【雷达原理】雷达测速原理及实现方法 |
您所在的位置:网站首页 › 保安行业未来发展前景怎么样 › 【雷达原理】雷达测速原理及实现方法 |
【雷达原理】雷达测速原理及实现方法
|
一、雷达测速原理
1.1 多普勒频率
当目标和雷达之间存在相对运动时,若雷达发射信号的工作频率为 如图1-1所示,照射到目标上的波形具有间隔为 所以有以下结论:当目标靠近雷达运动时,多普勒频率为正;当目标远离雷达运动时,多普勒频率为负。 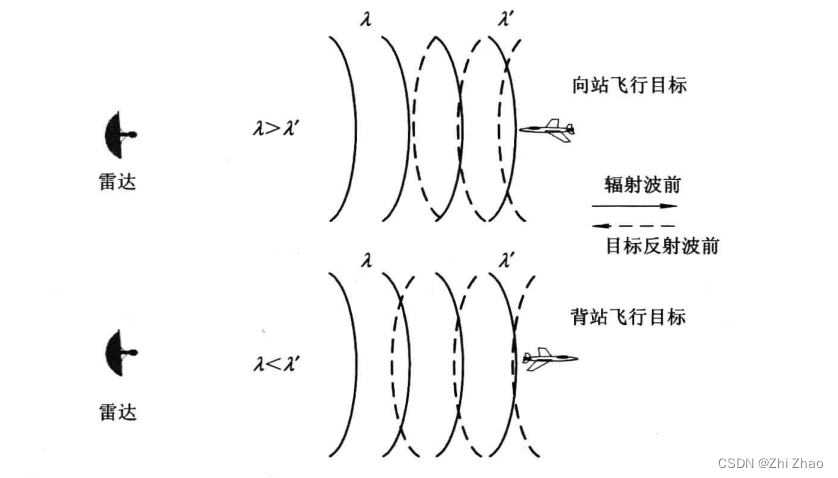 图1-1 多普勒效应
图1-1 多普勒效应
下面将给出多普勒频率的计算公式,其证明过程可以参考书本上的推导。 设目标的径向速度为
通过发射两个时间间隔为Tc的线性调频信号,则接收到的每个脉冲对应的距离维FFT将在同一个位置具有峰值,但是峰值对应的相位不同。这两个峰值具有相位差,其与目标相对雷达运动产生的多普勒频率相关。 所以,当目标以速度v运动时,对应的相位差为:
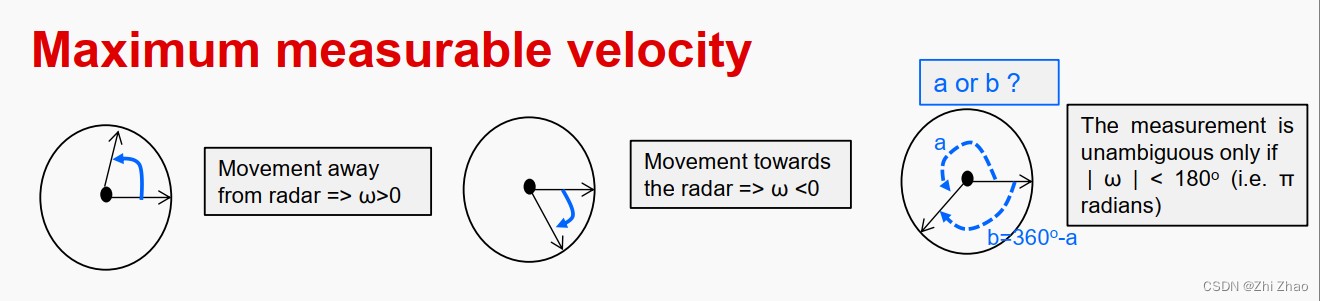
利用式(1.2-1)可计算出运动目标的速度。 (1) 最大测量速度
只有相位差满足
由此可得,当雷达以脉冲重复周期Tc发射信号时,可测量目标的最大不模糊速度为:
(2) 速度分辨率 当雷达前方有两个位置相近而速度不同(v1,v2)的目标时,我们可以发射一系列等间隔的线性调频信号对其进行测量,则距离维FFT的峰值位置相同,但这些峰值对应的离散序列有两个旋转向量(w1,w2),即回波信号的角频率。 帧:将N个等间隔周期的线性调频信号称为一帧; 多普勒维FFT:一帧脉冲间进行FFT,也称为速度维FFT; 雷达的速度分辨能力取决于多普勒维FFT的频率分辨率,两个速度差为△v的目标回波信号的角频率间隔为△w:
由离散傅里叶变换的特性可知,要分辨这两个角频率,需要满足:
联合式(1.2-4)和式(1.2-5)可得:
因而,速度分辨率为:
(3) 速度点精度 设一帧的脉冲数为N,对其进行多普勒维FFT的点数为
若
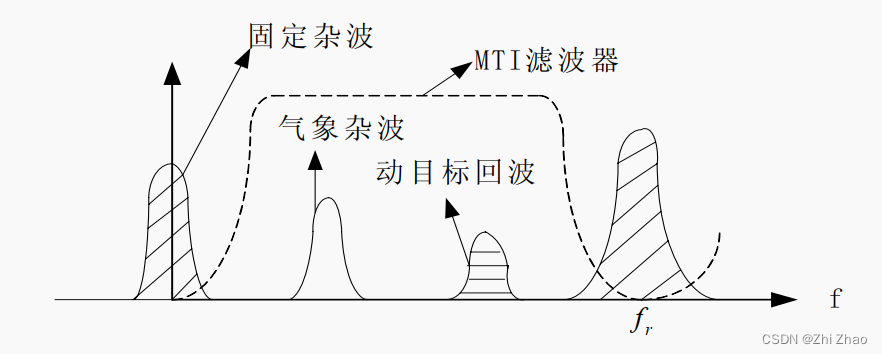 图2-1 MTI滤波器特性
图2-1 MTI滤波器特性
MTI滤波器虽然可以抑制杂波信号,但无法区分具有不同速度的运动目标回波信号,导致雷达无法实现对具有相同距离不同速度的运动目标的检测。动目标检测(Moving Target Detection,MTD)技术采用一组相邻且部分重叠的滤波器组,覆盖目标的整个多普勒频率范围,从每个滤波器的输出,获取对应目标的多普勒频率,从而得到运动目标的速度。 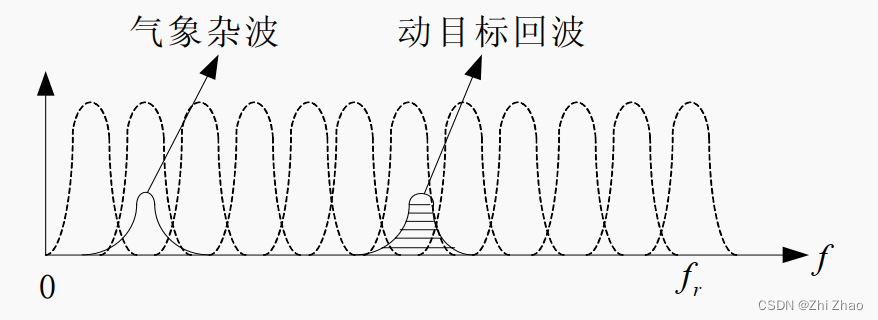 图2-2 MTD滤波器特性
图2-2 MTD滤波器特性
在工程应用中,通常采用(MTI+MTD)的方式,先利用MTI滤波器将雷达探测到的杂波及低速运动目标滤除,再采用MTD滤波器将不同速度的运动目标进行区分。 2.1 MTD算法原理MTD算法的实现方式有两类:时域上采用FIR滤波器,频域上采用离散傅里叶变换(DFT)。对脉冲压缩后的数据,在同一距离单元的多个脉冲采用FFT进行处理,可得到不同速度的运动目标。 具有N个输出的横向滤波器,经过各重复周期的不同加权求和后,可以作为N个相邻的窄带滤波器组。其原理性结构如图2-3所示。 每个滤波器的权值可表示为: 其中,i为滤波器的下标,k为同一距离单元的脉冲序列的下标,i=0,1,2,N-1,k=0,1,2,N-1。 可以得到MTD滤波器组的输入 上式与DFT的计算公式是等效的,所以可以用DFT实现MTD滤波器组。当N的取值为2的正整数次幂时,则可以采用DFT的快速算法——快速傅里叶变换(FFT)进行计算。 2.2 MTD算法仿真2024年2月15日更新:修改雷达参数、目标参数及回波模型。 设定3个目标,其距离分别为500米,1000米,2000米,速度分别为0m/s,8m/s,-5m/s,RSC分别为0.1㎡,1㎡,5㎡,利用上述目标参数产生模拟回波信号,对该信号进行二维FFT,即先在距离维上进行FFT,再对其多普勒维进行FFT,计算结果如图2-3目标幅度值与目标的RCS及距离有关。 目标运动模型为: 根据目标的运动模型可知:目标远离雷达时,速度为正;目标靠近雷达时,速度为负。 该模型中,距离点精度 R_point = 5.2698,速度点精度 V_point=0.0732,最大不模糊速度V_max=9.3685 如图2-3中,二维FFT处理后,静止目标的距离为(96-1)*R_point=500.63米,速度为0,目标2的距离为(191-1)*R_point=1001.3米,速度为V_point*(110-1)=7.97m/s,目标3的距离为R_point*(380-1)=1997.3米,速度为-V_point*(256-189)=-4.90m/s。 雷达目标回波模型经过信号处理后,计算的目标位置参数与实际设置的参数基本一致,测量误差在雷达的分辨力之内。 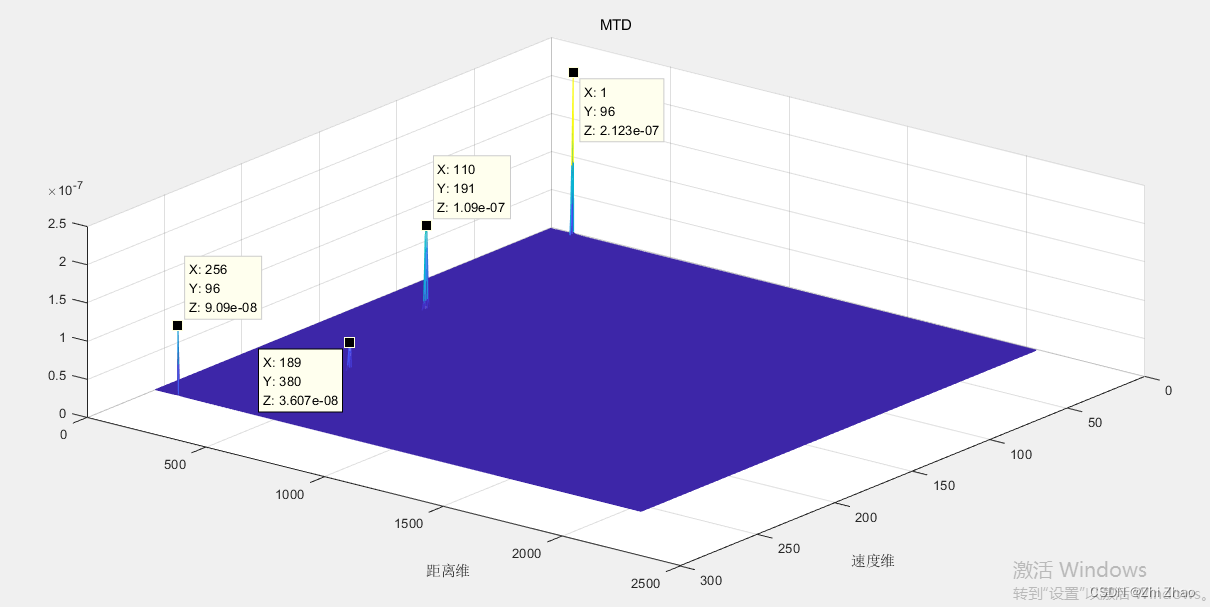 图2-3 二维FFT结果
三、MATLAB仿真代码
clc;
clear;
close all;
%% LFM信号参数
B = 25e6; % 带宽
PRT = 800e-6; % 脉冲重复周期
PRF = 1/PRT; % 脉冲重复频率
T_chirp = 600e-6; % 脉冲宽度
u = B/T_chirp; % 调频斜率
fs = 3e6; % 采样率
NumADC = round(T_chirp*fs); % 单个脉冲的采样点数
NumChirp = 256; % 脉冲数
c = physconst('LightSpeed'); % 光速
f0 = 10e9; % 载频
Lambda = c/f0; % 波长
R_max = fs*c/(2*u); % 最大测量距离
V_max = Lambda*PRF/4; % 最大测量速度
%% 目标参数
tarNum = 3;
tar_R0 = [500,1000,2000]; % 目标距离
tar_V0 = [0,8,-5]; % 目标速度
Rcs = [0.1,1,5];
%% 模拟信号
Phase_t = @(f0,u,t) 2*pi*(f0*t+1/2*u*t.^2); % LFM信号的相位表达式
Tt = (0:1/fs:(T_chirp-1/fs))';
Signal_Tx = exp(1j*Phase_t(f0,u,Tt)); % 发射信号
Signal_Rx = zeros(NumADC,NumChirp); % 多脉冲的目标回波信号
for jj = 1:NumChirp
Signal_temp = 0;
Rt = Tt+(jj-1)*PRT;
for kk = 1:tarNum
tar_R = tar_R0(kk)+tar_V0(kk)*Rt;
tao = 2*tar_R/c; % 目标回波的时延
Ar = Rcs(kk)./(tar_R.^4); % 目标回波幅度
Signal_temp = Signal_temp + Ar.*exp(-1j*Phase_t(f0,u,(Tt-tao))); % 接收信号
end
Signal_Rx(:,jj) = Signal_temp;
end
% 混频
Signal_Mix = Signal_Tx.*Signal_Rx;
rawData = Signal_Mix;
clear Signal_Tx;
clear Signal_Rx;
clear Signal_Mix;
%% 距离维FFT
Nfft1 = 2^ceil(log2(NumADC)); % FFT点数
R_point = (fs/Nfft1)*c/(2*u); % 距离点精度
delta_R = c/(2*B); % 距离分辨率
win1 = hamming(NumADC); % 加窗
fft_Data = zeros(Nfft1,NumChirp);
for ii = 1:NumChirp
fft_Data(:,ii) = fft(rawData(:,ii).*win1,Nfft1);
end
figure(101);
mesh(mag2db(abs(fft_Data)));xlabel('脉冲数');ylabel('距离维');title('1维FFT');
view([90 0]);
%% 速度维FFT
win2 = hamming(NumChirp); % 加窗
Nfft2 = NumChirp;
fft2D_Data = zeros(Nfft1,Nfft2);
for ii = 1:Nfft1
fft2D_Data(ii,:) = fft(fft_Data(ii,:).*win2',Nfft2);
end
V_point = Lambda*PRF/(2*Nfft2);
figure(103);
mesh(mag2db(abs(fft2D_Data)));xlabel('速度维');ylabel('距离维');title('MTD');
view([90 0]);
参考文献
图2-3 二维FFT结果
三、MATLAB仿真代码
clc;
clear;
close all;
%% LFM信号参数
B = 25e6; % 带宽
PRT = 800e-6; % 脉冲重复周期
PRF = 1/PRT; % 脉冲重复频率
T_chirp = 600e-6; % 脉冲宽度
u = B/T_chirp; % 调频斜率
fs = 3e6; % 采样率
NumADC = round(T_chirp*fs); % 单个脉冲的采样点数
NumChirp = 256; % 脉冲数
c = physconst('LightSpeed'); % 光速
f0 = 10e9; % 载频
Lambda = c/f0; % 波长
R_max = fs*c/(2*u); % 最大测量距离
V_max = Lambda*PRF/4; % 最大测量速度
%% 目标参数
tarNum = 3;
tar_R0 = [500,1000,2000]; % 目标距离
tar_V0 = [0,8,-5]; % 目标速度
Rcs = [0.1,1,5];
%% 模拟信号
Phase_t = @(f0,u,t) 2*pi*(f0*t+1/2*u*t.^2); % LFM信号的相位表达式
Tt = (0:1/fs:(T_chirp-1/fs))';
Signal_Tx = exp(1j*Phase_t(f0,u,Tt)); % 发射信号
Signal_Rx = zeros(NumADC,NumChirp); % 多脉冲的目标回波信号
for jj = 1:NumChirp
Signal_temp = 0;
Rt = Tt+(jj-1)*PRT;
for kk = 1:tarNum
tar_R = tar_R0(kk)+tar_V0(kk)*Rt;
tao = 2*tar_R/c; % 目标回波的时延
Ar = Rcs(kk)./(tar_R.^4); % 目标回波幅度
Signal_temp = Signal_temp + Ar.*exp(-1j*Phase_t(f0,u,(Tt-tao))); % 接收信号
end
Signal_Rx(:,jj) = Signal_temp;
end
% 混频
Signal_Mix = Signal_Tx.*Signal_Rx;
rawData = Signal_Mix;
clear Signal_Tx;
clear Signal_Rx;
clear Signal_Mix;
%% 距离维FFT
Nfft1 = 2^ceil(log2(NumADC)); % FFT点数
R_point = (fs/Nfft1)*c/(2*u); % 距离点精度
delta_R = c/(2*B); % 距离分辨率
win1 = hamming(NumADC); % 加窗
fft_Data = zeros(Nfft1,NumChirp);
for ii = 1:NumChirp
fft_Data(:,ii) = fft(rawData(:,ii).*win1,Nfft1);
end
figure(101);
mesh(mag2db(abs(fft_Data)));xlabel('脉冲数');ylabel('距离维');title('1维FFT');
view([90 0]);
%% 速度维FFT
win2 = hamming(NumChirp); % 加窗
Nfft2 = NumChirp;
fft2D_Data = zeros(Nfft1,Nfft2);
for ii = 1:Nfft1
fft2D_Data(ii,:) = fft(fft_Data(ii,:).*win2',Nfft2);
end
V_point = Lambda*PRF/(2*Nfft2);
figure(103);
mesh(mag2db(abs(fft2D_Data)));xlabel('速度维');ylabel('距离维');title('MTD');
view([90 0]);
参考文献
[1]陈伯孝, 等. 现代雷达系统分析与设计[M]. 西安:西安电子科技大学出版社, 2012.9. [2] Introduction to mmwave Sensing:FMCW Radars. |
【本文地址】