一. 卡尔曼滤波器开发实践之一: 五大公式详解 |
您所在的位置:网站首页 › 公式1+1=1的合理解释 › 一. 卡尔曼滤波器开发实践之一: 五大公式详解 |
一. 卡尔曼滤波器开发实践之一: 五大公式详解
|
既然标题名称是开发实践,本系列文章将主要介绍如何在工程实践中使用卡尔曼滤波器,至于卡尔曼滤波器的五大公式如何推导而来,网上有很多大拿们写的都很精彩,这里不再叙述.可以参考了下面两篇博文: 1. 卡尔曼滤波器推导与解析 - 案例与图片 2. 扩展卡尔曼滤波新手教程 3. 代码参考: The Extended Kalman Filter: An Interactive Tutorial for Non-Experts 的作者放在github上的TinyEKF 这个系列计划分七小节介绍:一.卡尔曼滤波器开发实践之一: 五大公式 也就是本文 二.卡尔曼滤波器开发实践之二: 一个简单的位置估计卡尔曼滤波器 三.卡尔曼滤波器(EKF)开发实践之三: 基于三个传感器的海拔高度数据融合 四.卡尔曼滤波器(EKF)开发实践之四: ROS系统位姿估计包robot_pose_ekf详解 五.卡尔曼滤波器(EKF)开发实践之五: 编写自己的EKF替换robot_pose_ekf中EKF滤波器 六.卡尔曼滤波器(UKF)开发实践之六: 无损卡尔曼滤波器(UKF)进阶-白话讲解篇 七.卡尔曼滤波器(UKF)开发实践之七: 无损卡尔曼滤波器(UKF)进阶-实例篇 -------------------------------------------正文开始--------------------------- 一. 卡尔曼滤波器的两大步骤和五大公式 预测步骤: 1.
向量的维数n就是系统状态值个数(n>=1). 确定好并记住的这个维数n,后面公式很多矩阵会用到. 举例说明, 你要用卡尔曼滤波器估计一个圆点跟随鼠标在屏幕上的移动位置,这个 记住,如果要设置系统初始状态,我们设置的是 2. 这是一个根据你的系统状态变换方程得到的状态转移矩阵,也叫预测矩阵. 之所以叫状态转移矩阵,是因为它反应的是: 当测量值未介入计算时,前后两个时刻的状态值变化情况. 之所以又叫预测矩阵, 可以理解为在预测公式中根据上一时刻系统状态 那么,系统状态变换方程又是什么?怎么求? 预测矩阵 那么 (1) 假如用卡尔曼滤波器估计一个圆点跟随鼠标在屏幕上的位置Point(x,y),系统状态值是一个2维向量(x y). 如果当前鼠标位置Point(x,y)作为测量值还未参与计算时(公式才参与), 前后时刻系统状态向量(x y)保持不变,即
此时: (2) 假如一个把3路传感器读数融合为一个最优读数的系统,系统状态值是一个1维向量(x), 在新的3路传感器读数参与到公式之前,前后时刻系统状态变换方程也是恒等关系,不会变化.
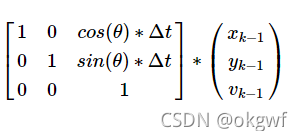
(3) 再一个复杂点的例子. 你的系统要评估一个直线匀速运动的小车在平面地图上的位置Position(x,y), 匀速速度为v=2 pixel/s.也就是系统状态为3维列向量(x y v )或写作[x y v]. 直线运动方向固定为θ=30°. 我们看看这个系统状态变换方程: 根据初中物理运动学公式: St = S0 + v * t 有: x轴方向新位置x: x_k = x_k-1 + 0 + cos(θ) * v_k-1 * Δt y轴方向新位置y: y_k = 0 + y_k-1 + sin(θ) * v_k-1 * Δt 直线运动速度v: v_k = 0 + 0 + v_k-1 Δt为每次预测和更新调用时间周期T. 用矩阵表示就是
Note: 这里要注意一点时. 我们固定了小车运动方向θ=30°, cos(θ)和sin(θ)计算结果是固定值. 所以小车的系统状态变化符合线性计算,符合高斯分布计算. 假如小车运动方向θ非固定随时可变化. 小车可以左右随意转向, 小车的系统状态变化呈非线性,不再符合高斯分布, 那么 另外,这里讲的线性和非线性,不是表面上小车是否沿直线运动, 而是因为cos(θ)和sin(θ)两个三角函数,当θ变化时,其图形是曲线,变化率不固定. 3. 大多数卡尔曼滤波系统中 [nxn] * (nx1) = (nx1) 或 [nx1] * u = (nx1) 我们继续以上面例子(3)来介绍. 在上面列子基础上, 我们加入加速速(踩提速油门))和减速(刹车)控制, 也就是物理运动学中的加速度a, a > 0 是加速,a < 0时减速, a = 0时匀速或静止. 那具体怎么放入 同样需要做运动学方程分析, 根据初中物理运动公式: v_t = v_0 + a * Δt S_t = S_0 + v_0* Δt + 1/2 * a * 于是上面例子(3)的状态方程改为: x轴方向新位置x: x_k = x_k-1 + 0 + cos(θ) * v_k-1 * Δt + 1/2 * cos(θ) * a * y轴方向新位置y: y_k = 0 + y_k-1 + sin(θ) * v_k-1 * Δt + 1/2 * sin(θ) * a * 直线运动速度v: v_k = 0 + 0 + v_k-1 + a * Δt 这三个式子中,前4部分保持不变,最后1项,从列方向单列出就是:
至此,完整的公式
有了公式的预测公式实现, 公式的实现就简单了. 至于公式的理论依据,不是本文重点,请参考五大公式理论推导. 本文只关注开发实践. 我们先回忆下协方差的概念和用途: 在概率论和统计学中协方差用于衡量两个变量(x和y)的总体误差。协方差表示的是两个变量的总体的误差,如果两个变量的变化趋势一致,也就是说如果其中一个大于自身的期望值,另外一个也大于自身的期望值,那么两个变量之间的协方差就是正值。 如果两个变量的变化趋势相反,即其中一个大于自身的期望值,另外一个却小于自身的期望值,那么两个变量之间的协方差就是负值。 从数值上来看,协方差数值越大,两个变量同向的程度越大,反之亦然. 而方差是协方差的一种特殊情况,即当两个变量是同一变量(x和x)。我们知道方差它反映的是数据序列与均值的关系。 所以,对于nxn的协方差矩阵 好了. 现在我们来设置 同样用上面例子(3)小车直线运动的例子,系统初始状态值一般通过小车的传感器都能轻松获取到,而且误差不会太大,较可信. 我们可以
同上面一样,
所以,开发实践中, 这个公式除了 以上面例子(3)小车直线运动的例子,测量值和状态值一样,都是3维列向量(
针对上面例子(1): m=2, 例子(2):m=3, 例子(3): m=3 其名称各个版本说法不一. 我的理解是: Note: 当这个映射关系为恒等关系时, 当这个映射关系为线性变换关系时, 但当这个映射关系为非线性关系时, 在Note一下: 如果 说了一大堆究竟 的计算结果要从
下面介绍下 对于明显的线性转换关系,
, 对于非恒等关系的线性关系,如:z=ax+b,比如: n=3,m=3时,假如所有状态量均为同一线性关系:
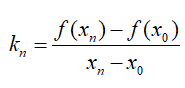
对于非线性关系,需要做线性化处理. 这就用到高中导数和导函数知识.复习一下
这里插播一下. 我们回想前面二. 公式中讲解 如果对于一个非线性关系,你不会或无法求出其导函数或偏导函数. 可以直接按照导数的物理意义或几何意义所描述那样, 直接使用其有限差分或连续差分代替. 公式就是上面引用的导数的几何意义,曲线的任一点切线斜率公式:
用这个公式,设置
终于到最后一个公式: 其实它还可以进一步提取公因式后,精简为: 这个在编写程序时可以使用. 这个公式,没有其他可说的, 按照公式编写代码即可. 七. 总结:本来想介绍下卡尔曼滤波器五大公式在开发实践中的用法,没想到竟然写这么多. 开始有点担心会不会有人认真看完了.
|
 或
或
 进一步:
进一步: 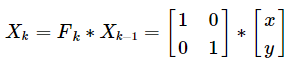 (暂不考虑
(暂不考虑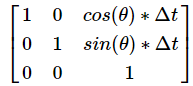 进一步:
进一步: 



 可见这里
可见这里



【本文地址】
今日新闻 |
推荐新闻 |