实验四 单片机串口通信实验 |
您所在的位置:网站首页 › 单片机实验结果 › 实验四 单片机串口通信实验 |
实验四 单片机串口通信实验
|
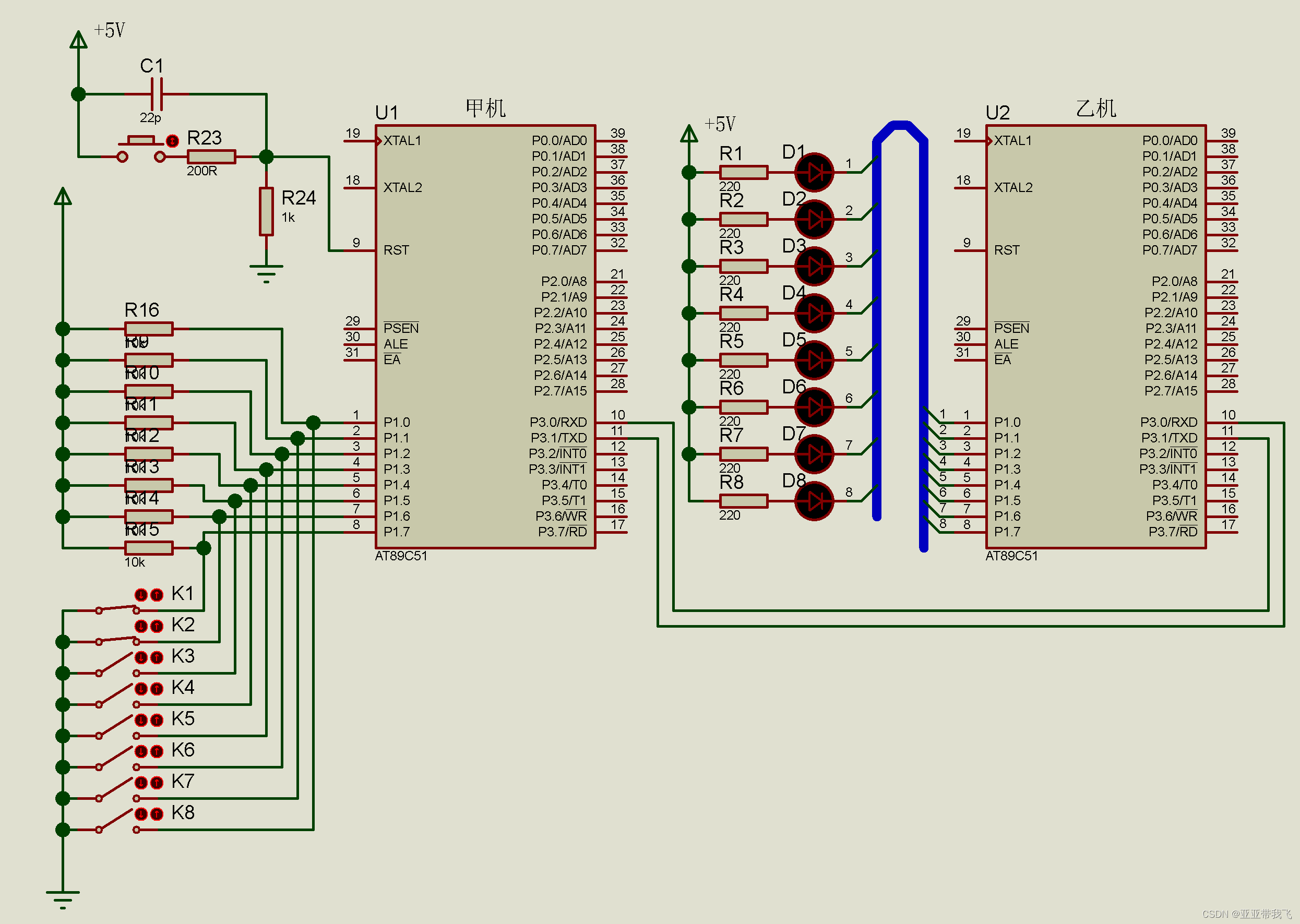
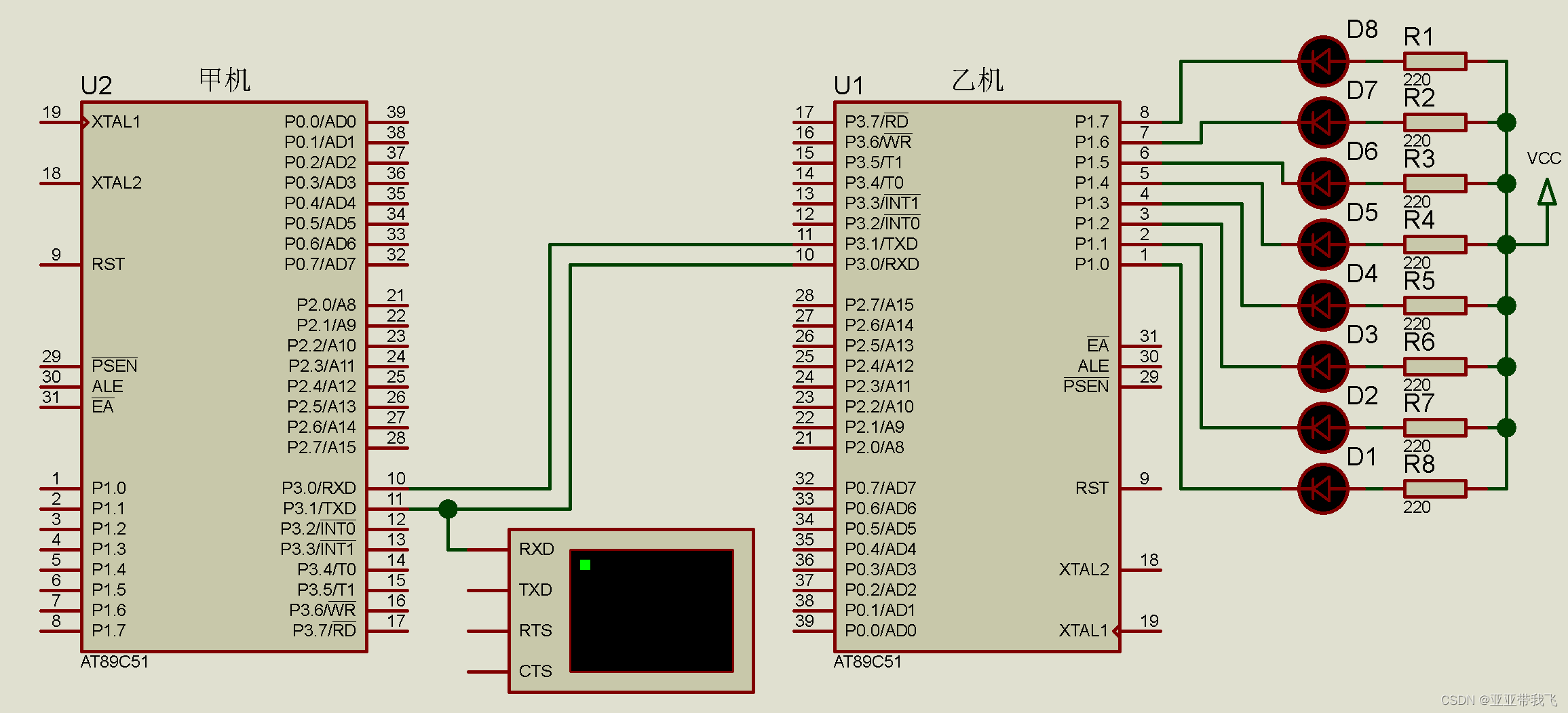
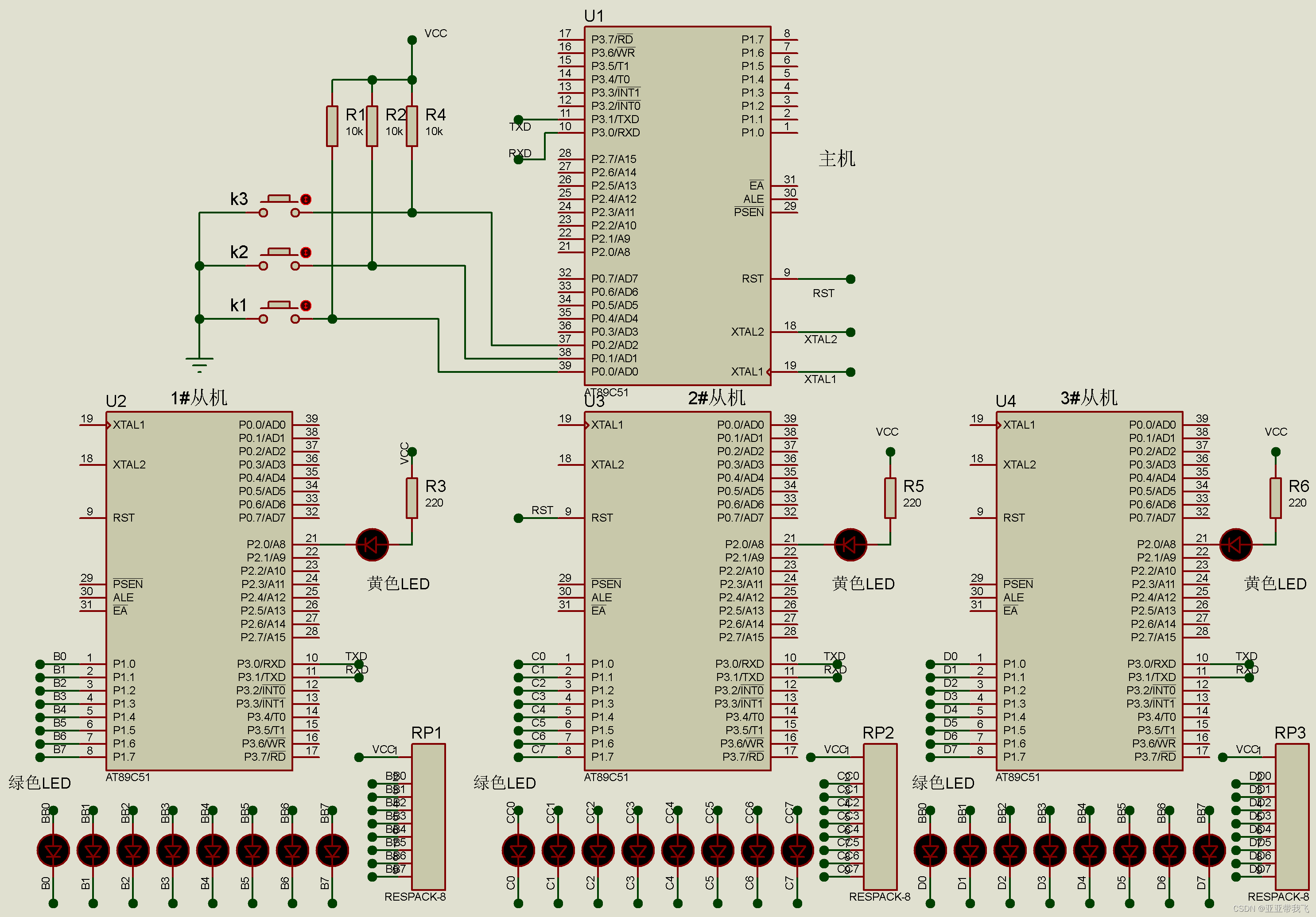
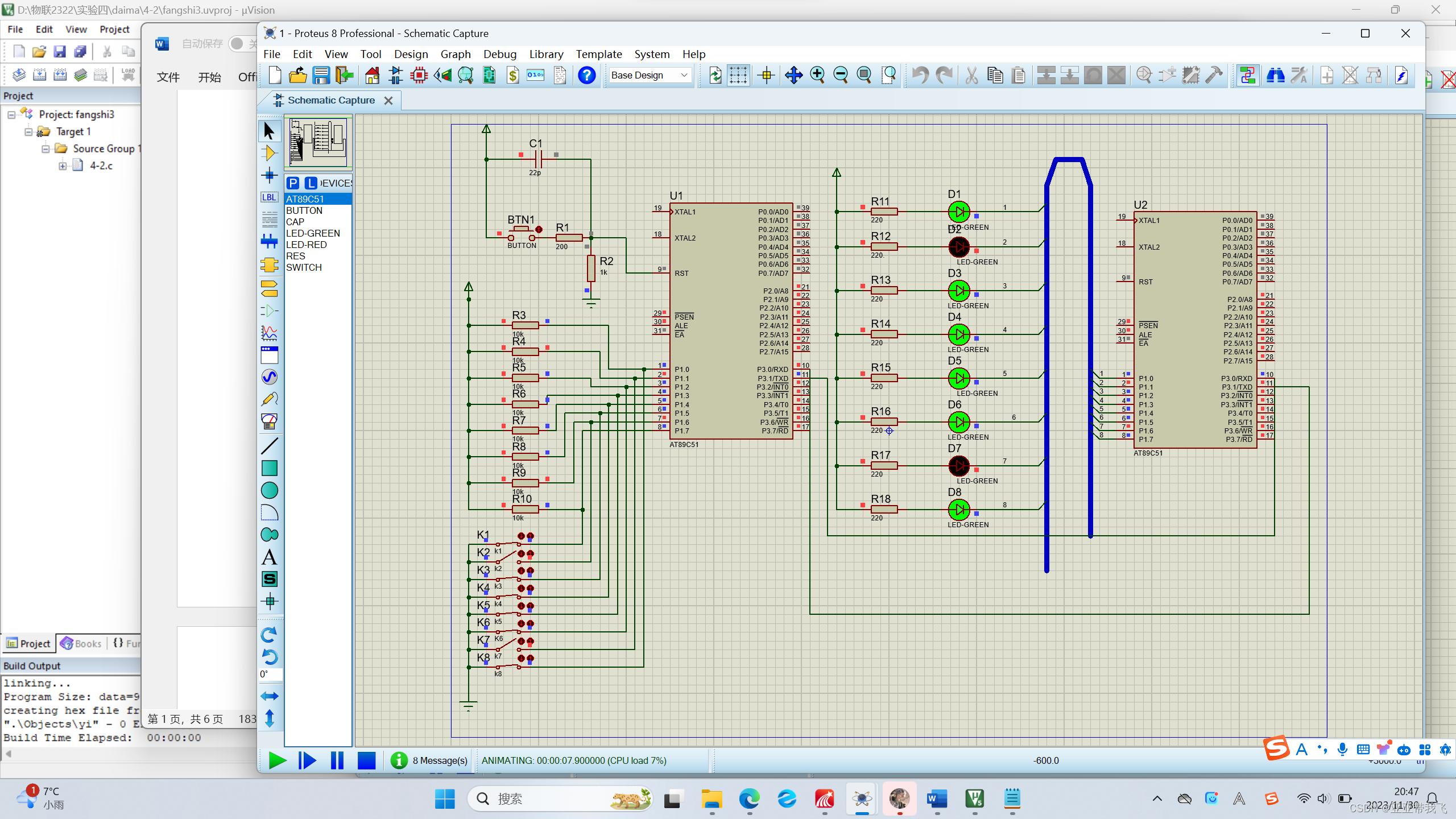
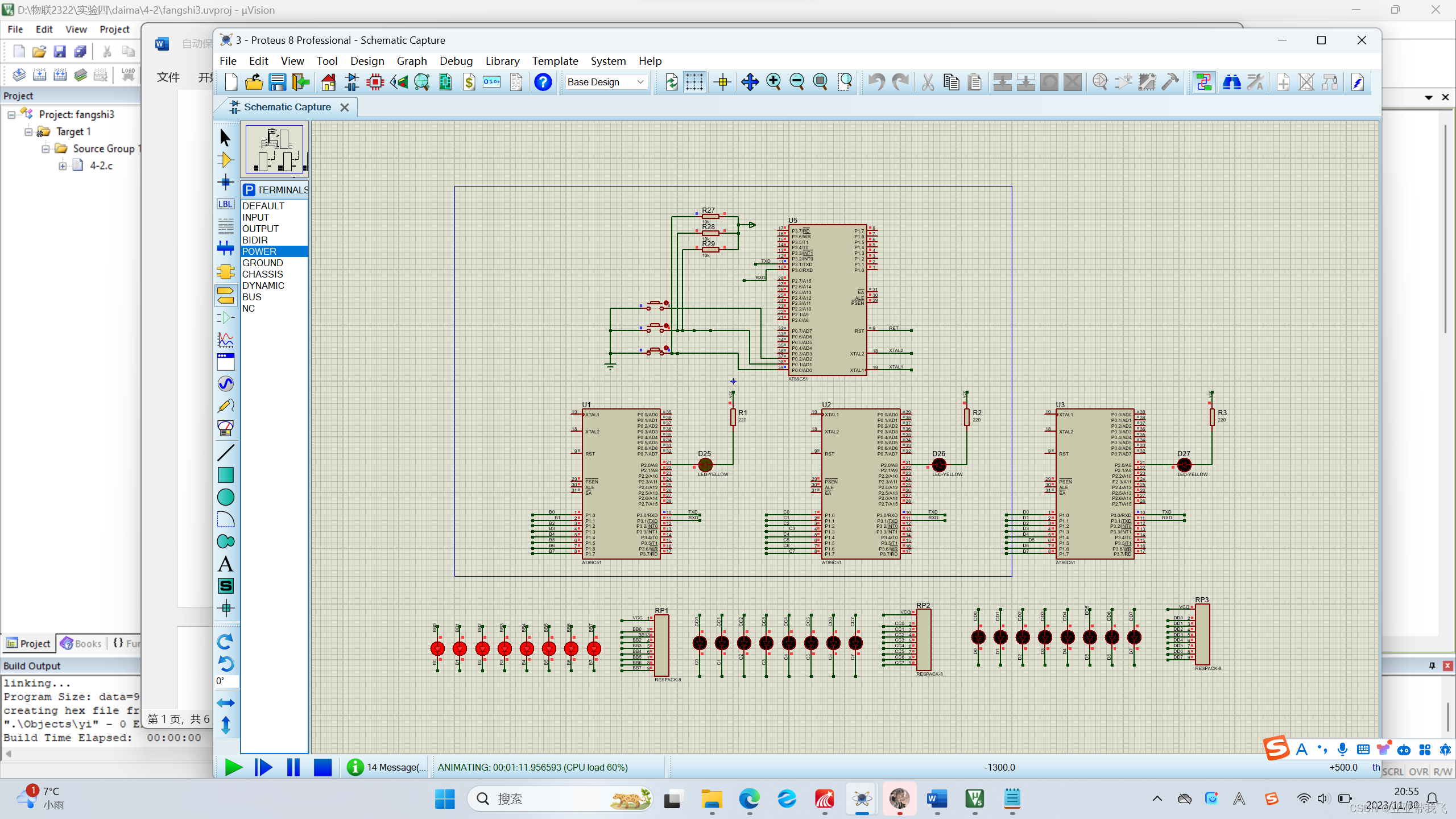
《单片机原理与应用》课程 课程实验报告 实验四 单片机串口通信实验 实验目的1.学习单片机串行口的使用方法; 2.熟悉基于串行口的双机通信方案的设计与实现方法; 3.熟悉基于串行口的多机通信方案的设计与实现方法。 实验内容与步骤 基于串口的方式1,以仿真方式实现单片机的双机通信实验 实验目标: 单片机甲、乙双机串行通信,双机RXD和TXD相互交叉相连,甲机P1口接8个开关,乙机P1口接8个发光二极管;双方晶振均采用11.0592MHz。甲机设置为只能发送不能接收的单工方式。要求甲机读入P1口的8个开关的状态后,通过串行口发送到乙机,乙机将接收到的甲机的8个开关的状态数据送入P1口,由P1口的8个发光二极管来显示8个开关的状态。双方晶振均采用11.0592MHz。2.主要实验内容: 1) 画双机连接仿真图。 2) 编程实现1端8个开关对另一端8个灯的一对一控制。 基于串口方式3的双机通信实验1.实验目标: 甲、乙两单片机进行方式3串行通信。甲机把控制8个流水灯点亮的数据发送给乙机并点亮其P1口的8个LED。要进行校验:乙机接收到的8位二进制数据有可能出错,需进行奇偶校验,其方法是将乙机的RB8和PSW的奇偶校验位P进行比较,如果相同,接收数据;否则拒绝接收。3)观察:虚拟终端来观察甲机串口发出的数据。 2.主要实验内容: 1)画双机连接仿真图。 2)编程实现1端程序输出数据实现对另一端8个灯的循环亮灯控制。 (三)基于仿真的方式实现单片机的多机通信实验(扩展,选) 1)画双机连接仿真图。 2)编程实现其基于按键的选择控制功能。 三、实验步骤: (一)基于方式1的双机通信实验 1.画仿真原理图,连接参考图如下。
画图过程的注意事项: 在进行总线画法的连线时,要注意支线与总线的连接不要是垂直连接,可采用45度连接,连接总线的支线都要加标号,并要将有连接关系的支线加上相同的标号。 通信双方不同单片机连接不同外部电路的支线,其标号不能相同。串口连接关系一定要是交叉连接,即收连发、发连收。调试过程注意事项: 1)甲方、乙方的程序不同,要分别生成其各自的HEX文件,可放在相同目录中。 2)生成方法有二:一种是在同一工程中分别加入程序,生成各自的HEX文件,这时需要在选项的output对话框中改文件名。第二种是建立两个不同的工程,分别生成甲方、乙方的HEX文件。 (现场验收点1:基于Proteus仿真及工作方式1实现双机通信。) (二)基于串口方式3的双机通信实验 1.画仿真原理图,连接参考图如下。
2. 编程、调试实现功能。 四、扩展实验:多机通信
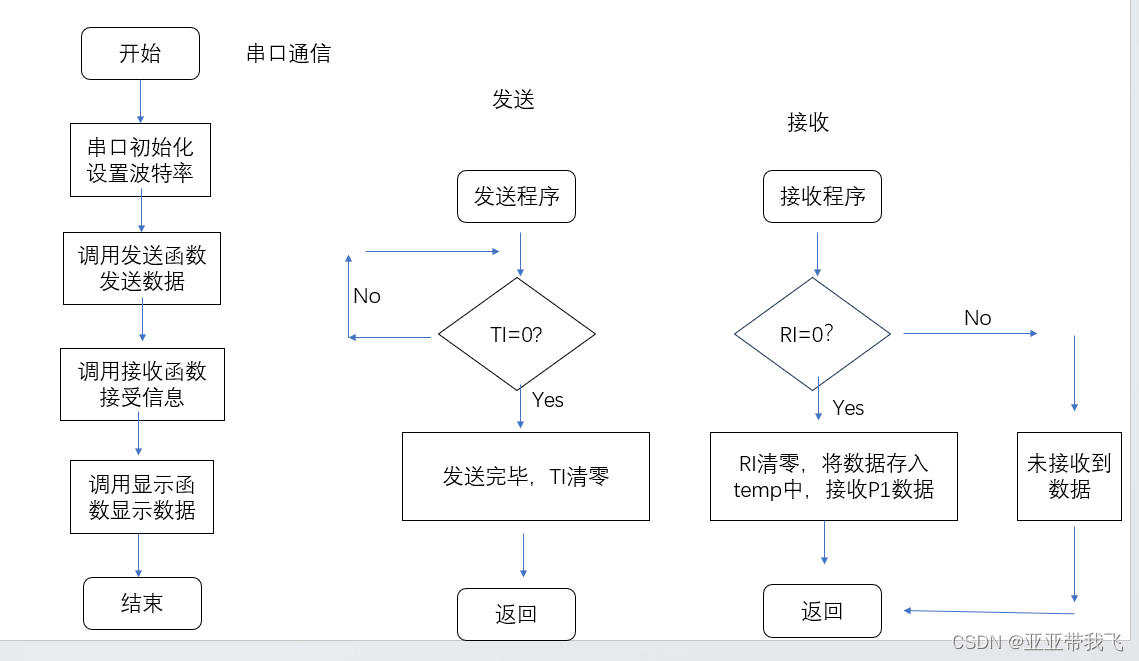
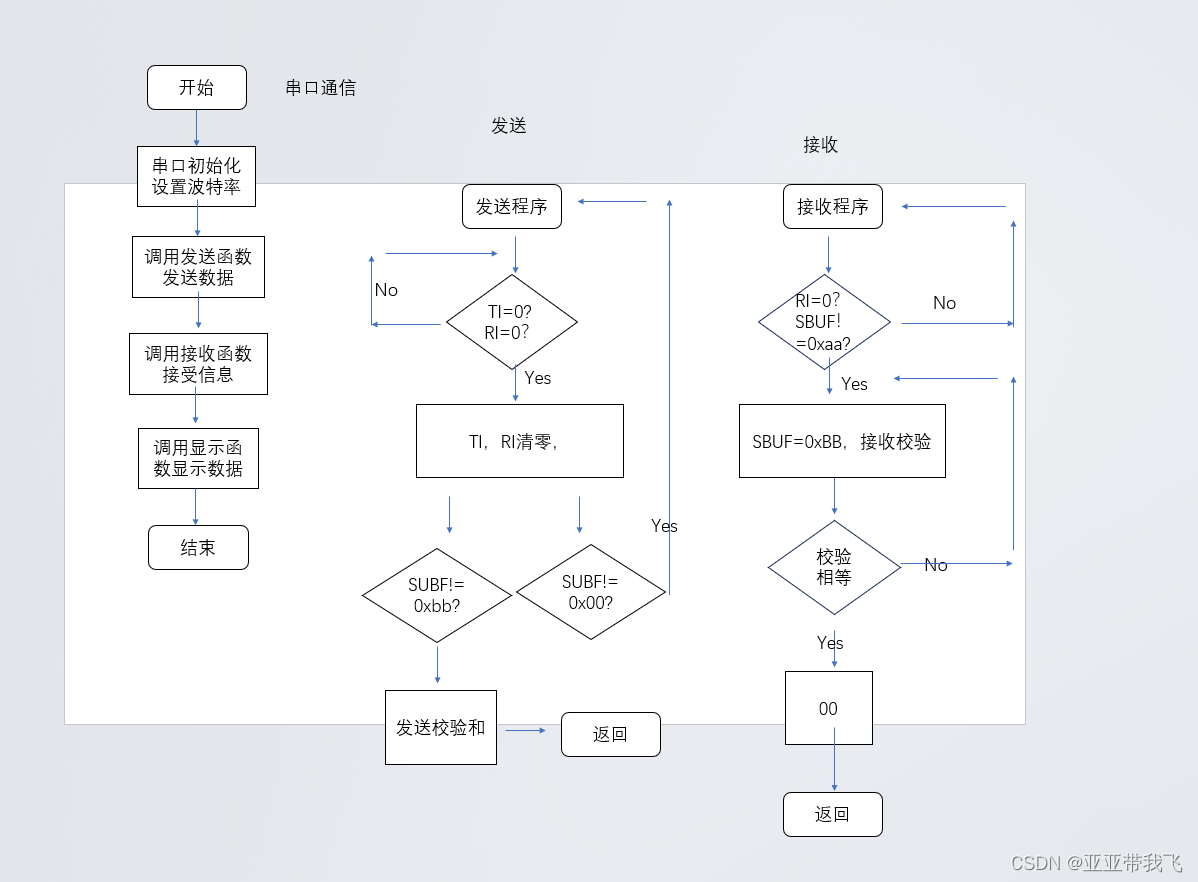
三、 实验环境 PC机一台、keil 4/5、 proteus 7/8。 实验系统的总体设计(1)双机串口通信(单工通信)
(2)双机串口通信(双工校验通信)
实验系统的详细设计与实验过程 1. 仿真部分: (1)基于串口的方式1,以仿真方式实现单片机的双机通信实验
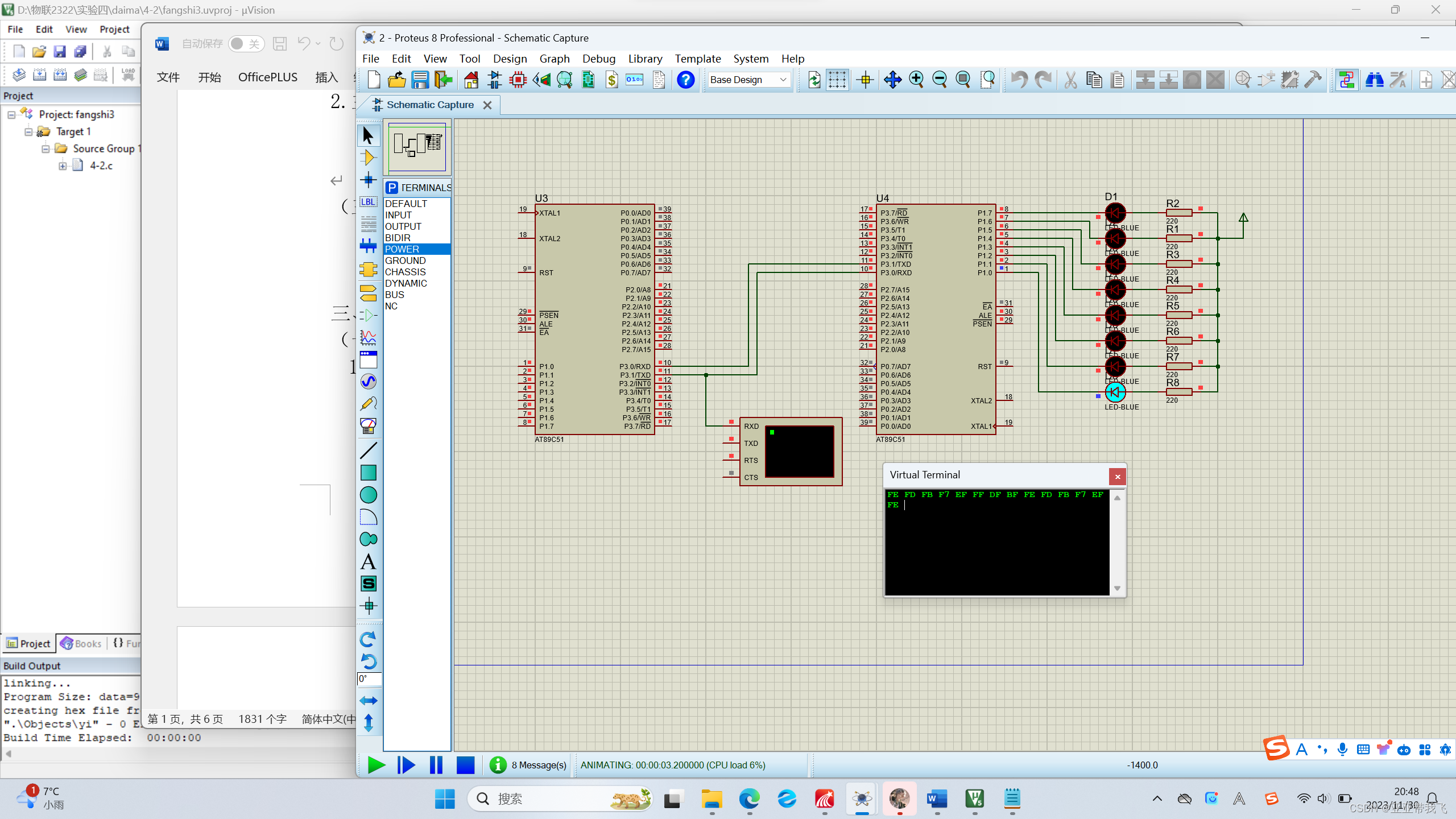
(2)基于串口方式3的双机通信实验
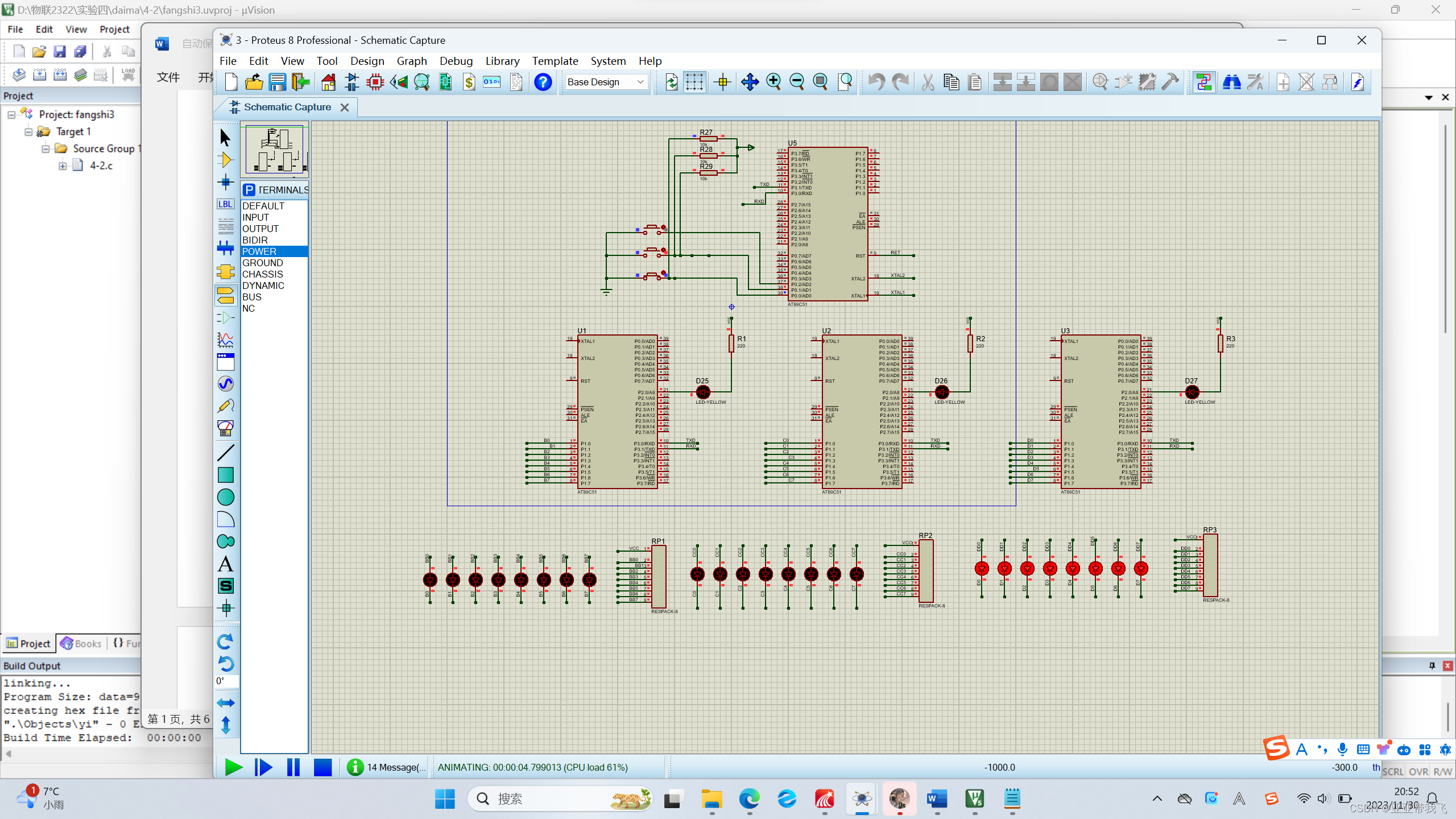
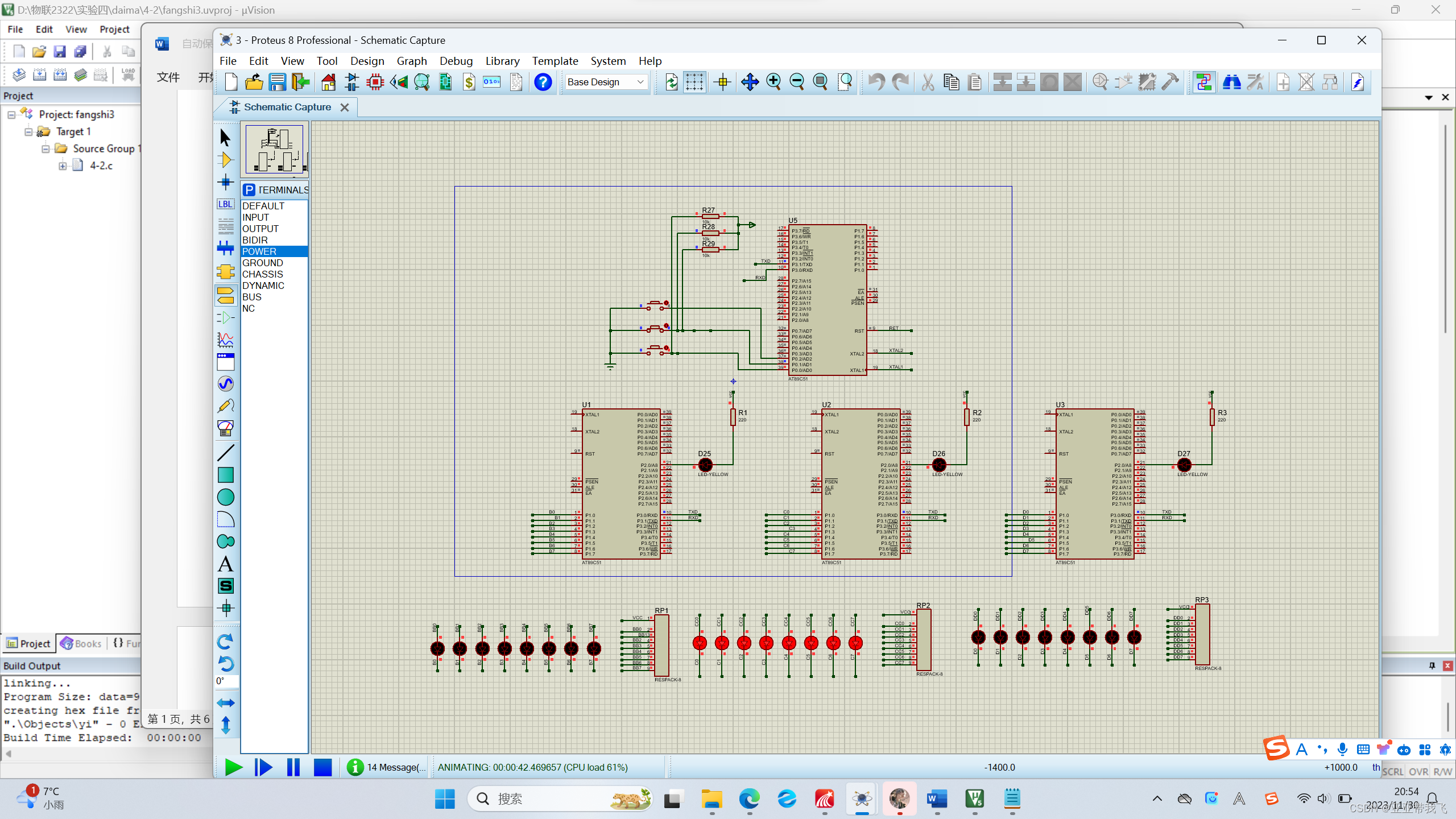
(3)基于仿真的方式实现单片机的多机通信实验
(1) /*主机 #include #define uchar unsigned char #define uint unsigned int void main() { uchar temp=0 ; TMOD=0x20; TH1=0xfd; TL1=0xfd; SCON=0x40; PCON=0x00 ; TR1=1; P1=0xff; while(1){ temp=P1; SBUF=temp; while(TI==0); TI=0; } } */ 乙机 #include #define uchar unsigned char #define uint unsigned int void main( ) { uchar temp=0; TMOD=0x20; TH1=0xfd; TL1=0xfd; SCON=0x50; PCON=0x00; TR1=1 ; while(1) { while (RI==0); RI=0; temp=SBUF; P1=temp; } } (2) /甲机 //#include //unsigned char Tab[8]= {0xfe, 0xfd, 0xfb, 0xf7, 0xef, 0xdf, 0xbf, 0x7f}; //void Send(unsigned char dat) //{ // TB8=PSW^0; // SBUF=dat; // while(TI==0); // ; // TI=0; //} //void Delay (void) //{ unsigned char m,n; // for(m=0;m unsigned char j; for(;i>0;i--); for(j=0;j delay_ms(100); if(switch1==0) { TB8=1; SBUF=0x01; while(TI==0); TI=0; TB8=0; SBUF=0x00; while(TI==0); TI=0; } if(switch2==0) { TB8=1; SBUF=0x02; while(TI==0); TI=0; TB8=0; SBUF=0x00; while(TI==0); TI=0; } if(switch3==0) { TB8=1; SBUF=0x03; while(TI==0); TI=0; TB8=0; SBUF=0x00; while(TI==0); TI=0; } } } */ /*机1 #include #include sbit led=P2^0; bit rrdy=0; bit trdy=0; bit err=0; void delay_ms(unsigned int i) { unsigned char j; for(;i>0;i--); for(j=0;j if(RI) { if(RB8) { RB8=0; if(SBUF==0x01) { SM2=0; led=0; } } else { rrdy=1; P1=SBUF; SM2=1; led=1; } RI=0; } delay_ms(50); P1=0xff; } */ /*机2 #include #include sbit led=P2^0; bit rrdy=0; bit trdy=0; bit err=0; void delay_ms(unsigned int i) { unsigned char j; for(;i>0;i--); for(j=0;j if(RI) { if(RB8) { RB8=0; if(SBUF==0x02) { SM2=0; led=0; } } else { rrdy=1; P1=SBUF; SM2=1; led=1; } RI=0; } delay_ms(50); P1=0xff; } */ //机3 #include #include sbit led=P2^0; bit rrdy=0; bit trdy=0; bit err=0; void delay_ms(unsigned int i) { unsigned char j; for(;i>0;i--); for(j=0;j if(RI) { if(RB8) { RB8=0; if(SBUF==0x03) { SM2=0; led=0; } } else { rrdy=1; P1=SBUF; SM2=1; led=1; } RI=0; } delay_ms(50); P1=0xff; } 实验结果(1)1端8个开关对另一端8个灯的一对一控制。 (2)1端程序输出数据实现对另一端8个灯的循环亮灯控制,并在虚拟端出现发送数据。 (3)K1控制机1亮灯;K2控制机2亮灯;K3控制机3亮灯;3个开关控制的亮灯效果不同 实验分析与总结 实验1中刚开始开关只能控制开始的串口数据,然后停止不动,重写代码,重新生成HEX文件得以解决。实验2中,Led灯不亮,数据闪烁,经过检查发现是电源的原因,其中检验函数是成功的关键。实验3中,刚开始K1控制分机,HEX文件导入错误,经过改正,K2控制不了机2,经过检查,线路接口引脚标错,改正后重新导入HEX文件,可以成功控制。总结:实验中,代码正确,步骤正确,可能也会出现错误,只有不断地检查,完善,改正才是实验的最终目的。 如有不完善,评论指出。 |
【本文地址】
今日新闻 |
推荐新闻 |