一种振动压路机作业性能智能检测方法、系统及设备介质 |
您所在的位置:网站首页 › 压路机性能指标参数 › 一种振动压路机作业性能智能检测方法、系统及设备介质 |
一种振动压路机作业性能智能检测方法、系统及设备介质
 本发明属于压路机领域,涉及一种振动压路机作业性能智能检测方法、系统及设备介质。 背景技术: 1、振动压路机在摊铺好的混合料上进行振动压实,并准确地保证混合料的平整度和密实度,广泛用于公路、城市道路、机场跑道、体育场等工程作业中。压路机主要由钢轮、激振器、机架、驾驶室组成。 2、施工过程中,为了提高混合料的强度及表面平整度,需要保证振动压路机工作平稳、混合料的压实度达到国标要求。因此需要对振动压路机的作业性能进行检测,振动压路机的作业性能包括作业性能和压实能力两部分。 3、振动压路机作业能力的目前使用的智能评判指标为压实计值(cmv),cmv的计算基于振动的非线性响应,即土壤在振动作用下会生成二次谐波。但是,土壤组分非常复杂,非线性响应变化很大,谐波分量评估压实度偏差很大,实用效果比较差。同时钢轮是一个结构比较大的刚体,单点振动很难反应整体振动状态和特征,预测准确性有限。 技术实现思路 1、本发明的目的在于克服上述现有技术的缺点,提供一种振动压路机作业性能智能检测方法、系统及设备介质,提高了振动压路机作业性能智能检测的准确性。 2、为达到上述目的,本发明采用以下技术方案予以实现: 3、一种振动压路机作业性能智能检测方法,包括以下步骤: 4、s1,获取振动压路机每遍压实时的压实状态值csv、有效压实深度he、线压力p、振动压实能量w、压实遍数n和压实速度v; 5、其中,压实状态值csv计算公式如下: 6、csv=|eam-eag| 7、eam为振动马达加速度有效值,eag为钢轮加速度有效值; 8、s2,建立自适应提升图神经网络,将每遍压实时的压实状态值csv、线压力p、振动压实能量w、压实遍数n和压实速度v作为输入量,压实度c作为输出量,对有效压实深度he采用初始赋值方法得到最初训练值,训练自适应提升图神经网络,对整个作业过程压实度c进行预测。 9、优选的,振动马达加速度从振动压路机的振动马达位置处获取,钢轮加速度从振动压路机的钢轮内侧幅板位置处获取。 10、优选的,拟合压实后期的各层压实度随深度变化曲线,定义压实度96%时的压实深度为有效压实深度he。 11、优选的,使用环刀法测量振动压实过程中不同深度处不同压实遍数下的压实度,作为he初始训练赋值,得到最初训练值。 12、优选的,当压实状态值csv在[0,1]范围内,评价压路机的作业状态为出色;当压实状态值csv在(1,2]范围内,评价压路机的作业状态为合理;当压实状态值csv在(2,3]范围内,评价压路机的作业状态为基本合理;当压实状态值csv在(3,+∞]范围内,评价压路机的作业状态为不适应。 13、优选的,当有效压实深度he在[30,+∞)范围内,评价压路机的压实能力为优秀;当有效压实深度he在[25,30)范围内,评价压路机的压实能力为良好;当有效压实深度he在[20,25)范围内,评价压路机的压实能力为一般;当有效压实深度he在(0,20)范围内,评价压路机的压实能力为可接受。 14、优选的,自适应提升图神经网络包含由图卷积层,正则化层构成的隐藏层和adaboost.r2策略聚合隐藏层节点表征。 15、一种振动压路机作业性能智能检测方法,包括: 16、数据获取模块,用于获取振动压路机每遍压实时的压实状态值csv、有效压实深度he、线压力p、振动压实能量w、压实遍数n和压实速度v; 17、其中,压实状态值csv计算公式如下: 18、csv=|eam-eag| 19、eam为振动马达加速度有效值,eag为钢轮加速度有效值; 20、作业性能检测模块,用于建立自适应提升图神经网络,将每遍压实时的压实状态值csv、线压力p、振动压实能量w、压实遍数n和压实速度v作为输入量,压实度c作为输出量,对有效压实深度he采用初始赋值方法得到最初训练值,训练自适应提升图神经网络,对整个作业过程压实度c进行预测。 21、一种计算机设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现所述振动压路机作业性能智能检测方法的步骤。 22、一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现所述振动压路机作业性能智能检测方法的步骤。 23、与现有技术相比,本发明具有以下有益效果: 24、本发明将压实状态值csv和有效压实深度he作为作业性能指标之一,压实状态值csv由振动马达加速度和钢轮加速度计算得到,解决了因测点位置单一而导致的加速度值可靠性低的问题,同时放大了非线性响应影响效果,计算压实状态值csv,其代表了振动参数选取与介质匹配的相关性;将压实状态值csv、线压力p、振动压实能量w、压实遍数n和压实速度v作为输入量,使用有效压实深度he初始赋值方法给出最初训练值,带入到自适应提升图神经网络中进行训练,预测压实度,实现了振动压路机作业性能的检测,提高了振动压路机作业性能智能检测的准确性。 技术特征: 1.一种振动压路机作业性能智能检测方法,其特征在于,包括以下步骤: 2.根据权利要求1所述的振动压路机作业性能智能检测方法,其特征在于,振动马达加速度从振动压路机的振动马达位置处获取,钢轮加速度从振动压路机的钢轮内侧幅板位置处获取。 3.根据权利要求1所述的振动压路机作业性能智能检测方法,其特征在于,拟合压实后期的各层压实度随深度变化曲线,定义压实度96%时的压实深度为有效压实深度he。 4.根据权利要求1所述的振动压路机作业性能智能检测方法,其特征在于,使用环刀法测量振动压实过程中不同深度处不同压实遍数下的压实度,作为he初始训练赋值,得到最初训练值。 5.根据权利要求1所述的振动压路机作业性能智能检测方法,其特征在于,当压实状态值csv在[0,1]范围内,评价压路机的作业状态为出色;当压实状态值csv在(1,2]范围内,评价压路机的作业状态为合理;当压实状态值csv在(2,3]范围内,评价压路机的作业状态为基本合理;当压实状态值csv在(3,+∞]范围内,评价压路机的作业状态为不适应。 6.根据权利要求1所述的振动压路机作业性能智能检测方法,其特征在于,当有效压实深度he在[30,+∞)范围内,评价压路机的压实能力为优秀;当有效压实深度he在[25,30)范围内,评价压路机的压实能力为良好;当有效压实深度he在[20,25)范围内,评价压路机的压实能力为一般;当有效压实深度he在(0,20)范围内,评价压路机的压实能力为可接受。 7.根据权利要求1所述的振动压路机作业性能智能检测方法,其特征在于,自适应提升图神经网络包含由图卷积层,正则化层构成的隐藏层和adaboost.r2策略聚合隐藏层节点表征。 8.一种振动压路机作业性能智能检测方法,其特征在于,包括: 9.一种计算机设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现如权利要求1至7任意一项所述振动压路机作业性能智能检测方法的步骤。 10.一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至7任意一项所述振动压路机作业性能智能检测方法的步骤。 技术总结本发明公开了一种振动压路机作业性能智能检测方法、系统及设备介质,S1,获取振动压路机每遍压实时的压实状态值CSV、有效压实深度h |
【本文地址】
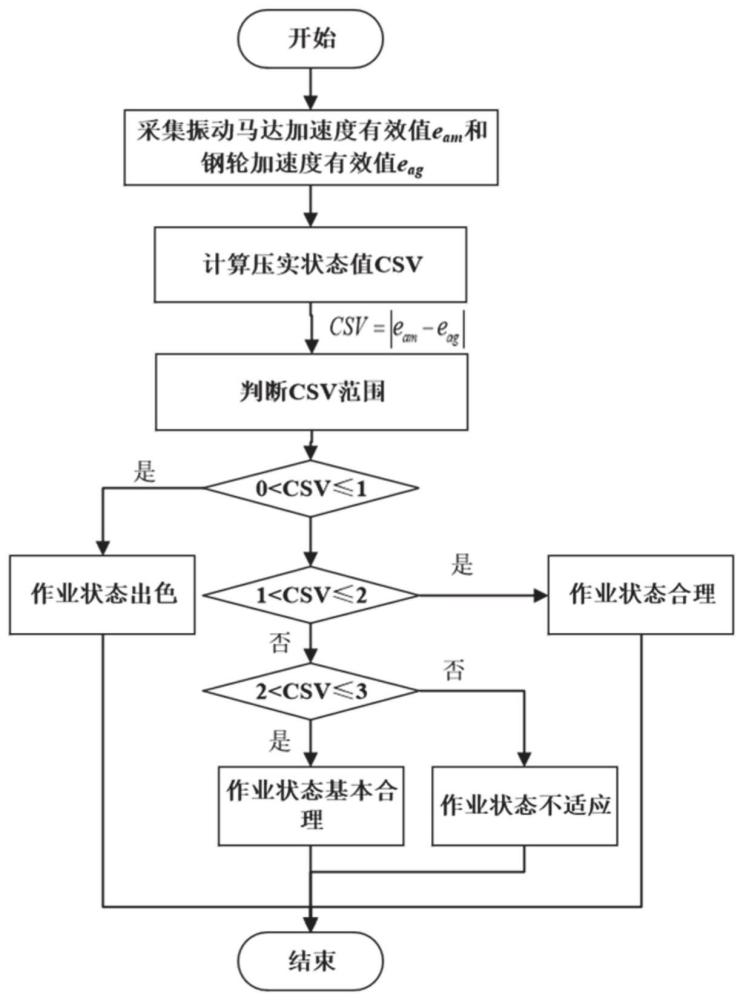
今日新闻 |
推荐新闻 |