负反馈系统中运放的相位裕度仿真、环路增益的stb仿真 |
您所在的位置:网站首页 › 全差分运算放大器设计怎么调参数 › 负反馈系统中运放的相位裕度仿真、环路增益的stb仿真 |
负反馈系统中运放的相位裕度仿真、环路增益的stb仿真
|
这里没目录标题
一、引言二、巴克豪森判据、最坏情况下的相位裕度、相位裕度三、相位裕度与开环,环路,闭环增益的关系四、环路增益、闭环增益和相位的仿真4.1 运放为双入单出时4.1.1 系统的闭环增益4.1.2 stb仿真系统的环路增益和相位裕度(环路稳定性)
4.2 运放为全差分时4.2.1 系统的闭环增益4.2.2 stb仿真系统的环路增益和相位裕度(环路稳定性)
五、总结
ref:
1.强推闭环增益、环路增益和PM关系说明 https://zhuanlan.zhihu.com/p/462528974
2.https://zhuanlan.zhihu.com/p/551710844>
3.何乐年 P130-负反馈闭环系统中的运算放大器环路增益的仿真测量
4.stb仿真环路增益 https://blog.csdn.net/jay183986697/article/details/104539035
一、引言
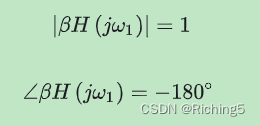
在设计运放时,相位裕度是一个重要的参数,因为运放通常工作在闭环中,相位裕度对闭环的稳定性和时域响应都有影响。而开环的运放就相当于一个性能一般的比较器。那如何对运放的相位裕度进行考虑、测量就很重要。 二、巴克豪森判据、最坏情况下的相位裕度、相位裕度对于一个如下图的负反馈系统,其系统闭环传递函数(闭环增益)为: 若有w1使得βH(s=jw1)=-1则环路增益无穷大会产生振荡。此条件可以表达为下式,这就是巴克豪森判据:
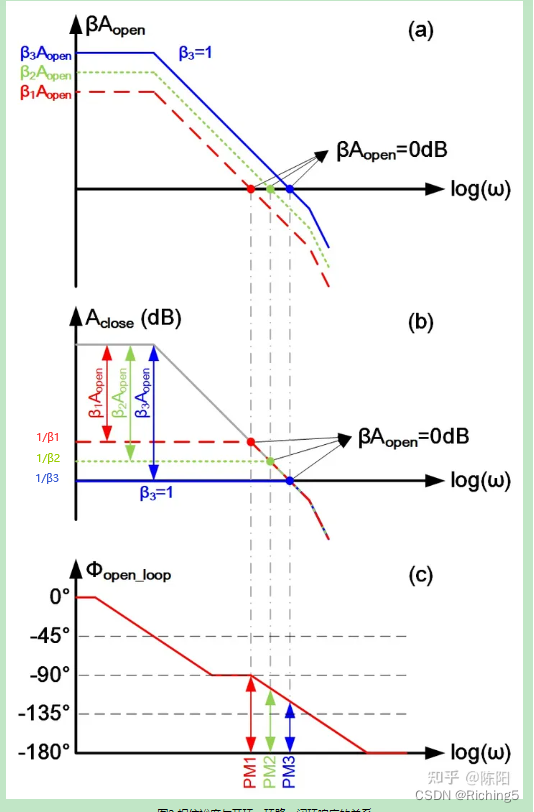
根据巴克豪森判据可以看出,判断反馈系统是否稳定主要取决于环路响应βH(s)。但在设计运放中我们通常是将运放开环响应的GBW频率处的剩余相位当作相位裕度,因为β=1时闭环增益βH(s)变等价于开环增益H(s)。这实际是种适用所有反馈系数β下的最差相位裕度。这样设计对可能使用在各种情况下的通用运放来说没问题的,但对于芯片内部一些β为确定值的情况,便会存在过设计,造成一些性能浪费。 PM有两种计算方式,在part.三中会进行说明,但在具体仿真中我们发现用闭环测PM是更为合理的,这样测不会忽略由于反馈网络和寄生电容(例如mos输入电容)形成的意料之外的极点。 注意巴克豪森判据可以看出,PM是找环路增益为1时,环路增益的相位曲线离-180°的距离,而非闭环响应的,避免混淆概念。 三、相位裕度与开环,环路,闭环增益的关系图中展示了次极点在GBW外的单极点系统的环路增益、闭环增益和相位的关系,注意由于β是实数,所以环路增益的相位本质上和开环增益的相位是同一条曲线,但闭环增益和开环增益的相位曲线并不一样。 从红到蓝β逐渐增大。注意该曲线绘制在对数坐标系下。从图中可以知道: 1.(a)中可以看出随着β增加,环路增益幅度整体上移,环路增益的GBW增加。 2.(b)中灰色线为开环增益,通过闭环增益公式,可以知道开环增益和闭环增益的差值(dB)大概是环路增益,因此环路增益=0dB时即βAopen=1,则环路增益=0dB的频率点为Aopen与Aclose重新交合的点(也是闭环主极点位置),前提是单极点系统。闭环后系统由于极点频率从w0变为(1+βAopen)w0,所以带宽增加,但闭环增益GBW并没有变化。 3.计算PM可以找βAopen=0dB或Aopen与Aclose的交点对应频率点下的开环增益的相位曲线。 4.(c)由于是单极点系统,随着β增加,环路增益幅度整体上移,GX点后移,高频极点开始起作用,所以对应PM下降。 5.由于β3=1,所以图(a)中β3Aopen的曲线就是运放的开环增益曲线。我们在设计运放时,常常通过检查GBW处剩余的相位作为运放的相位裕度,实际上得到的就是该运放在β3=1这个相位裕度最坏情况下的值。单位增益负反馈下的相位裕度等于开环仿真的相位裕度。 6.测PM的方法:找闭环增益和开环增益交点频率下的开环相位曲线来计算;找环路增益=0dB的频率下的环路增益相位曲线来曲线。在part.4.2中会说明后者是更优的测量方法,因为前者会忽略寄生电容和反馈网络形成的极点。
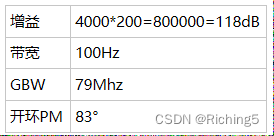
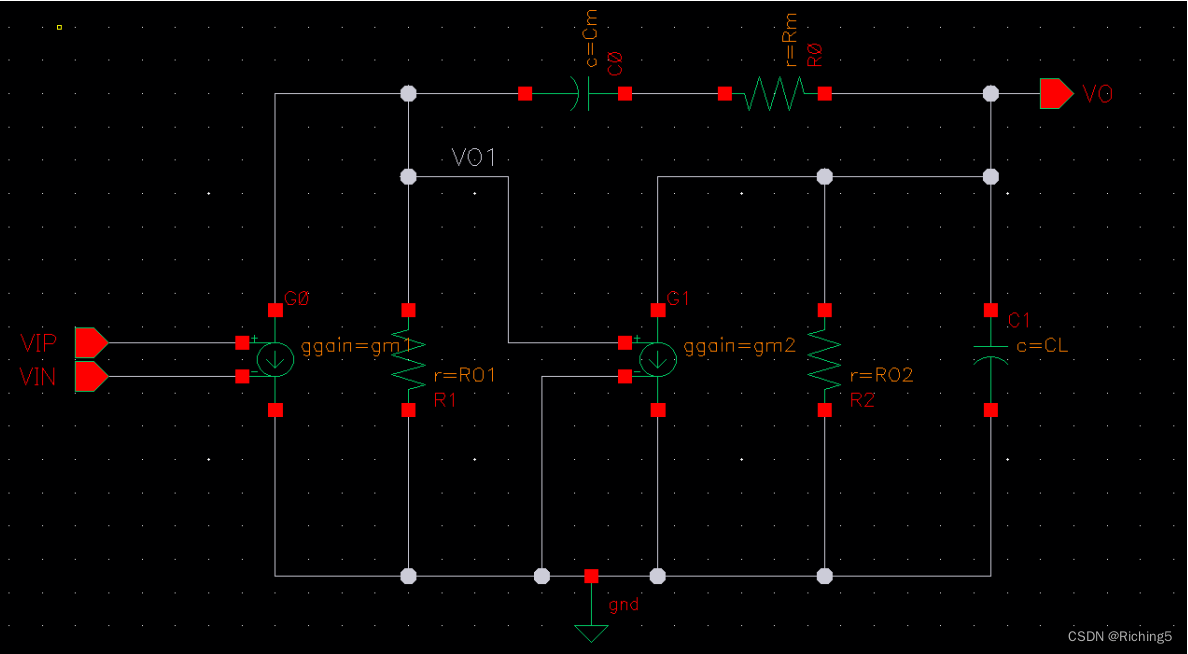
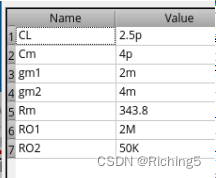
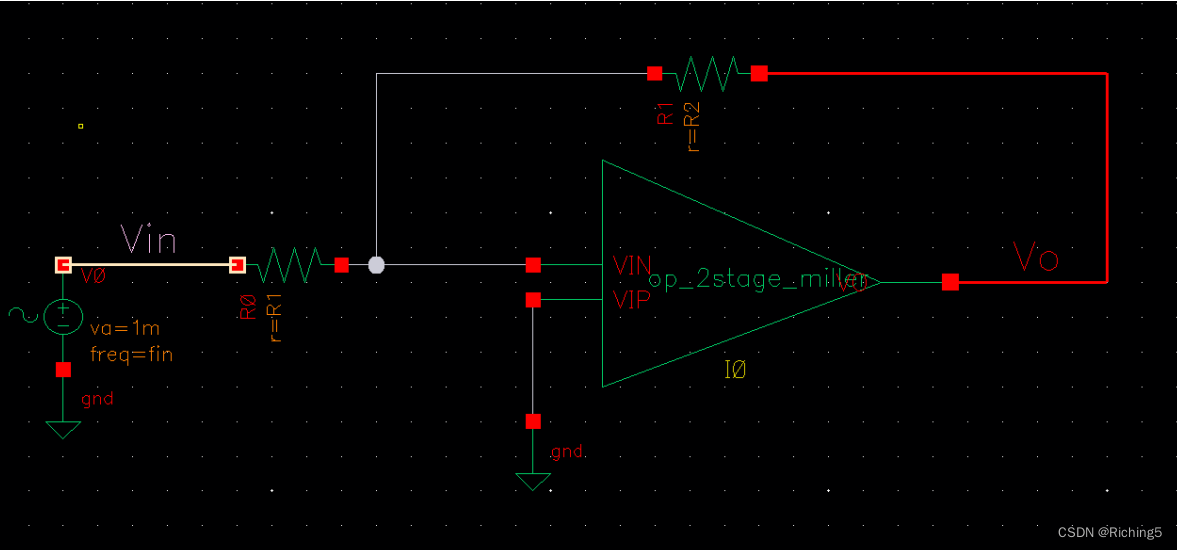
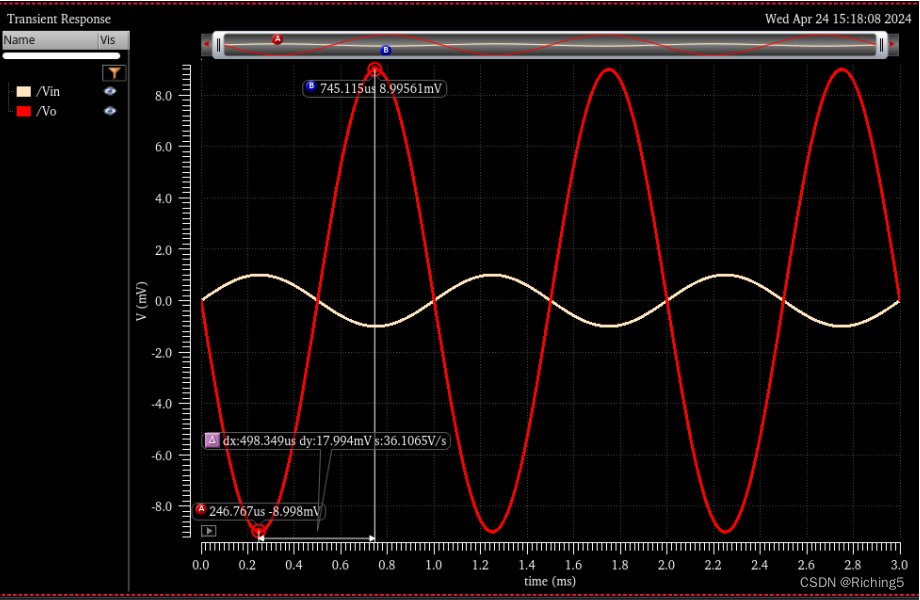
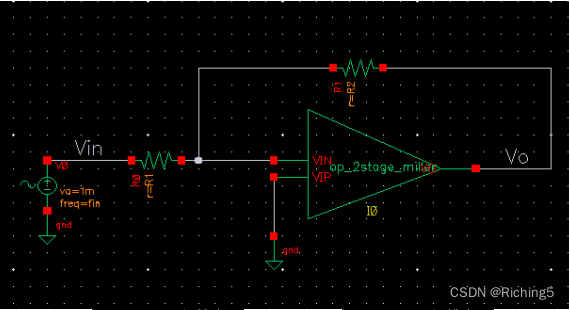
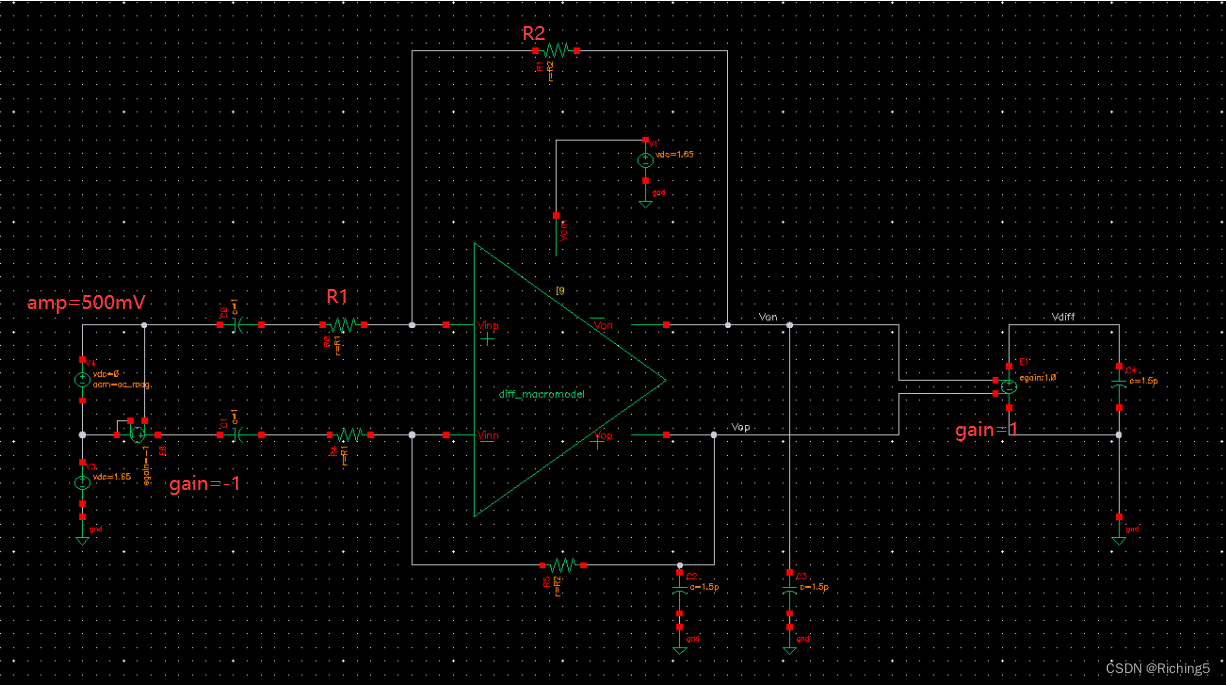
综上,反馈系数越大,PM越小,环路增益越高,环路增益的GBW越高,闭环增益越低,闭环增益的GBW不变。 四、环路增益、闭环增益和相位的仿真这个部分尝试分别用双入单出和全差分运放构成的反馈系统来仿真环路增益、闭环增益和PM。 4.1 运放为双入单出时使用的运放为一个理想元件构成的二级密勒补偿运放,零和次极点相抵消,GBW内只有一个极点,其性能指标为: 用上述电路构成一个反相比例放大电路: Vo=-R2/R1*Vi
设置R2=900k,R1=100k,输入频率为1kHz,幅度为1mV的信号时,输出幅度为9mV,频率为1kHz,因为反馈拓宽了带宽(闭环带宽远大于运放带宽),所以并不会衰减信号。
仿真闭环增益的电路如下,对其进行闭环仿真。
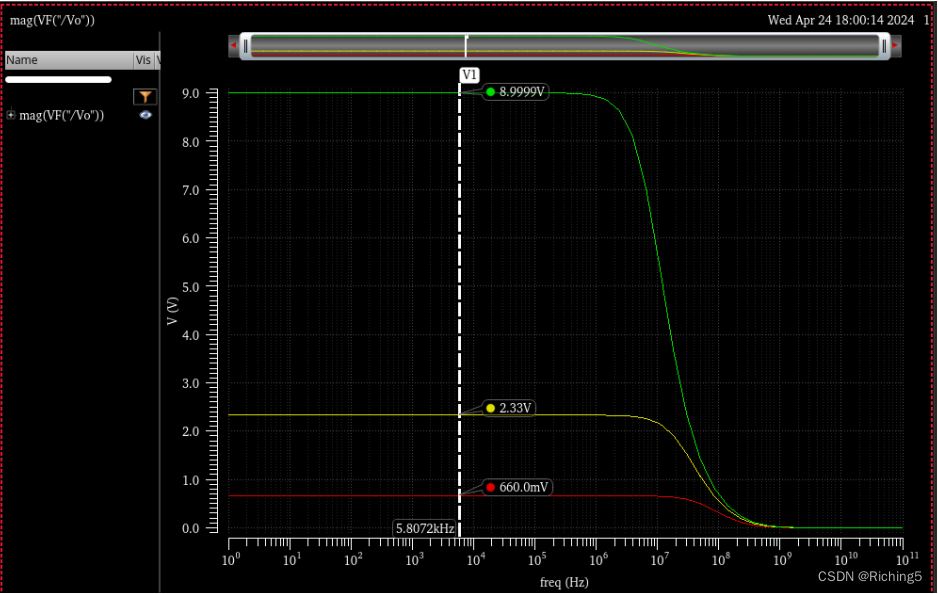
分别设置β=0.1/0.3/0.6=R1/(R1+R2),则闭环增益分别为10(20dB)、3.3(10.4dB)、1.6(4dB)得到以下闭环增益曲线:
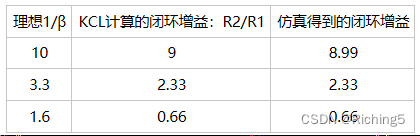
可以看到闭环增益并不严格等于1/β=1+R2/R1,这主要是没有去考虑加载效应对开环增益和反馈系数的影响,而如果采用KCL计算出来的闭环增益是R2/R1,这是更接近仿真中的闭环增益:
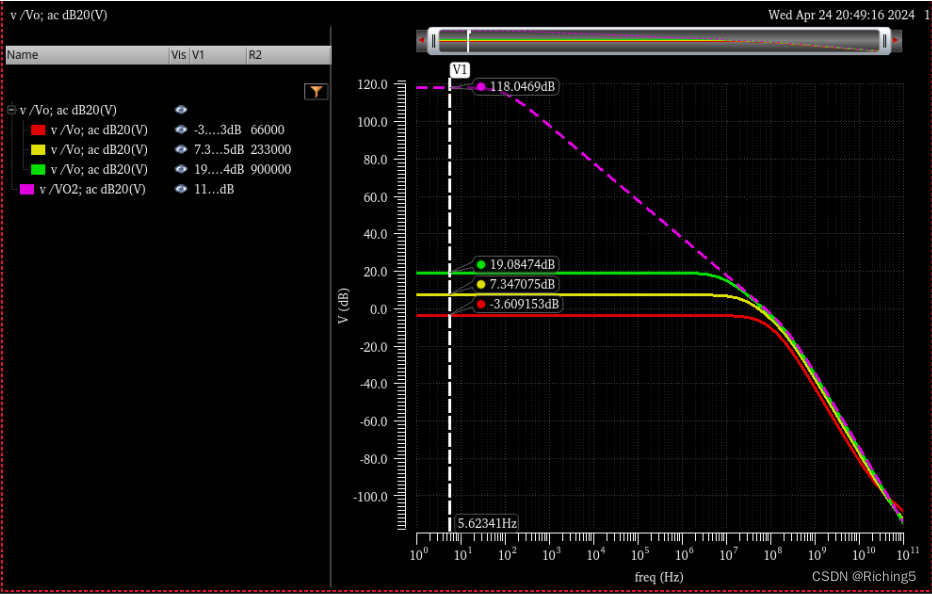
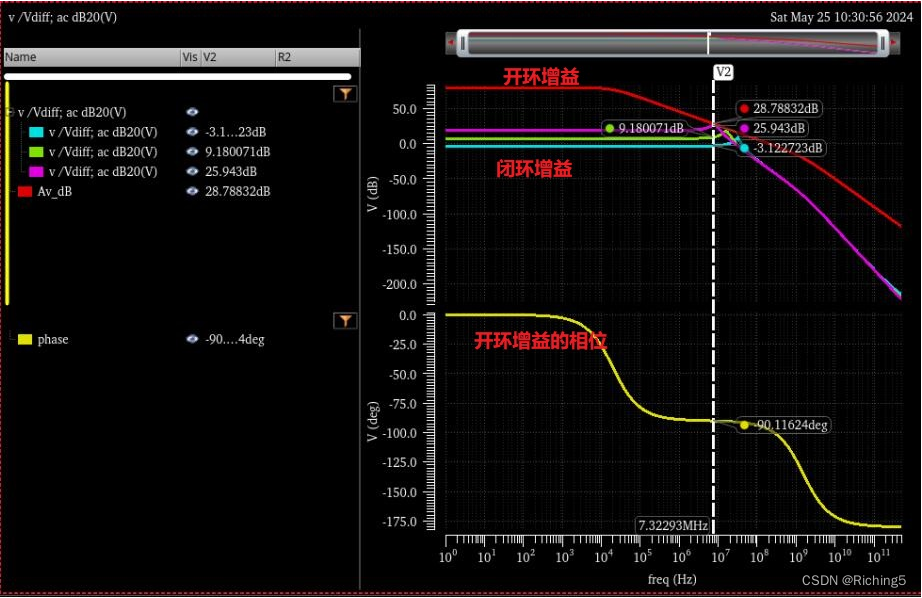
将运放开环增益(粉色)和不同β的闭环增益绘制幅频特性曲线在对数坐标系下,和第三节图对应:随着R2的增加,β降低,闭环增益的带宽降低,GBW变化并不显著。
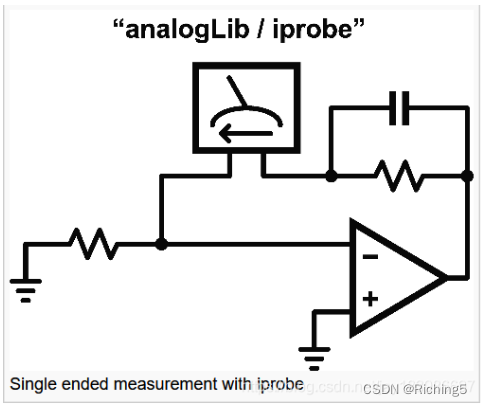
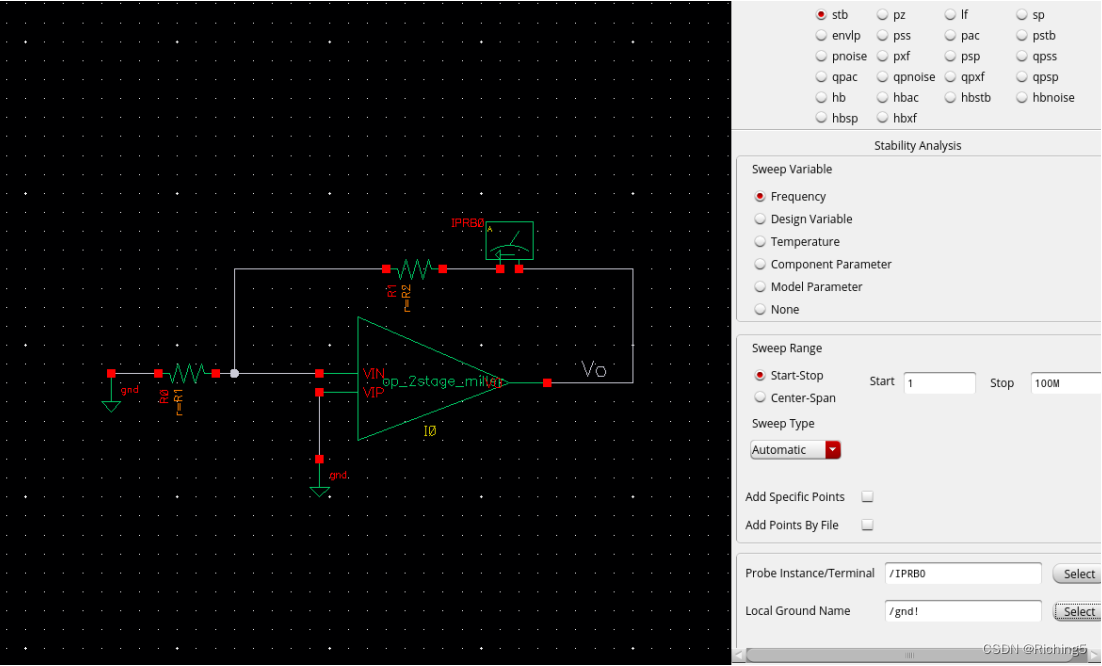
将iprobe放在环路中,极性不重要,输入交流接地,设置stb仿真:
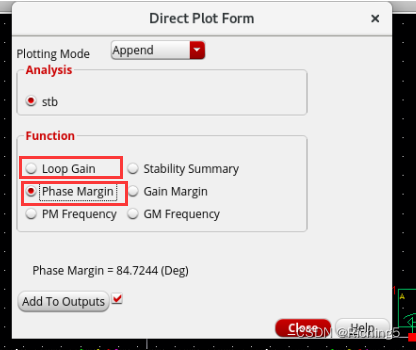
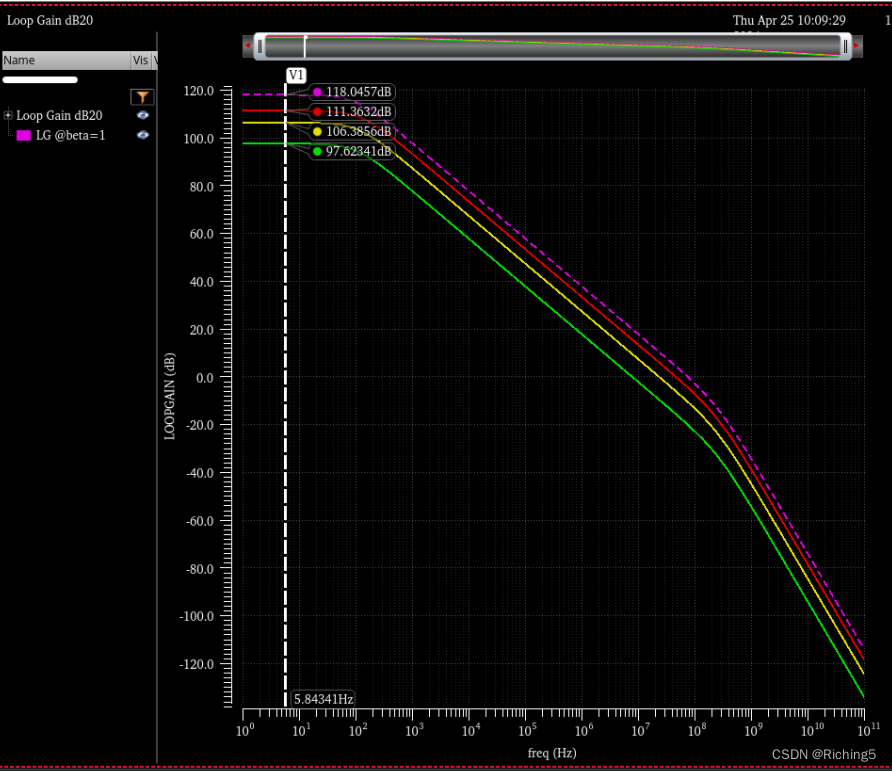
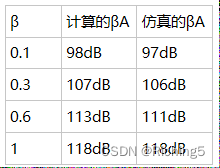
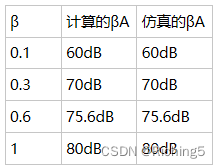
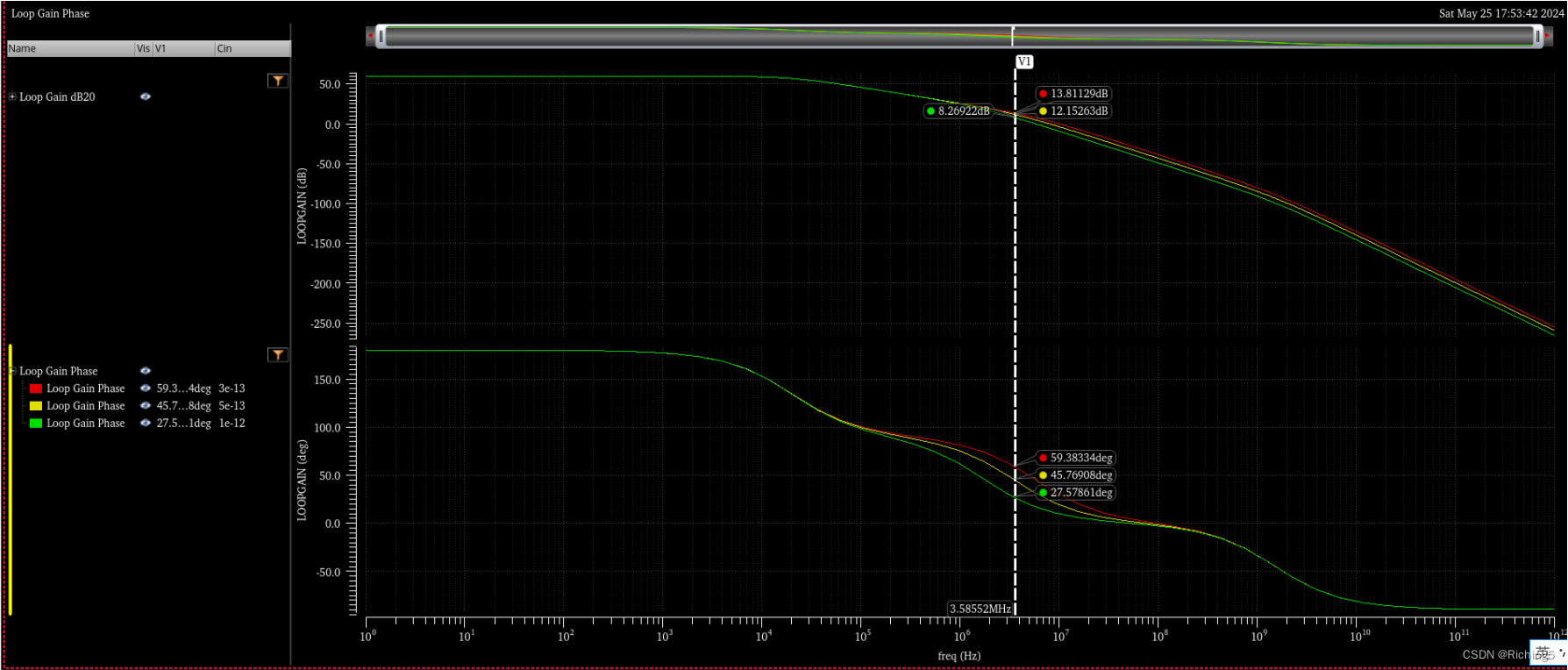
分别设置β=0.1/0.3/0.6/1,得到以下环路增益的幅频曲线:可见仿真的环路增益和理论计算值还是很接近的。注意这里的Phase Margin就是实际的PM,不用再加180°。
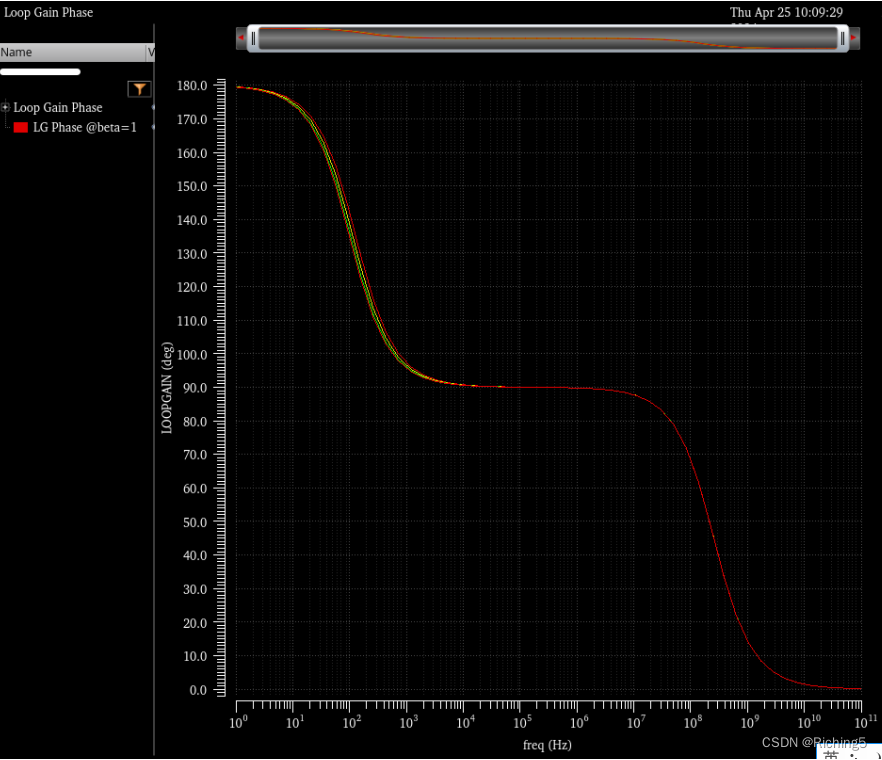
β对相位曲线并没有显著影响,因为这里的β是实数:
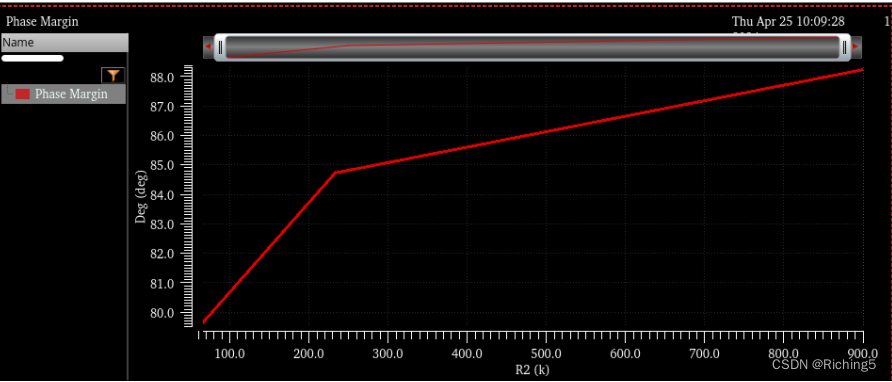
环路增益的PM随着β的降低而增加:
除了用stb确定环路增益的PM,还可以开环仿真找到Gain为1/β处的相位裕度就是实际的相位裕度。因为开环相位裕度和闭环增益的相位裕度是一样的,因为β是一个实数,从开环传递函数H(s)到环路增益βH(s)并不会改变相位频率曲线。 4.2 运放为全差分时使用的全差分运放为建模的全差分运放,其性能指标如下: 仿真闭环增益电路图如下:注意反馈电阻两端的连接。
分别设置β=0.1/0.3/0.6=R1/(R1+R2),将闭环增益和开环增益画在一起:结果和4.1.1类似,但在闭环增益的主极点处有尖峰且随β增加而显著。从SansenP110中可以知道尖峰是由于PM不足导致的,但从开环增益的相位来看明明PM是充足的,存在矛盾。
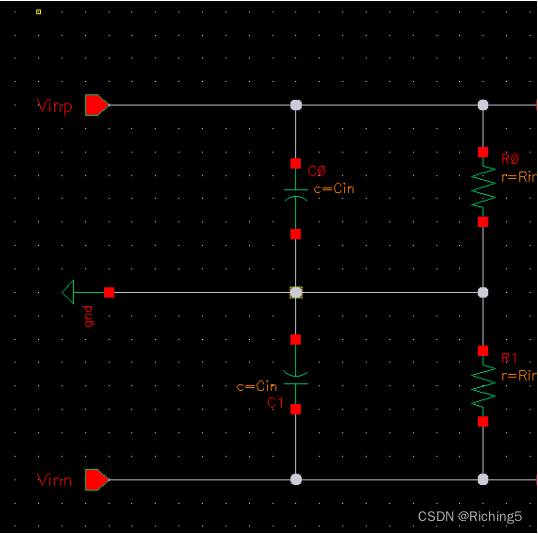
先给结论,这是因为所使用的理想运放建模的输入电容Cin=500f较大,输入电容和反馈电阻形成了额外的极点,但这个极点在开环增益、相位和闭环增益中并看不到。这就是这种方法的局限性。接下来用stb测LG的方式进行验证。
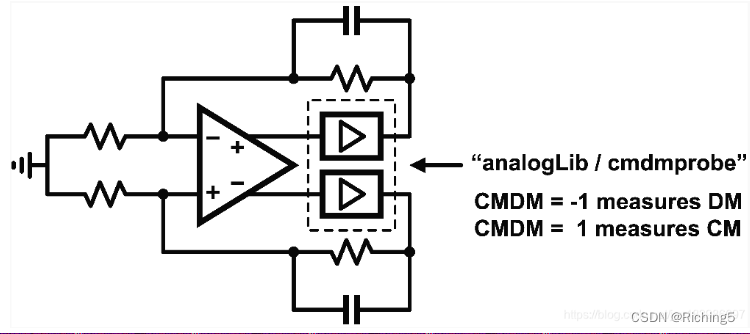
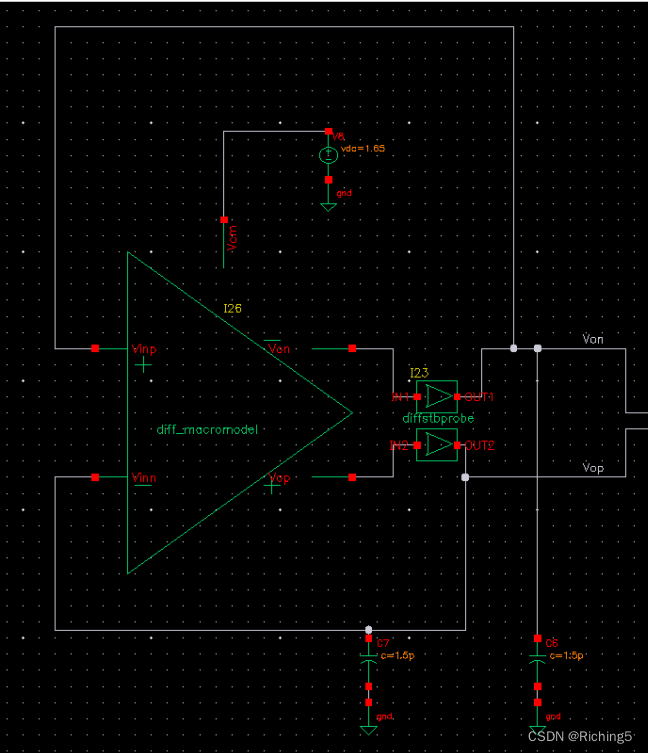
这里使用diffstbprobe接入环路进行仿真。
也可以使用cmdmprobe,但要设置CMDM=-1
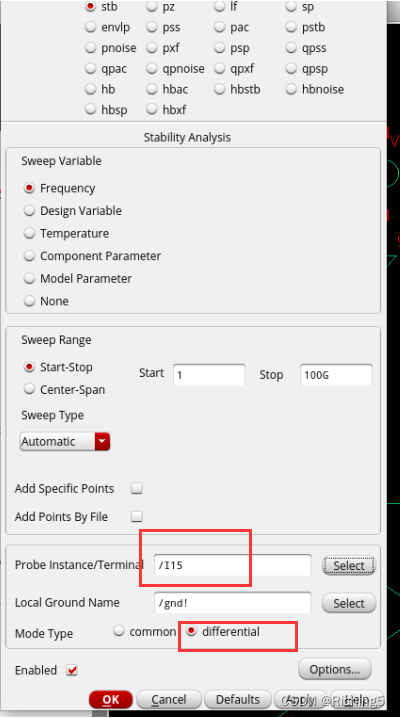
设置stb仿真,选择图中的diffstbprobe
仿真单位增益的电路如下:不需要输入提供DC,而是通过单位反馈运放自己确立DC。
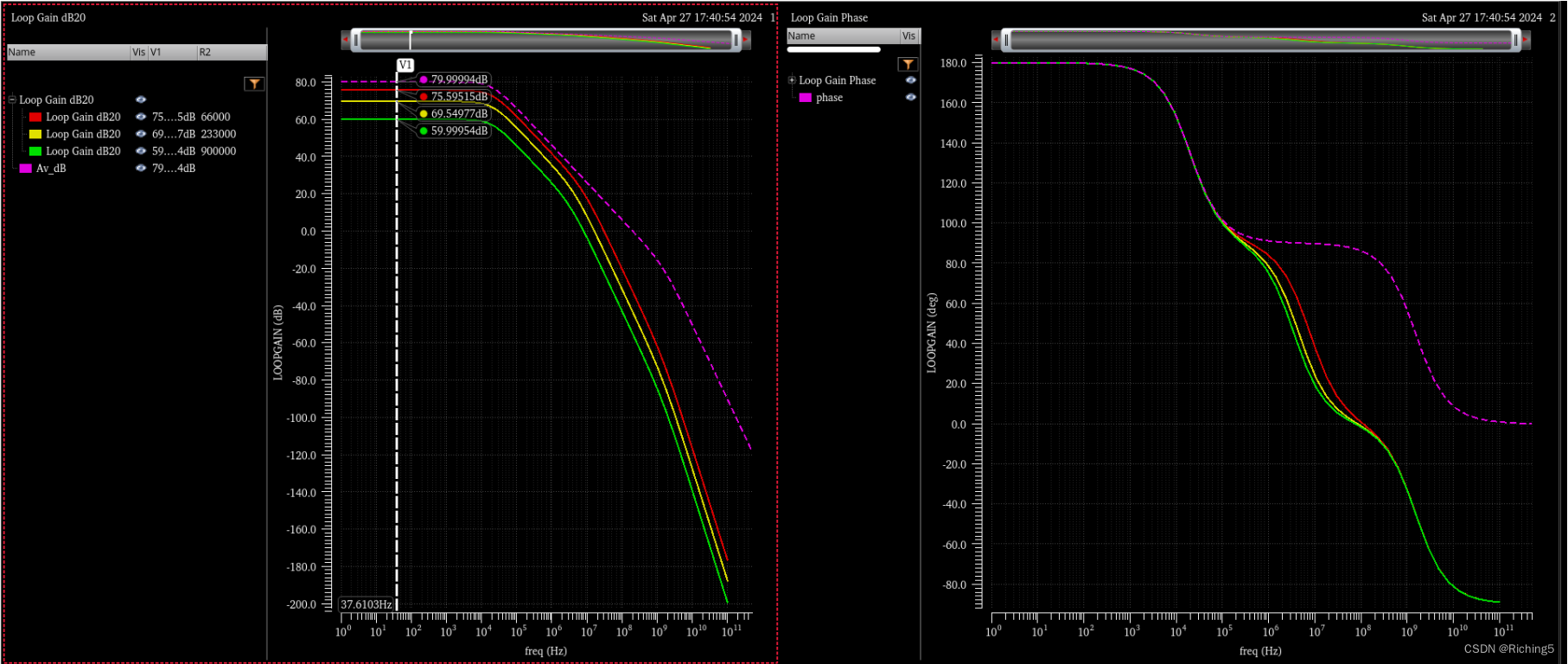
不同反馈系数下的LG的频率特性曲线和预期基本一致。
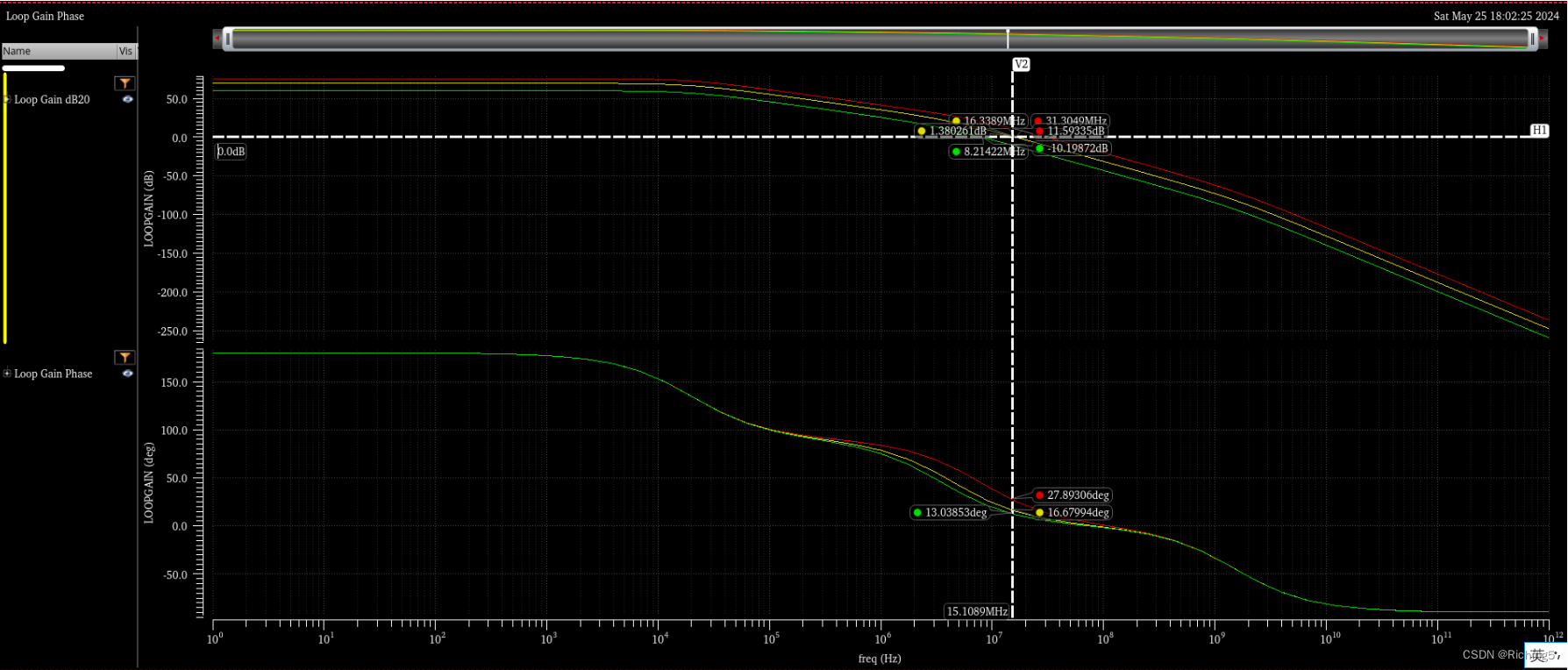
但可以看到电阻反馈时LG的极点数目相比于单位负反馈时多了一个,位于开环增益的主次极点之间,通过调整输入电容Cin可以看到LG中间的极点位置会变化,这验证了前面的结论,且Cin=500f,R1=100k,R2=900k,可以计算出f=1/(2piR1R2/(R1+R2)*Cin)=3.5Mhz和图中对应。
画出β=0.1/0.3/0.6时的LG
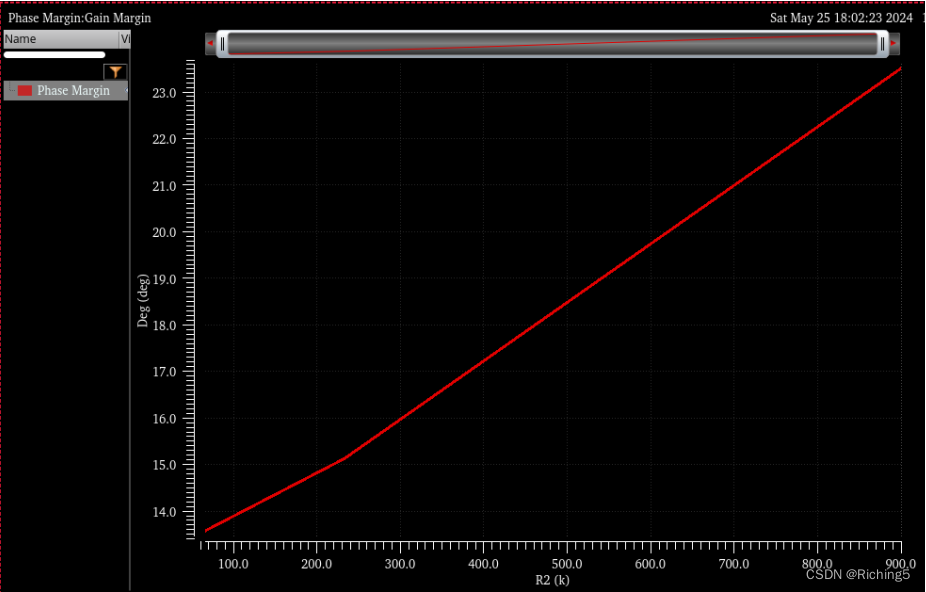
可以看到实际上PM是很小的,这也是前面闭环增益的尖峰的原因。
不论全差分还是双入单出,稳定性判断、PM计算就在闭环时用stb仿真,根据Loop gain=0dB时的Loop gain phase计算PM。对于通用运放,就在单位反馈下用stb仿真PM和稳定性;对于特定应用场景,将运放接成特定负反馈系统再进行stb仿真PM和稳定性。 |
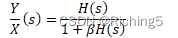 H(s)为运放开环增益。
H(s)为运放开环增益。 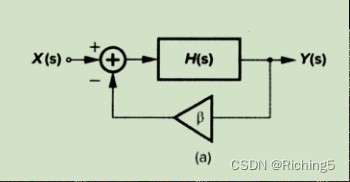

 https://bbs.eetop.cn/thread-970084-1-1.html
https://bbs.eetop.cn/thread-970084-1-1.html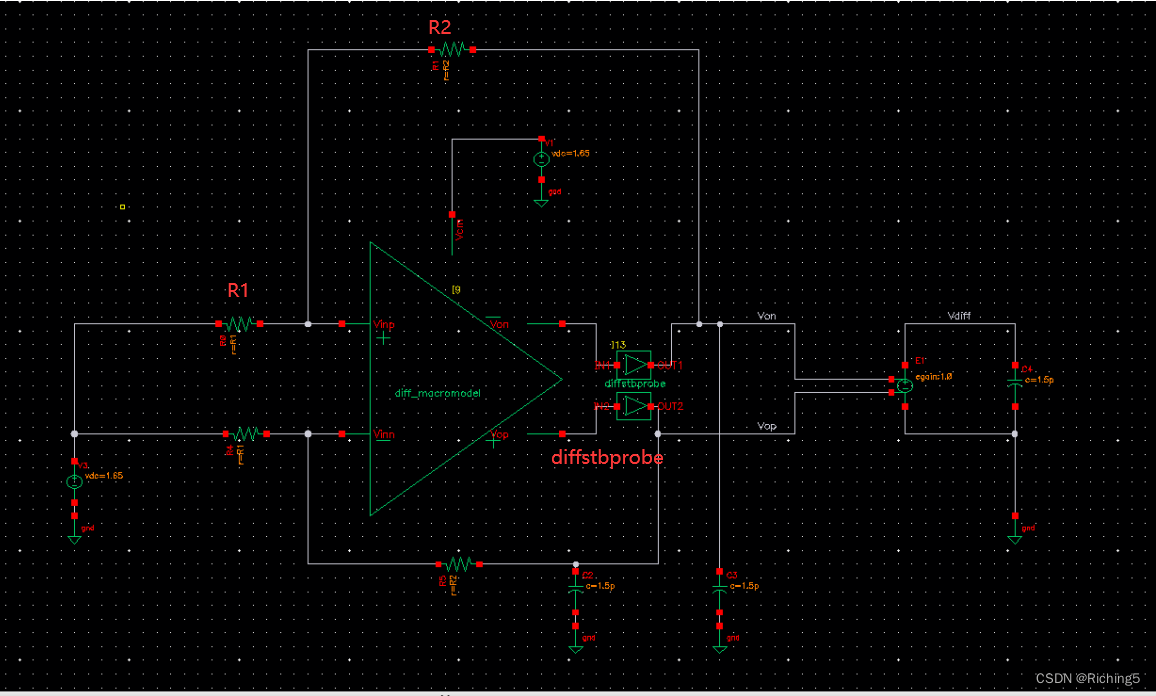

【本文地址】