双目视觉三维成像原理 |
您所在的位置:网站首页 › 双目立体视觉三维测量原理 › 双目视觉三维成像原理 |
双目视觉三维成像原理
|
双目视觉三维成像原理
参考:《计算机双目立体视觉》高宏伟 碎碎念,有道云真难用啊 立体几何成像法其实就是双目视差的原理,但是因为噪声的存在,这种方法的精度不高,所以这里也不重点说,仅给出公式与模型图片,有兴趣的可以根据图片自己推一下式子,就是一个相似三角形的关系(P,Pl,Pr三角形与P,左光心,右光心三角形),推导不算难。 这个方法很重要,下面给出其推导过程 我们把左相机的内参,外参相乘 得到一个投影矩阵M1,右相机M2同理 (不懂得可以先看一看相机标定的相关博客) 同时左相机的[u1,v1]与右相机的[u2,v2]描述的是三维空间中的同一点,也就是立体匹配的同名点
同理,有 由于噪声的存在,可以用四个方程求解三个未知数,就是一个超定方程,写成矩阵形式 |
 根据视差计算三维点坐标的公式 d为视差
根据视差计算三维点坐标的公式 d为视差
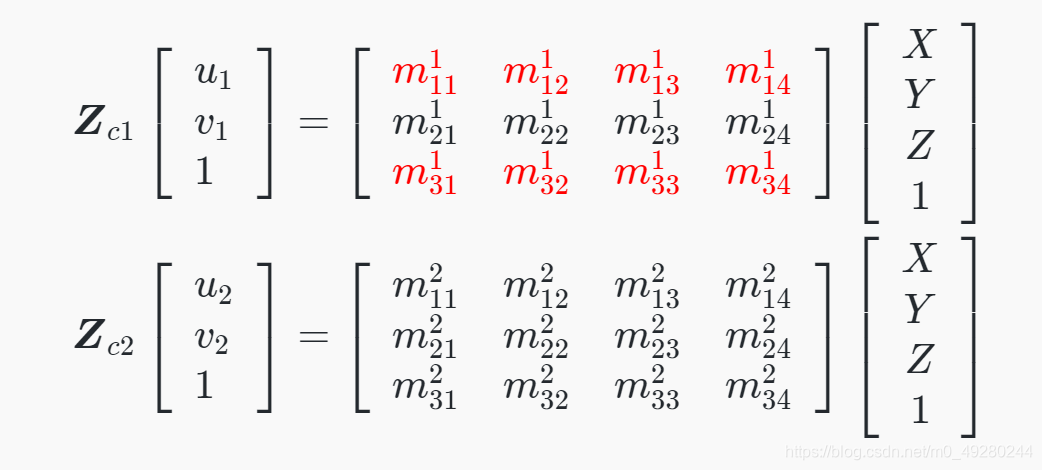 只关注红色部分,我们把矩阵拆开,构造方程组
只关注红色部分,我们把矩阵拆开,构造方程组  把第二个方程乘以u1 与减去第一个方程,得到
把第二个方程乘以u1 与减去第一个方程,得到  这个形式其实就是三维空间中的一个平面方程
这个形式其实就是三维空间中的一个平面方程 
 两个平面的联立,可以确定一个空间直线方程,四个方程则确定了两条直线的交点, 观察下图,这四个方程描述的物理意义就是,OP1与OP2交于P点**(妙啊)**
两个平面的联立,可以确定一个空间直线方程,四个方程则确定了两条直线的交点, 观察下图,这四个方程描述的物理意义就是,OP1与OP2交于P点**(妙啊)** 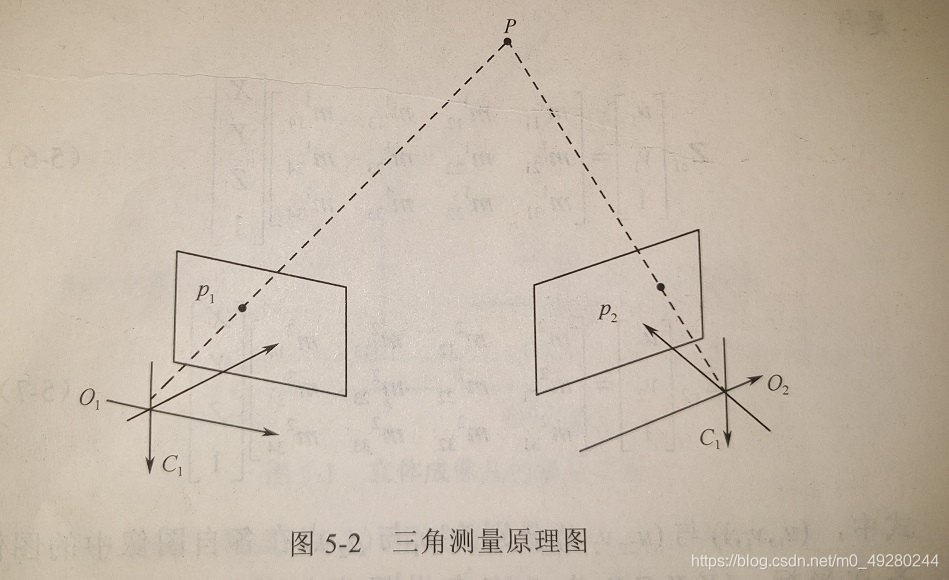
 简写为
简写为  三维点坐标的最小二乘解不知道下式为什么是最小二乘解可以看这里:
三维点坐标的最小二乘解不知道下式为什么是最小二乘解可以看这里:  也就是,通过左右相机的对应点,通过构造矩阵方程,可以求解出空间中的三维点坐标
也就是,通过左右相机的对应点,通过构造矩阵方程,可以求解出空间中的三维点坐标【本文地址】
今日新闻 |
推荐新闻 |