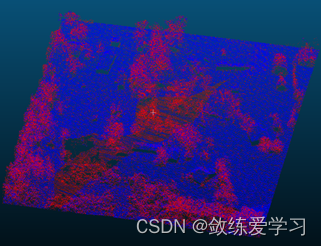
4. canupo分类: 先手动分割代表每个类的几组点(剪刀工具)。对于每个类,获取几个典型的点子集,并将它们重新分组到单个云中(编辑->合并),再用plunge中的canupo插件创建训练集,保存训练集用,用它对原始点云进行分类
创建训练集 分类结果 5.mesh:流程:点云简单地在XY平面上进行2D投影;对相应的2D点进行三角剖分;将网格结构应用于3D点。 用菜单栏的'Edit > Mesh > Delaunay 2.5D (XY plane)',指定三角形边的最大长度,移除不一定有意义的最大三角形,如果该值保持为零,则会保留Delaunay三角剖分输出的所有三角形 适用于表面较为平坦和具有适当定向(即Z维度为垂直的)的点云,如果点云没有正确定向但在某个方向上仍然相当平坦,则应考虑使用此方法的另一个版本'Mesh> Delaunay 2.5D(best fitting plane)。
Max edge length=20 Max edge length=10 6.提取边界:首先用'Edit > Normals > Compute' 或‘Edit->Normals- > Orient Normals- > With Minimum Spanning Tree’提取法向量,再用plunge中的PCL插件提取边缘
|

【本文地址】
今日新闻 |
推荐新闻 |