PreScan传感器(二) |
您所在的位置:网站首页 › 前车雷达与360的区别 › PreScan传感器(二) |
PreScan传感器(二)
|
TIS传感器可直接输出检测到目标物。 转载请注明出处:PreScan传感器(二)——TIS传感器_gloria_iris的博客-CSDN博客_tis传感器 目录 1. 简介 2.TIS传感器的配置 (1) Basic Tab (2) System Tab (3) ORM Assignment Tab (4) Draft Tab & Noise Tab (5) AdvanceTab 3. TIS传感器在Simulink中的表示 4. TIS传感器与AIR传感器的区别 1. 简介TIS(Technology independent sensor)传感器是一种通用的active scanning sensor,而不受特定技术(如radar, lidar or laser scanner)束缚。TIS传感器可帮助使用和理解其他active scanning传感器,是因为TIS传感器有较强的场景离散化,任何active scanning设备离散化有两种方式: 空间上,由于照射目标的光束数量有限,导致灰色区域”无法检测目标(除非发生多径反射,这是TIS无法处理的); 时间上,由于照明和检测目标的持续时间有效。
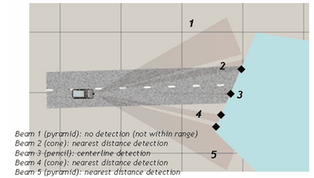
(a) range,azimuth and elevation的定义 (b)ORM显示角度的定义 图2 输出参数的具体解释 2.TIS传感器的配置 (1) Basic Tab光束配置:数量和方位角; 图3 Basic设置页面 1) 扫描模式:主要有line scan, 'Z'scan和Matrix scan具体内容见PreScan传感器(零)——通用配置 2) 扫描参数: Field of VIew(FoV) in Azimuth and Elevation:从最终左光束的外边缘到右光束的外边缘的角度(不是从中心计算的),azimuth的可输入范围0~360度,elevation的范围值是0~180度。Number of Beams in Azimuth and Elevation:FoV中光束的个数,所有光束的中心线将根据FoV和光束数等距间隔。Horizontal/vertical scan:用户可定义的扫描方向。Capture frequency FoV:执行速率。每个光束的最终扫描频率信息:根据所选的扫描模式,方位角和仰角中的光束数以及所需的捕获频率来计算。 3) 光束特定设置: 光束范围:所有光束的有效范围,可在“Advanced tab”中设置光束方向指定范围。可输入的范围从最小检测范围(默认0.5m,可在Experiment->General Settings->Sensors更改)到1000m.光束类型:a) pyramid beam,基于最邻近距离来检测; b) cone beam,基于最邻近距离来检测; c) elliptical cone,基于嘴里案件距离来检测; d) pencil beam,基于被照亮的单个点。 如图4,当障碍物(蓝色)放在TIS传感器面前时,它会给各个光束的读数留下印象,黑色菱形表示每个选定光束类型检索道的范围和角度信息的点。默认情况下,选择pencil beam. 图4 beam类型图示 光束注意:最大目标检测数目为灰色,不允许修改,此处不能修改是因为beam type为‘pencil’。 (3) ORM Assignment TabORM(对象响应模型),将目标与TIS配置联系起来。如图5所示,最上层一行是实验中所用车辆,最左侧一列是所用TIS传感器。第一辆车Toyata Yaris有两个不同的ORM模型,一个是TIS1得到的,一个是TIS2检测到的。第二辆车Mazda RX8有三个不同的ORM模型;第三辆车没有TIS可检测到,可被指定为默认的ORM模型;老房子有一个TIS4 ORM,但是不存在TIS4,因此任何TIS传感器都无法检测到。 关于将ORM分配到车辆:每个目标(或车辆)都有一个对话框,通过“传感器属性”选项可进行分配,默认情况下,对象的默认ORM始终存在,可将其替换为所需要的模型。 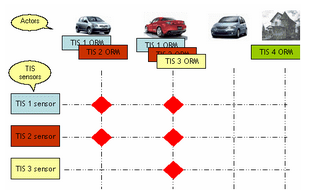 图5 ORM的思想
(4) Draft Tab & Noise Tab
图5 ORM的思想
(4) Draft Tab & Noise Tab
Drift:是由于安装松动、振动或环境温度等因素,传感器的位置发生了变化。所有beam发生了偏移,导致方位角和仰角读数的偏移。目标的局部入射角(及ORM值)会产生影响。 Noise:检测器接收到目标信号流的波动和外部因素的增加而造成的,噪声源是可以随即提供的。在测量每个beam的方位角、仰角或距离时,会以任何随机或周期性的非数据信号形式出现。
在Drift tab中,可选择零均值高斯和单向漂移类型,不必输入高斯draft的均值,因为它与每个光束的位置一致;在Noise tab中,可输入类似的信号。 两者的区别在于: Noise tab可以定义哪个噪声量分配给start of the illumination path('x%'),另一部分分配给start of the reflection path('100-x%')。 start of the illumination path的噪声是beam中的几何噪声,会影响beam的方向;end of the illumination path的噪声是测量噪声,应用于测量数据。 相同的drift可用于所有beams(相关);noise应用在不同beams且不相关。 此外,噪声叠加的方式可进行选择,相加或相乘。 相加value=nominal value + n相乘value=nominal value *(1+n)其中,噪声项n是标准差为s的零均值高斯分布值。 (5) AdvanceTab会覆盖掉Basic Tab中的配置,需要选中“beam wise”复选框,来自定义添加或删除光束。
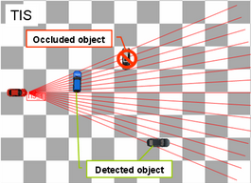
根据用户选择,TIS传感器每个光束的输出目标上限是100个。 signal nameDescriptionNotesignal nameDescriptionNoteBeam ID(-)当前仿真时间步长beam的ID号 0表示无检测 DropplerVelocity TranslationX/Y/Z(m/s)速度的平移分量,分解到X,Y,Z方向上1,3Range(m)检测到的目标距离(障碍物-自车)DropplerVelocity Rotation X/Y/Z(m/s)速度的旋转分量,分解到X,Y,Z方向上1,3DopplerVelocity(m/s)相对于传感器,目标点沿传感器与目标点光线的速度(障碍物-自车)1DropplerVelocity X/Y/Z(m/s)DopplerVelocity分解到XYZ方向上1,3Theta(deg)detected target在传感器坐标系中的Azimuth角(障碍物-自车)Alpha(deg)传感器在target object上的方位入射角2Phi(deg)detected target在传感器坐标系中的Elevation角Beta(deg)传感器在target object上的elevation入射角2TargetID(-)detected target的ID号TargetTypeID(-)detected object的类型ID3EnergyLoss(dB)接收功率/发射功率的比2TIS Data(-)Bus信号包含所有输出Note 1:传感器是“Coherent System”才可用 Note 2:传感器有“ORM Ports”使能才可用 Note 3:仅作为TIS数据信号的一部分使用 4. TIS传感器与AIR传感器的区别(1) AIR检测bounding box的信息; (2) TIS考虑目标遮挡。 图2 TIS传感器检测目标物 |






【本文地址】
今日新闻 |
推荐新闻 |