经典力学学习(运动学) |
您所在的位置:网站首页 › 动态壁纸超清的好还是高清的好 › 经典力学学习(运动学) |
经典力学学习(运动学)
|
圆周运动的
运
动
方
程
\blue{运动方程}
运动方程和
轨
迹
方
程
\blue{轨迹方程}
轨迹方程
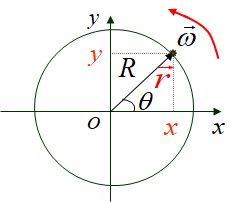
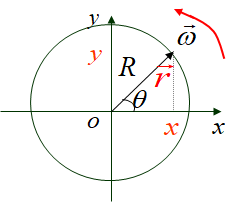
x = R c o s ( w t ) , y = R s i n ( w t ) , z = 0 x=Rcos(wt),y=Rsin(wt),z=0 x=Rcos(wt),y=Rsin(wt),z=0 1、圆周运动方程的 矢 量 式 \red{矢量式} 矢量式r ⃗ = R ( c o s ( w t ) i ⃗ + s i n ( w t ) j ⃗ ) \vec{r}=R(cos(wt)\vec{i}+sin(wt)\vec{j}) r =R(cos(wt)i +sin(wt)j ) 轨迹方程x 2 + y 2 = R 2 , z = 0 x^2+y^2=R^2,z=0 x2+y2=R2,z=0 自然坐标中的速度和加速度 速度
线速度与角速度: Δ s = R Δ θ = > v = R ω \Delta s=R\Delta \theta=>v=R\omega Δs=RΔθ=>v=Rω 切向加速度与角加速度: a τ = R α ( 由 上 式 对 t 求 导 所 得 ) a_{\tau}=R\alpha(由上式对t求导所得) aτ=Rα(由上式对t求导所得) 法向加速度与角速度: a n = v 2 R = v ω = R ω 2 a_n=\frac{v^2}{R}=v\omega=R{\omega}^2 an=Rv2=vω=Rω2 速度分量式: v x = d x d t = d ( R c o s ω t ) d t = − R ω s i n ω t v_x=\frac{dx}{dt}=\frac{d(Rcos\omega t)}{dt}=-R\omega sin\omega t vx=dtdx=dtd(Rcosωt)=−Rωsinωt v y = d y d t = d ( R s i n ω t ) d t = R ω c o s ω t v_y=\frac{dy}{dt}=\frac{d(Rsin\omega t)}{dt}=R\omega cos\omega t vy=dtdy=dtd(Rsinωt)=Rωcosωt v = v x 2 + v y 2 = R ω v=\sqrt{v^2_x+v^2_y}=R\omega v=vx2+vy2 =Rω 速度矢量式: v ⃗ = d r ⃗ d t = v x i ⃗ + v y j ⃗ = R ω ( − s i n ω t i ⃗ + c o s ω t j ⃗ ) \vec{v}=\frac{d\vec{r}}{dt}=v_x\vec{i}+v_y\vec{j}=R\omega(-sin\omega t\vec{i}+cos\omega t\vec{j}) v =dtdr =vxi +vyj =Rω(−sinωti +cosωtj ) 加速度分量式: a x = d v x d t = − R ω 2 c o s ω t a_x=\frac{dv_x}{dt}=-R\omega^2cos\omega t ax=dtdvx=−Rω2cosωt a y = d v y d t = − R ω 2 s i n ω t a_y=\frac{dv_y}{dt}=-R\omega^2sin\omega t ay=dtdvy=−Rω2sinωt a = ∣ a ⃗ ∣ = a x 2 + a y 2 = R ω 2 a=|\vec{a}|=\sqrt{a^2_x+a^2_y}=R\omega^2 a=∣a ∣=ax2+ay2 =Rω2 匀变速率圆周运动α = 常 量 , 故 : a t = r α , a n = r ω 2 \alpha=常量,故:a_t=r\alpha,a_n=r\omega^2 α=常量,故:at=rα,an=rω2 ω = ω 0 + α t \omega=\omega_0+\alpha t ω=ω0+αt θ = θ 0 + ω 0 t + 1 2 α t 2 \theta=\theta_0+\omega_0t+\frac{1}{2}\alpha t^2 θ=θ0+ω0t+21αt2 ω 2 = ω 0 2 + 2 α ( θ − θ 0 ) \omega^2=\omega_0^2+2\alpha(\theta-\theta_0) ω2=ω02+2α(θ−θ0) 一般平面曲线运动对于这种曲线运动,曲率半径是变化的,通常是
ρ
\rho
ρ来表示。 |
 线速度:
v
⃗
=
lim
Δ
t
→
0
Δ
r
⃗
Δ
t
=
lim
(
Δ
r
⃗
Δ
s
Δ
s
Δ
t
)
=
(
lim
Δ
r
⃗
Δ
s
)
(
lim
Δ
s
Δ
t
)
\vec{v}=\lim_{\Delta t\to 0} \frac{\Delta \vec{r}}{\Delta t}=\lim(\frac{\Delta \vec{r}}{\Delta s}\frac{\Delta s}{\Delta t})=(\lim\frac{\Delta \vec{r}}{\Delta s})(\lim\frac{\Delta s}{\Delta t})
v
=Δt→0limΔtΔr
=lim(ΔsΔr
ΔtΔs)=(limΔsΔr
)(limΔtΔs)
(
lim
Δ
t
→
0
Δ
r
⃗
Δ
s
)
=
d
r
⃗
d
s
=
τ
⃗
(\lim_{\Delta t\to 0}\frac{\Delta\vec{r}}{\Delta s})=\frac{d\vec{r}}{ds}=\vec{\tau}
(Δt→0limΔsΔr
)=dsdr
=τ
v
=
lim
Δ
t
→
0
Δ
s
Δ
t
=
d
s
d
t
v=\lim_{\Delta t\to 0}\frac{\Delta s}{\Delta t}=\frac{ds}{dt}
v=Δt→0limΔtΔs=dtds
v
⃗
=
v
τ
⃗
=
d
s
d
t
τ
⃗
\vec{v}=v\vec{\tau}=\frac{ds}{dt}\vec{\tau}
v
=vτ
=dtdsτ
线速度:
v
⃗
=
lim
Δ
t
→
0
Δ
r
⃗
Δ
t
=
lim
(
Δ
r
⃗
Δ
s
Δ
s
Δ
t
)
=
(
lim
Δ
r
⃗
Δ
s
)
(
lim
Δ
s
Δ
t
)
\vec{v}=\lim_{\Delta t\to 0} \frac{\Delta \vec{r}}{\Delta t}=\lim(\frac{\Delta \vec{r}}{\Delta s}\frac{\Delta s}{\Delta t})=(\lim\frac{\Delta \vec{r}}{\Delta s})(\lim\frac{\Delta s}{\Delta t})
v
=Δt→0limΔtΔr
=lim(ΔsΔr
ΔtΔs)=(limΔsΔr
)(limΔtΔs)
(
lim
Δ
t
→
0
Δ
r
⃗
Δ
s
)
=
d
r
⃗
d
s
=
τ
⃗
(\lim_{\Delta t\to 0}\frac{\Delta\vec{r}}{\Delta s})=\frac{d\vec{r}}{ds}=\vec{\tau}
(Δt→0limΔsΔr
)=dsdr
=τ
v
=
lim
Δ
t
→
0
Δ
s
Δ
t
=
d
s
d
t
v=\lim_{\Delta t\to 0}\frac{\Delta s}{\Delta t}=\frac{ds}{dt}
v=Δt→0limΔtΔs=dtds
v
⃗
=
v
τ
⃗
=
d
s
d
t
τ
⃗
\vec{v}=v\vec{\tau}=\frac{ds}{dt}\vec{\tau}
v
=vτ
=dtdsτ
 加速度:
a
⃗
=
d
v
⃗
d
t
=
d
(
v
τ
⃗
)
d
t
=
d
v
d
t
τ
⃗
+
v
d
τ
⃗
d
t
\vec{a}=\frac{d\vec{v}}{dt}=\frac{d(v\vec{\tau})}{dt}=\frac{dv}{dt}\vec{\tau}+v\frac{d\vec{\tau}}{dt}
a
=dtdv
=dtd(vτ
)=dtdvτ
+vdtdτ
其中:
d
τ
⃗
=
∣
τ
∣
d
θ
n
⃗
=
d
θ
n
⃗
d\vec{\tau}=|\tau|d\theta\vec{n}=d\theta\vec{n}
dτ
=∣τ∣dθn
=dθn
d
τ
⃗
d
t
=
d
θ
d
t
n
⃗
=
R
d
θ
R
d
t
n
⃗
=
1
R
d
s
d
t
n
⃗
=
v
R
n
⃗
\frac{d\vec{\tau}}{dt}=\frac{d\theta}{dt}\vec{n}=\frac{Rd\theta}{Rdt}\vec{n}=\frac{1}{R}\frac{ds}{dt}\vec{n}=\frac{v}{R}\vec{n}
dtdτ
=dtdθn
=RdtRdθn
=R1dtdsn
=Rvn
⇒
a
⃗
=
d
v
d
t
τ
⃗
+
v
2
R
n
⃗
=
a
τ
τ
⃗
+
a
n
n
⃗
\Rightarrow\vec{a}=\frac{dv}{dt}\vec{\tau}+\frac{v^2}{R}\vec{n}=a_{\tau}\vec{\tau}+a_n\vec{n}
⇒a
=dtdvτ
+Rv2n
=aττ
+ann
切向加速度:
a
τ
=
d
v
d
t
a_{\tau}=\frac{dv}{dt}
aτ=dtdv 法向加速度:
a
n
=
v
2
R
a_n=\frac{v^2}{R}
an=Rv2 加速度大小:
a
=
∣
a
⃗
∣
=
a
τ
2
+
a
n
2
a=|\vec{a}|=\sqrt{a_{\tau}^2+a_n^2}
a=∣a
∣=aτ2+an2
加速度:
a
⃗
=
d
v
⃗
d
t
=
d
(
v
τ
⃗
)
d
t
=
d
v
d
t
τ
⃗
+
v
d
τ
⃗
d
t
\vec{a}=\frac{d\vec{v}}{dt}=\frac{d(v\vec{\tau})}{dt}=\frac{dv}{dt}\vec{\tau}+v\frac{d\vec{\tau}}{dt}
a
=dtdv
=dtd(vτ
)=dtdvτ
+vdtdτ
其中:
d
τ
⃗
=
∣
τ
∣
d
θ
n
⃗
=
d
θ
n
⃗
d\vec{\tau}=|\tau|d\theta\vec{n}=d\theta\vec{n}
dτ
=∣τ∣dθn
=dθn
d
τ
⃗
d
t
=
d
θ
d
t
n
⃗
=
R
d
θ
R
d
t
n
⃗
=
1
R
d
s
d
t
n
⃗
=
v
R
n
⃗
\frac{d\vec{\tau}}{dt}=\frac{d\theta}{dt}\vec{n}=\frac{Rd\theta}{Rdt}\vec{n}=\frac{1}{R}\frac{ds}{dt}\vec{n}=\frac{v}{R}\vec{n}
dtdτ
=dtdθn
=RdtRdθn
=R1dtdsn
=Rvn
⇒
a
⃗
=
d
v
d
t
τ
⃗
+
v
2
R
n
⃗
=
a
τ
τ
⃗
+
a
n
n
⃗
\Rightarrow\vec{a}=\frac{dv}{dt}\vec{\tau}+\frac{v^2}{R}\vec{n}=a_{\tau}\vec{\tau}+a_n\vec{n}
⇒a
=dtdvτ
+Rv2n
=aττ
+ann
切向加速度:
a
τ
=
d
v
d
t
a_{\tau}=\frac{dv}{dt}
aτ=dtdv 法向加速度:
a
n
=
v
2
R
a_n=\frac{v^2}{R}
an=Rv2 加速度大小:
a
=
∣
a
⃗
∣
=
a
τ
2
+
a
n
2
a=|\vec{a}|=\sqrt{a_{\tau}^2+a_n^2}
a=∣a
∣=aτ2+an2
 角速度:
ω
=
lim
Δ
t
→
0
Δ
θ
Δ
t
=
d
θ
d
t
\omega=\lim_{\Delta t\to 0}\frac{\Delta \theta}{\Delta t}=\frac{d\theta}{dt}
ω=Δt→0limΔtΔθ=dtdθ 角加速度:
α
=
lim
Δ
t
→
0
Δ
ω
Δ
t
=
d
ω
d
t
=
d
2
θ
d
t
2
\alpha=\lim_{\Delta t\to 0}\frac{\Delta \omega}{\Delta t}=\frac{d\omega}{dt}=\frac{d^2\theta}{dt^2}
α=Δt→0limΔtΔω=dtdω=dt2d2θ
角
速
度
ω
⃗
方
向
:
\red{角速度\vec{\omega}方向:}
角速度ω
方向:按照“右手规则”确定,四个手指指向运动方向,大拇指方向便是角速度方向。
角
加
速
度
α
⃗
方
向
:
\red{角加速度\vec{\alpha}方向:}
角加速度α
方向:加速时与
ω
⃗
\vec{\omega}
ω
方向相同,减速时与
ω
⃗
\vec{\omega}
ω
方向相反。
角速度:
ω
=
lim
Δ
t
→
0
Δ
θ
Δ
t
=
d
θ
d
t
\omega=\lim_{\Delta t\to 0}\frac{\Delta \theta}{\Delta t}=\frac{d\theta}{dt}
ω=Δt→0limΔtΔθ=dtdθ 角加速度:
α
=
lim
Δ
t
→
0
Δ
ω
Δ
t
=
d
ω
d
t
=
d
2
θ
d
t
2
\alpha=\lim_{\Delta t\to 0}\frac{\Delta \omega}{\Delta t}=\frac{d\omega}{dt}=\frac{d^2\theta}{dt^2}
α=Δt→0limΔtΔω=dtdω=dt2d2θ
角
速
度
ω
⃗
方
向
:
\red{角速度\vec{\omega}方向:}
角速度ω
方向:按照“右手规则”确定,四个手指指向运动方向,大拇指方向便是角速度方向。
角
加
速
度
α
⃗
方
向
:
\red{角加速度\vec{\alpha}方向:}
角加速度α
方向:加速时与
ω
⃗
\vec{\omega}
ω
方向相同,减速时与
ω
⃗
\vec{\omega}
ω
方向相反。 a
⃗
=
a
⃗
τ
+
a
⃗
n
=
a
τ
τ
⃗
+
a
n
n
⃗
=
d
v
d
t
τ
⃗
+
v
2
ρ
n
⃗
\vec{a}=\vec{a}_{\tau}+\vec{a}_n=a_{\tau}\vec{\tau}+a_n\vec{n}=\frac{dv}{dt}\vec{\tau}+\frac{v^2}{\rho}\vec{n}
a
=a
τ+a
n=aττ
+ann
=dtdvτ
+ρv2n
a
=
∣
a
⃗
∣
=
a
τ
2
+
a
n
2
a=|\vec{a}|=\sqrt{a^2_{\tau}+a^2_n}
a=∣a
∣=aτ2+an2
对于匀速圆周运动:
v
=
C
,
a
τ
=
d
v
d
t
=
0
,
a
=
a
n
=
v
2
R
v=C,a_{\tau}=\frac{dv}{dt}=0,a=a_n=\frac{v^2}{R}
v=C,aτ=dtdv=0,a=an=Rv2
a
⃗
=
a
⃗
τ
+
a
⃗
n
=
a
τ
τ
⃗
+
a
n
n
⃗
=
d
v
d
t
τ
⃗
+
v
2
ρ
n
⃗
\vec{a}=\vec{a}_{\tau}+\vec{a}_n=a_{\tau}\vec{\tau}+a_n\vec{n}=\frac{dv}{dt}\vec{\tau}+\frac{v^2}{\rho}\vec{n}
a
=a
τ+a
n=aττ
+ann
=dtdvτ
+ρv2n
a
=
∣
a
⃗
∣
=
a
τ
2
+
a
n
2
a=|\vec{a}|=\sqrt{a^2_{\tau}+a^2_n}
a=∣a
∣=aτ2+an2
对于匀速圆周运动:
v
=
C
,
a
τ
=
d
v
d
t
=
0
,
a
=
a
n
=
v
2
R
v=C,a_{\tau}=\frac{dv}{dt}=0,a=a_n=\frac{v^2}{R}
v=C,aτ=dtdv=0,a=an=Rv2【本文地址】
今日新闻 |
推荐新闻 |