[SARscape] (零)ENVI/SARscape介绍、SAR数据处理常用步骤、工具集说明 |
您所在的位置:网站首页 › 哨兵影像怎么打开 › [SARscape] (零)ENVI/SARscape介绍、SAR数据处理常用步骤、工具集说明 |
[SARscape] (零)ENVI/SARscape介绍、SAR数据处理常用步骤、工具集说明
|
文章目录
SARscape介绍ENVI软件介绍SAR数据处理常用步骤单景雷达影像处理多时相SAR数据处理
基础工具设置导入去斑点噪声多视滤波
配准地理编码与辐射定标(求后向散射系数)时序分析信息提取
InSAR工具基线估算干涉图生成自适应滤波及相干性相位解缠轨道精炼和重去平(选择GCP)相位高程转换
相关链接
SARscape介绍
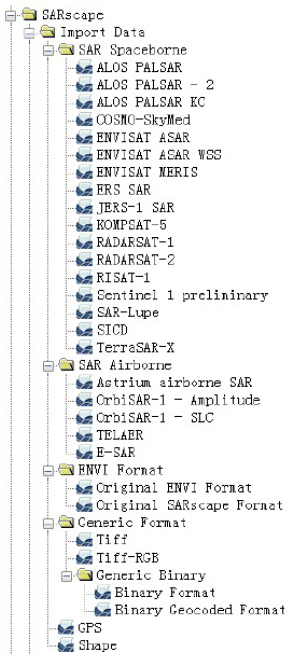
【SARscape】由瑞士SARmap公司开发的高级雷达图像处理软件。特点:架构于ENVI软件之上;SAR与光学结合;与ArcGIS无缝集成(SARscape格式的数据直接在ArcGIS可以使用) 【功能】 1.数据读取:航天传感器、航空传感器、常见文件格式、RAW数据 2.数据分析:SAR图像解译、InSAR处理、地球物理建模、干涉叠加分析、极化雷达分析 3.成果应用:DEM提取、地表形变监测、形变源分析、地表动态监测、地表覆盖监测 ENVI软件介绍【ENVI软件目录介绍】
【步骤】以8幅多幅Sentinel-1为例 1.导入: 2.配准:将8幅的Sentinel-1进行配准 3.滤波:De Grandi Spatio-Temporal Filtering对多景_rsp文件一起进行滤波,比单景更好 4.地理编码:此是哨兵数据,将分辨率设置为20。此步结束即得到后向散射系数 基础工具1.Import Data:导入 2.Basic:基础工具(多视、滤波、地理编码、辐射定标等) 3.Gamma and Gaussion Filtering:滤波扩展模块 4.Focusing:聚焦。支持ALOS、Sentinel-1、ASAR、ERS-JERS数据,或按照规则自主组织数据 5.Interferometry:干涉。相干性变化监测、生产DEM的工具流、DInSAR形变、 建模、通用InSAR工具、相位处理(Phase Processing) 6.Interferometric Stacking:干涉叠加。PS、SBAS 7.ScanSAR Interferometry 8.Polarimetry and PolInASR 9.General Tools 设置【设置默认路径】File-->Preference-->Directories 【软件使用的内存】管理员身份运行ENVI Classic-->File-->Preference-->Miscellaneous-->Memory Usage 1.Cache Size:建议设置成电脑配置的一半 2.Image Tile Size:数据分块大小,8G以上设置为100,4G设置4Mb 【SARscape系统设置】SARscape-->Preference 1.General parameters->OpenCL Platform Name:选择GUI加速的显卡 2.Load Preferences:参数说明 【导入】生成SARscape能够识别的数据格式 【Input支持的数据类型】标准雷达格式、ENVI标准格式、一般二进制文件、有地理编码的二进制文件、GPS数据、航空SAR、矢量数据、特殊格式(ALOS PALSAR KC、ALOS GEO Grid)、Tiff格式、ASCII ArcGIS格式 【Output】生成ENVI及SARscape格式的文件 【工具】 【SAR图像的斑点噪声】SAR是相干系统,斑点噪声是其固有特性均匀的区域,图像表现出明显的亮度随机变化,与分辨率、极化、入射角没有直接关系,属于乘机噪声。多视和滤波可以抑制斑点噪声。 多视【多视处理】在图像的距离向和方位向上的分辨率做平均,目的是为了抑制SAR图像的斑点噪声。多视的图像提高了辐射分辨率,降低了空间分辨率 【工具】/SARscape/Basic/Intensity Processing/Multilooking 【多视结果】_pwr文件 【地面分辨率】Pixel Spacing slant range /sin(incidence angle) 20 4 4 地距分辨率=4.733/sin(20.845)=13.295米,距离向视数为1 方位向分辨率经过多视后保持与地距分辨率一致,方位向视数为13.295/4.8717≈3 滤波【滤波】 单波段雷达图像滤波:Mean、Median、Mode、EPS、Frost(常用)、Lee、Anisotropic NonLinear Diffusion多时相雷达图像滤波:De Grandi、Anisotropic NonLinear Diffusion【滤波结果】_fil文件 【工具】 1.基础模块:/SARscape/Basic/Intensity Processing/Filtering/... 2.滤波扩展模块:/SARscape/Gamma and Gaussan Filtering/... 【说明】 1.Data type:single pol一种极化方式,dul pol多种极化方式 配准【作用】将多幅SAR影像进行地理配准,统一栅格单元的位置 【工具位置】SARscape-->Basic-->Intensity Processing-->Coregistration 【配准结果】_rsp文件。若没有配准好,将多景进行彩色显示,会产生重影 【说明】 1.Input File List:参与配准的SAR影像(_pwr强度数据) 2.Input Reference File:配准的主影像(_pwr强度数据) 3.DEM File:可选项(_dem文件)。若是Sentinel数据必须提供,哨兵数据就是基于DEM进行配准的 4.Coregistration With DEM:是否用DEM配准 地理编码与辐射定标(求后向散射系数)【后向散射】SAR系统测量发射和返回脉冲的功率比 【操作目的】不同SAR传感器有不同的接收模式,为了更好的对比SAR图像几何和辐射特征,需要将SAR数据从斜距或地距投影转换为地理坐标系(后向散射被投影为斜距几何) 【工具】/SARscape/Basic/Intensity Processing/Geocoding/Geocoding and Radiometric Calibration 1.Optional Files-->Input Area File:裁剪的子区域 2.Radiometric Normalization:辐射定标(True即求后向散射系数) 3.Local Incidence Angle:是否输出局部入射角 4.Layover/Shadow:是否输出叠掩和阴影的区域(无信号或信号错误的区域) 【结果】 1._geo文件 2._geo_meta:若是多景进行地理编码,此文件即是将这多景影像组织在一起 【定标后处理】距离校正、介电常数影响校正、绝对校正 【相关处理】辐射归一化、局部入射角校正、叠掩/阴影处理 【应用算法】SAR系统引起的为非线性畸变,尤其是地形起伏较大的地方,所以不能像光学影像一样用多项式校正或仿射变换,要用到严格的多普勒算法,结合传感器和成像特点以及地面形态 【处理类型】地理编码、几何配准、几何校正、正射校正、概念是相似的,即把SAR图像,无论是斜距几何还是地距几何,转换成地图坐标系,区别在于是否用DEM 椭球体地理编码(处理过程不用DEM数据)地形地理编码(处理过程需要DEM) 【后向散射定标】为了对比不同的传感器获取的同一区域影响;同一传感器以不同的工作模式获取的影像;同一传感器不同时相的数据;使用不同的处理方法来计算【相关名词】
【工具位置】SARscape-->Time Series Analyzer 【输入】 1.打开的是meta多时相多波段的组合数据 2.点击图上位置,选择Plot进行绘制该点在时序上的变化曲线 信息提取【工具位置】SARscape-->Classification/Classification Workflow 【说明】 1.选择栅格数据:Input Raster-->Raster File 2.选择子区域:Input Raster-->Browse..-->Spatial Subset-->框选感兴趣区域 or 选择shp文件 3.选择掩膜文件:Input Mask 4.选择监督分类:Use Training Data 5.然后框选样本 6.小斑块处理:Cleaup可调节参数(越大处理的越厉害),点击Preview可进行预览 7.输出结果 InSAR工具 基线估算(1)基线估算的背景 【空间基线】卫星两次拍摄的位置是有一定的距离的,这个距离称为空间基线 【失相干】如果空间基线较长,两个数据就有可能失相干(即相位之间没有干涉信息)。故空间基线要满足一定的阈值,才能够进行InSAR分析 【时间基线】两次拍摄的时间相隔太长也会导致失相干(此为时间失相干) 只有在获得地面反射至少有两个天线重叠的时候才可以产生干涉,当基线垂直分量超过了临界值的时候,没有位相信息,相干性丢失,就无法做干涉 (2)基线估算的作用 用来评价干涉影像对的质量。计算基线、轨道偏移(距离向和方位向)和其他系统参数。 (3)基线估算的工具 基线估算有两个工具 两景数据:SARScape-->Interferometry-->Interferometric Tools-->Baseline Estimation多景数据:SARscape-->Interferometry-->Interferometric Tools-->Multi Baseline Calculation(4)Baseline Estimation工具(两景数据的基线估算)说明 工具位置:SARScape-->Interferometry-->Interferometric Tools-->Baseline Estimation 操作说明: Input Master File:输入主影像,一般更早的那景为主影像Optional Files-->Output Baseline Root Name:可选,即输出结果。若不填即表示计算完打印一下就好,不输出到文件中结果说明: 结果说明Normal Baseline(m) = 180.504空间基线,在拍摄时两个传感器间隔的距离180.504米Critical Baseline min-max(m) = [-6400.098] - [6400.098]临界基线,即若空间基线大于6400.098表示两个数据失相干了。一般在应用中需要小于临界基线的十分之一Absolute Time Baseline (Days)=1时间基线Range Shift (pixels) = 0.515 Azimuth Shift (pixels)=0.038数据在方面向、距离向的偏移量,之后可以通过配准来校正2 PI Ambiguity height (InSAR) (m) = 58.9252PI模糊高程(即一周期的相位变化对应的高程变化)。相位变化是周期性的,相位变化2PI对应的高程变化量是58.925。此参数越小,高程测量的精度越高。此参数与空间基线是反比关系。2 PI Ambiguity displacement (DInSAR) (m) = 0.016DInSAR精度为0.0161 Pixel Shift Ambiguity height(Stereo Radargrammetry) (m) = 6285.378立体量测的精度6285.378m(哨兵数据适合做InSAR、不适合应用于立体量测)1 Pixel Shift Ambiguity displacement (Amplitude Tracking (m) = 1.666振幅偏移量测,做大的形变(完全失相干的形变,如滑坡、冰川移动等)的精度是1.666米Master Incidence Angle = 48.963 Absolute Incidence Angle difference = 0.011主影像入射角48.963,主从影像相差0.011 干涉图生成(1) 工具说明 【工具】SARscape-->Interferometry-->Interferogram generation-->With DEM 【输入】两景主从影像 【输出】 1.经配准和多视的两景数据的干涉图(_int) 2.主从影像的强度图(_pwr) 说明:距离向=1,方位向=4的多视,约可得到15m的地面分辨率 (2)背景 干涉条纹:即是干涉相位图形化显示的结果,可以打开*_int_ql.tif干涉快视图进行查看 一个颜色周期就代表相位的一次2π变化:红色-黄色-蓝绿色为一个完整的2PI变化周期干涉条纹越密集,此地方的地表高程变化越大,起伏的越厉害。这些是要保留下来的地形相位间隔相同,有规律的条纹是由于平地效应所造成的,可以通过去平工具去除
【工具】SARscape-->Interferometry-->Adaptive Filter and Coherence Generation-->Boxcar Window 【作用】对上一步去平后的干涉图(_dint)进行滤波,去掉由平地干涉引起的位相噪声。同时,生成干涉的相干图(描述位相质量)和滤波后的主影像强度图 滤波方式可选用Boxcar,以去除由平地干涉引起的相位噪声相干性系数的计算可为轨道精炼和重去平提供帮助加载滤波后的_fint图像和上一步中的_dint图像对比。加载相干性图,打开CursorLocation/Value查看像元值,相干性系数分布在0-1,值越大说明该区域的相干性越高,值越小,表明该区域在两个时相上发生了变化。 相位解缠【工具】SARscape-->Interferometry-->Phase Unwrapping 【作用】干涉相位只能以2π为模,所以只要相位变化超过了2π,就回重新开始循环。 相位解缠是对去平和滤波后的位相进行相位解缠,解决2π模糊的问题 【输入】 Interferogram file 上一步生成的滤波后的_fint图像(或去平后的差分干涉图_dint)Coherence file 上一步生成的相干性图像_cc区域增长法解缠算法Region Growing相干性阈值Coherence threshold分解等级Decomposition levels【轨道参数修正】 当输入精确的轨道信息如DORIS,为了校正相位偏移,所以要进行轨道参数的修正,矫正的结果不会生成新的数据文件,而是将解缠后相位头文件的信息做了修正。为了进行这一步,需要地面控制点文件,这个控制点必须要分布在整景图像上,避免选择地形残差条纹区域,尽量选择平地区域【操作】选择GCP,用于轨道精炼 相位高程转换【作用】将经过绝对校准和解缠的实际相位,结合合成相位,生成进行过地理编码的DEM文件 相关链接 技术支持邮箱:[email protected]/IDL技术博客ENVI/IDL视频:优酷用户ENVIIDL中国InSAR技术优秀博文 |
 【ENVI数据格式】有两个文件构成
【ENVI数据格式】有两个文件构成 【步骤】顺序可以改变,看实际实际情况 1.导入 2.多视 3.滤波 4.地理编码和辐射定标
【步骤】顺序可以改变,看实际实际情况 1.导入 2.多视 3.滤波 4.地理编码和辐射定标




 去平之后的干涉图像:去除间隔相同,由平地效应造成的干涉条纹。保留因地形起伏、高程起伏所导致的干涉条纹。可以打开*_dint_ql.tif来查看。接下来就是进行滤波,去除一些噪声,让干涉条纹变得更加平滑。
去平之后的干涉图像:去除间隔相同,由平地效应造成的干涉条纹。保留因地形起伏、高程起伏所导致的干涉条纹。可以打开*_dint_ql.tif来查看。接下来就是进行滤波,去除一些噪声,让干涉条纹变得更加平滑。
【本文地址】