泊车功能专题介绍 |
您所在的位置:网站首页 › 停车与泊车 › 泊车功能专题介绍 |
泊车功能专题介绍
|
文章目录
介绍术语
系统定义系统架构系统类型
应用场景安全场景简介安全场景定义介绍安全场景外部环境
安全场景定义开启场景结束场景车位被占用搜索车位无空闲车位路口/出入口/跨层通道减速障碍物阻挡发生碰撞车辆离线光线变化天气变化环境变化常见障碍物类型
行人安全场景车辆向前直行,前方出现行人车辆向前直行,侧向行人靠近车辆向后直行,后方出现行人车辆向后直行,侧向行人靠近车辆向前转弯,转弯路径上出现行人车辆向前转弯,侧向行人靠近车辆向后转弯,转弯路径上出现行人车辆向后转弯,侧向行人靠近车辆前向下坡直行,前方出现行人车辆前向下坡直行,侧向行人靠近车辆向前上坡直行,前方出现行人车辆向前上坡直行,侧向行人靠近车辆向前下坡转弯,转弯半径上出现行人车辆向前下坡转弯,侧向行人靠近车辆向前上坡转弯,转弯半径出现行人车辆向前上坡转弯,侧向行人靠近
行人安全特殊极端场景行人从遮挡物后快速冲出(鬼探头)/遮挡物后出现静止障碍物场景行人横躺在行车路径身高小于80cm 的行人
介绍
术语
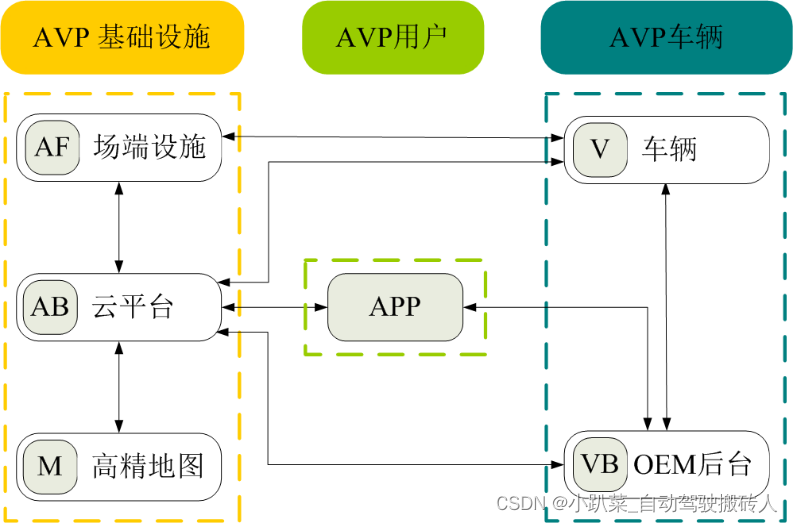
1. AVP —— 自主代客泊车(Automated Valet Parking) 2. AVP专用标识 —— 在AVP产品中,认为布置在停车场内外的具有一定规则,用于辅助车辆定位的标识。 3. 响应延迟时间 —— CAN总线发出目标指令到对应设备开始执行的时间。 4. 执行时间 —— 设备开始执行目标指令到反馈信号参数第一次达到目标参数所持续的时间 5. 最大超调量 —— 设备在执行指令的过程中,实际反馈信号参数超过目标参数的最大误差值。 6. 超调时间 —— 设备在执行指令的过程中,反馈信号参数第一次到达目标参数的时刻至反馈信号第一次的时间。 7. SOTIF —— Safety of the Intended Funcationality。由于预期功能不足而造成的危险或由于合理预见的人员滥用而造成的不合理风险的不存在,被称为预期功能的安全性(SOTIF) ——ISO21448。 8. V2X —— 车用无线通讯技术(Vehicle to Everything) 9. V2V —— 车与车之间的交互通讯(Vehicle to Vehicle) 10. V2I —— 车与路之间交互通讯(Vehicle to Infrastructure) 11. ODD —— 设计运行区域(Operational Design Domain) 系统定义自主代客泊车系统(Automated Valet Parking,以下简称 AVP)定义:用户在指定下客点下车,通过手机 APP下达泊车指令,车辆在接收到指令后可自动行驶到停车场的停车位,不需要用户操纵与监控;用户通过手机 APP下达取车指令,车辆在接收到指令后可以从停车位自动行驶到指定上客点;若多辆车同时收到泊车指令,可实现多车动态的自动等待进入泊车位。车辆自动行驶过程中应能遵守道路交通规则,或停车场运营方所制定的场内交通规则。 系统架构 AVP系统架构概要图。本系统架构图旨在为阅读理解本文件提供参考,不做强制性要求,各系统设计供应商可以根据各自技术优势设计各自系统的架构。 AVP系统典型架构中各个子系统所承担的功能可按照下表进行分配: AVP系统功能分配 子系统名称 主要功能 用户前端(APP) 1. 发送预约/取车请求2. 接收/通知车辆状态 场端设施(AF) 1. 检查ODD状态2. 自动驾驶过程中的紧急/故障工况处理3. 场端感知及判断 云平台(AB) 1. 停车位状态监控2. 预约停车位3. 车位分配4. 全局路径规划 地图(M) 1. 地图管理 车辆(V) 1. 车端感知及判断2. 车辆定位3. 局部路径规划4. 车辆运动控制 车辆后端(VB) 1. 车辆远程唤醒和启动根据AVP系统功能分配的不同,国内AVP系统分类如表所示:Type1为车端智能子系统,Type2为场端智能子系统,Type3为车和场相互协同子系统。 AVP系统分类 功能 Type1 Type2 Type3 车位分配 V/AB AB/AF AB 全局路径规划 V AB/AF AB 感知判断 V AF V&AF 定位 V AF V&AF 局部路径规划 V AF V 车辆运动控制 V V V 应用场景 安全场景简介 安全场景定义介绍AVP场景定义,定义了AVP自主泊车系统运行时,常见的应用场景,常见的安全相关的场景。这些场景的定义帮助AVP自主泊车系统测试适用性,安全性。AVP量产项目通过这些场景的测试,提升AVP在使用时的体验,减少或避免AVP在运行时对人身安全造成的伤害。 安全场景外部环境AVP自主泊车系统运行,会受到光照、天气、路面环境等外因影响,在测试时,根据车辆使用场景在不同的环境中进行多次测试。典型的外部环境因素如表所示。 AVP安全场景外部环境因素 光照 天气 路面材质 |
【本文地址】
今日新闻 |
推荐新闻 |