关于质点系虚位移原理的若干认识 |
您所在的位置:网站首页 › 位移法的原理 › 关于质点系虚位移原理的若干认识 |
关于质点系虚位移原理的若干认识
|
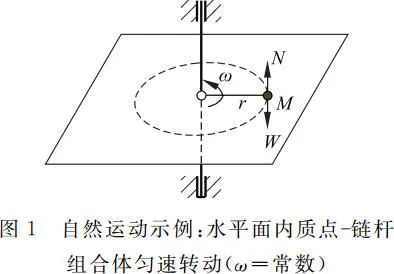
原创 王国砚 物理与工程 摘 要 虚位移原理是重要的力学基本原理之一,从理论力学(包括分析力学)到结构力学、弹性力学等课程都有应用。但从文献来看,关于虚位移原理的表述和理解目前似还存在一些值得探讨的地方,与其对应的有关概念也还有待深化理解。笔者分析了一些相关文献中的内容,针对虚位移原理表述、虚位移概念、内力虚功概念、虚位移原理充分性证明中的条件、虚位移原理与虚功原理的关系等问题,给出笔者的若干认识,希望有助于深化对虚位移原理若干基本概念的理解。 关键词 虚位移原理;虚位移;质点系;内力虚功;充要条件 Abstract The principle of virtual displacement is one of the important fundamental principles in mechanics and is widely used in the courses from theoretical mechanics (including analytical mechanics) to structural mechanics and elasticity, etc. However, from the literature, it seems that there are still some rooms of study on the statement of it and the understanding of it; the understanding of relevant concepts may need to be deepen further. The contexts in some relevant references are analyzed and some perspectives are given in this paper to the problems related to the principle of virtual displacement such as, the statement of the principle of virtual displacement, the concept of virtual displacement, the concept of virtual work done by internal force, the conditions in the proof of the sufficiency of principle of virtual displacement, the relationships between the principles of virtual work and virtual displacement, etc. Hopefully, the perspectives can help to deepen the understanding of some basic concepts in the principle of virtual displacement. 虚位移原理是力学中最基本、最重要的原理之一。理解该原理及其成立的条件,是正确运用该原理的基础。 虚位移原理从萌芽到提出历经了近两千年[1];从提出到形成完整的理论体系,距今也有近五百年历史了[1,2,3]。从发展历程和目前力学课程教学体系看,虚位移原理最初是以虚速度原理被提出的,后被改称为虚位移原理或虚功原理,由最基本的自由质点虚位移原理发展到受约束质点系虚位移原理,并逐渐发展到可变形连续体的虚功原理等,从而形成了贯穿整个力学课程的虚功原理体系。 然而,笔者在教学实践中发现,关于虚位移原理的表述和理解目前似还存在一些值得探讨的地方,与其对应的有关概念也还有待深化理解。这就引发了应该如何正确理解虚位移原理的思考。正确理解虚位移原理涉及到原理表述、原理中必要性和充分性命题及证明、虚位移、外力虚功和内力虚功等基本概念,涉及到虚位移原理与虚功原理的关系等问题。 本文针对质点系虚位移原理的表述、虚位移概念、内力虚功概念、虚位移原理充分性证明中的条件、虚位移原理与虚功原理的关系等问题,给出笔者的若干认识。希望能在深化对虚位移原理中若干基本概念的认识和理解方面起到抛砖引玉的作用。 1 关于质点系虚位移原理的表述和证明 虚位移原理的表述和证明,涉及到与平衡条件的关系、充分性和必要性命题等问题,也涉及到虚位移原理的发展历程,因此有必要梳理清楚其中的关系。 关于虚位移原理的认识可追溯到公元前 267—前 212 年阿基米德基于杠杆原理提出静力平衡条件的时代。根据文献[1],在阿基米德给出杠杆原理的时代,亚里士多德及其学派也在考察杠杆原理的问题,并且关联了力作用点的位移。据此可以相信,自从有杠杆原理、平衡条件开始,就有了虚位移原理的萌芽。但直到 1717 年,才由约翰·伯努利系统性地提出了虚位移原理,只不过当时称为虚速度原理[2,3]。拉格朗日则针对约束质点系提出广义坐标描述法,并据此以质点系虚位移原理为出发点,结合达朗贝尔原理,建立了完整的分析力学体系[2,3]。在今天我们谈论质点系虚位移原理时,一般都是以拉格朗日的表述为出发点的。 文献[2]对虚位移原理的表述作了系统全面的介绍。从中可以看出,拉格朗日的虚位移原理,最初也是以虚速度原理的提法给出的,其表述为“如果任何数目的物体或点的某个系统,在每个物体或点受到任何力的作用而处于平衡,如果给这个系统任何小的运动,结果每个点走过无限小路程,即发生虚速度,那么力与每个沿力方向产生的相应路径的乘积之和总等于零”[2]。之后,大约在 19 世纪末到 20 世纪初,阿佩尔 ( APPELL P T ) 又给出了看上去与拉格朗日不太一样的虚位移原理表述。阿佩尔的虚位移原理也是以虚速度原理的提法给出的,但其表述为“系统平衡的充分必要条件是,对为约束允许的任何虚位移,直接作用力的虚功之和等于零”[2]。 可见,这两种表述的含义是有所不同的。在拉格朗日的虚位移原理中,没有采用“充分必要条件”形式进行表述,用的是“任何力”的提法,没有明确指出其前提条件[2]。而在阿佩尔的虚位移原理中,采用“充分必要条件”形式进行表述,用的是“直接作用力”的提法,但其前提条件是双面无摩擦约束,且应理解为理想约束[2]。阿佩尔的“直接作用力”被后人简称为“主动力”。 俄罗斯学者也给出了虚位移原理的表述,但多数表述与阿佩尔的类似,例如 Воронков 的表述为“使具有理想约束的系统在给定位置处于平衡的必要和充分条件是,所有作用于系统的主动力在此位置上发生的系统所有虚位移上的元功之和等于零”[2],其中明确以“充分必要条件”形式进行表述,明确用主动力的提法,明确给出理想约束的前提条件。根据文献[3],科里奥利在 19 世纪初给出了如下表述:“在理想完整的约束中,主动力在虚位移上所作的总功为零”,可见其也强调理想完整约束和主动力,但未提充分必要条件。事实上,由达朗贝尔和拉格朗日开创的非自由质点系动力学也是基于约束的理想性假定的;根据这个假定所建立的虚位移原理以及动力学普遍方程中消除了约束力,从而使得问题变得简单了[2]。 我国力学界前辈,如周培源、汪家訸等,在叙述质点系虚位移原理时则主要沿用了阿佩尔的表述或俄罗斯学者的表述[2]。 据此可认为,从阿佩尔开始,虚位移原理以“充分必要条件”形式进行表述;在此之前,主要是沿用约翰·伯努利和拉格朗日的表述,它们只相当于阿佩尔表述中的必要性命题。 文献[2]认为,“虚位移原理可以不去证明”,其理由是原理无需证明。对此,笔者有如下理解。 在上述虚位移原理表述中,涉及到两个简单命题:(1)系统处于平衡状态;(2)主动力(或任何力)在虚位移上的虚功之和等于零。拉格朗日表述和阿佩尔表述的主要区别在于“充要条件”的提法。笔者对此的理解是: (1)拉格朗日的表述没有明确指出这两个简单命题之间的“充要条件”关系,没有说“主动力在虚位移上的虚功之和等于零”是“系统处于平衡状态”的充要条件。它只是陈述了一个客观事实,或如实记录了一个物理现象。因而,该表述具有公理属性,可不证明。 (2)阿佩尔的表述中明确将“主动力在虚位移上的虚功之和等于零”列为“系统处于平衡状态”的充要条件,建立了这两个简单命题之间的“充要条件”关系。这种表述就具有了定理的属性,因而需要证明。 文献[2]针对阿佩尔表述的虚位移原理充分和必要性命题的证明,作了较详细的阐述。 2 关于虚位移原理充分性证明中“系统原来处于静止”的前提条件 文献[2]认为,阿佩尔对虚位移原理充分性的证明只有在双面理想完整定常约束等条件下能成立。因为,阿佩尔关于充分性证明的关键是,“只需证明,如果系统不处于平衡,那么至少存在一个为约束所允许的位移,对此位移 TD 异于零”(“TD 为给定力的功之和”)[2],而这个位移应为实位移,这就要求所设虚位移应沿与实位移一样的方向。文献[2]认为,“这就要求实位移是虚位移之一”,“在双面理想完整定常约束下,以及双面理想非完整齐次约束下,实位移就是虚位移之一”。 文献[4]和文献[5]等在讨论虚位移原理充分性证明时,不仅强调双面理想完整定常约束的条件,还强调应增加“系统原来处于静止”的前提条件。在这里,“系统原来处于静止”指的是,如果质点系原来是静止的(相对于惯性参考系),在主动力系作用下它仍然保持静止[4]。之所以强调增加这个条件,是为了排除一种称为“自然运动”[5]的情形。 什么是自然运动情形?按笔者的理解,类似于刚体匀速定轴转动之类的运动,可作为自然运动的例子。 例如,图 1 所示的系统是将构成单摆的质点链杆组合体放置在光滑无摩擦的水平面上、链杆支座为固定在竖轴上的理想铰,符合双面理想完整定常约束条件。可以看出,质点 M 的重力 W 与水平面的竖向支承反力 N 始终保持平衡,系统可有无限多个平衡位置。当以某种初速度使质点链杆组合体在水平面内作匀速转动时(ω =常数),可以证明,所有主动力在虚位移上所作虚功之和为零。但系统明显不处于静力意义上的平衡状态,因为链杆支座处的水平约束反力并不等于零,且在水平面内没有其他力与之构成平衡力系。最多只能认为,在达朗贝尔原理的意义上,该支座反力与质点的离心惯性力保持“平衡”。
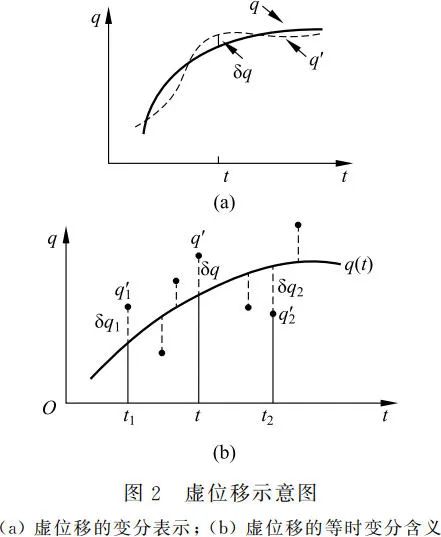
所以,对于自然运动的情形,虚位移原理的充分性命题得不到证明[4,5]。 从文献[2]介绍的情况来看,在一些国际著名学者的虚位移原理的表述和证明中,只有 Суслов 在虚位移原理充分性证明中指出,“系统的平衡位置是指在此位置上系统长期处于静止状态”,而在拉格朗日和阿佩尔等人的虚位移原理表述及证明中都没有提及“系统原处于静止”这个前提条件。国内一些主要《理论力学》教材,如文献[4]、[6]等,都认为在质点系虚位移原理表述中应提“系统原处于静止”这个条件。 笔者认为,在虚位移原理的表述中,的确需要排除“自然运动”的情形。但问题是,如果增加“系统原处于静止”的条件,岂不就将“匀速直线运动”情形也排除在外了,即意味着虚位移原理只适用于静止平衡状态?笔者的观点是,在证明虚位移原理的充分性命题时,不应将匀速直线运动情形排除在外。毕竟,(相对于惯性参考系的)匀速直线运动也应属于一种静力平衡状态,虚位移原理也理应适用。 文献[5]在证明阿佩尔表述的虚位移原理时,是从动力学方程出发,以“加速度等于零”为标志来证明虚位移原理的必要性和充分性命题。因为,系统处于静力平衡状态的标志应该是系统各质点的加速度为零;或者说,如果系统内各质点的加速度为零,则可认为系统处于静力平衡状态。 据此,笔者认为,在证明虚位移原理的充分性命题时,未必一定要限制于“系统原处于静止”,而只需增加“系统原处于(静力)平衡状态”的条件即可。由于一般所指的“平衡状态”即指静力平衡状态,所以不加“静力”两个字也可以。 所以,从原理充分性命题成立条件和排除“自然运动”两方面要求考虑,在阿佩尔的虚位移原理中似应增加“系统受双面理想完整定常约束(以及双面理想非完整齐次约束)”和“系统原处于平衡状态”等前提条件。而拉格朗日的虚位移原理由于仅是一个必要性命题,就不需考虑排除“自然运动”要求,对于系统所受约束的要求似也可相对较弱。 3 关于虚位移原理的另一种表述方式 根据文献[2],在分析力学中,一般将质点系所受到的力分为主动力和约束力;而在牛顿力学中,则分为外力和内力。分析力学中较多地是采用主动力和约束力表述虚位移原理,而在变形体力学等更广泛的领域则更多的是采用外力和内力表述虚位移原理。 文献[5]将质点系中的质点所受到的力分为两大类——内力和外力,其中内力指的是质点系内部各质点之间的相互约束力,而外力指的是外界对本系统的作用力(由其他系统施加);并基于外力和内力的分类法给出了虚位移原理的另一种表述:“原处于静止的质点系保持平衡的充要条件是,在体系的任何虚位移中,各质点所受外力所作的总功 W外 和内力所作的总功 W内 之和等于零,即:W外 + W内 = 0”。 笔者认为,这里应注意重点理解以下问题: 问题1:分析力学中的约束是否仅指外界对系统所施加的约束,系统内部各质点之间的相互约束是否也为约束?相应的约束力(比如,连接两个质点的弹簧两端的力等),是属于主动力,还是属于约束力?哪些约束力作功之和等于零? 问题2:文献[5]给出的虚位移原理表述和阿佩尔的虚位移原理表述是否等价? 对于以上问题,笔者的理解是: (1)质点系所受到的约束既包括外界对系统的约束也包括质点系内部各质点间的相互约束;质点之间的约束既包括刚性约束,按理说也应包括弹性约束(对于弹性系统)。因为,被弹簧连接的质点毕竟也是受到限制而不能完全自由运动的。 (2)但是注意到,在分析力学(包括理论力学)中,并没有将弹性约束当作约束看待。这是为什么呢?笔者的认识是,这可以从以下两方面来理解:①假如将弹性约束也当作约束看待,那它应属于非理想约束(因为相应的约束力在虚位移上作功之和一般不等于零),这样一来,虚位移原理岂不就无法直接运用到弹性系统了?但事实是可以运用;②从分析力学中对约束的定义看,约束应能限制质点的位置和运动,而这种限制应被理解为是完全限制,即应能起到减少系统自由度的作用,但弹性约束做不到这一点,所以它不符合分析力学中“约束”的特征。基于以上两方面因素,就不能将弹性约束也作为(分析力学意义上的)约束看待了。既然弹性约束不能被当作约束看待,那么其内的弹性恢复力也就不能当作约束力来看待了。但是,由于在分析力学中只将力分为主动力和约束力,所以既然弹性恢复力不能被当作约束力,也只好将其归为主动力了。这样一来,理想约束的约束力在虚位移上的虚功之和等于零的提法就不会出现矛盾了。 (3)另一方面,从文献[5]给出的表述看,似乎是将质点之间的相互约束力,即内力,也看作是一种主动力了。只不过,弹性约束力在虚位移上的虚功之和一般不为零,刚性约束力在虚位移上的虚功之和一般为零。笔者对此的理解是,在虚位移原理表述中所说的约束力(即被动力)与主动力的归类并不是一成不变的。在分析力学中,为了求出某个约束力,常用的手法往往是将该约束放松掉,代之以约束力,并将该约束力当作主动力看待。不论是外界对系统施加的约束,还是系统内质点间的相互约束,都可以这么做。 (4)基于上述对于内力的理解,笔者认为,文献[5]给出的虚位移原理表述和阿佩尔的虚位移原理表述是等价的。 4 关于虚位移原理中的虚位移 在一般概念中,虚位移是“为约束容许的任意微小的位移”,强调它与作功的力无关。在常见的结构力学教材中,尤其强调这一点。但问题是,虚位移与系统处于平衡状态时的真实位移状态是什么关系?它们之间是否也一点没关系?对此,笔者的认识如下。 虚位移的基本定义是:在给定的固定时刻为约束容许的所有假想(任意)的无限小位移[2,6]。从这个定义看,虚位移确实与系统处于平衡时的真实力状态和位移状态无关,具有任意性。但虚位移还可定义为(在固定时刻的)两个可能位移之差[2,4],而可能位移的定义是满足约束条件的无穷小位移[4]。由于真实位移是可能位移之一[4],所以又可将虚位移表述为在固定时刻的可能位移与真实位移之差,即:δq = q′-q,其中,q 为真实位移,q′ 为可能位移,δq 为虚位移,如图 2(a) 所示。这样表述的含义是,虚位移可理解为是在给定固定时刻系统处于平衡状态时所具有的真实位移状态附近的任意微小变化,即虚位移是真实位移的变分(代表任意微小的变化)。这样表述的好处是,可以将虚位移原理纳入更为广泛的变分原理理论体系。值得注意的是,在虚位移的定义中,强调“固定时刻”,即在该时刻假想将时间“凝固”起来,由此来看虚位移。也就是说,虚位移所对应的变分是等时变分的概念[4]。所以,在图 2(a) 中尽管将虚位移表示为随时间变化的可能位移与真实位移之差,但并不表示虚位移也是随时间连续变化的,应理解为不同时刻的虚位移完全无关,如图 2(b) 所示。也就是说,虚位移不是真实物理状态,与时间历程无关。笔者认为,正确理解这一点很重要。
所以,在分析力学中,虚位移一般都用变分符号 “ δ ” 表示。根据拉格朗日从虚位移原理出发,结合达朗贝尔原理,推导出拉格朗日方程的过程[2,4],即可看出这一点。因为,在最终得出的拉格朗日方程中,系统的动能、势能、非保守广义力等都是真实的。正因为如此,拉格朗日方程可以被纳入哈密尔顿变分原理体系中。 5 关于虚位移原理与虚功原理之间的关系 分析力学中认为虚位移原理与虚功原理是等价的[2,4],即:拉格朗日和阿佩尔关于虚位移原理的表述完全可以作为虚功原理的表述。因为,两者的表述是一致的,其特点都是将虚功定义为质点系所受到的力系在虚位移上所作的虚功。 有观点认为,不能认为虚位移原理与虚功原理完全等价,它们是两个不同的原理;甚至认为,虚位移原理是充分必要性命题,而虚功原理只是必要性命题[7]。对此,笔者的认识是,从虚位移原理与虚功原理的发展历程看,它们之间并无本质不同。事实上,从文献[2]、[8]可看出,将力乘以位移的结果与功联系在一起,最初起源于十九世纪的法国。也就是说,在伯努利和拉格朗日提出虚速度原理的年代,还没有“虚功”这个词,拉格朗日甚至将“力乘以虚位移”称为“虚力矩”(virtual moment);直到 1829 年,才由 CORIOLIS GG 将虚速度原理改称为虚功原理。这表明,虚位移原理与虚功原理是一致的。只不过,今天在分析力学领域,仍以称虚位移原理者居多;而在结构力学、弹性力学等领域,称虚功原理者居多。 另一方面,自从 1864—1874 年间由麦克斯韦 ( MAXWELL ) 和摩尔 ( MOHR ) 分别独立提出虚力原理[1]以来,又有观点认为,虚位移原理与虚功原理不能完全等价。其理由是,功涉及到力和位移两个要素;位移可以是虚位移,力也可以是虚力。虚功既可以定义为力在虚位移上所作的功,也可以定义为虚力在位移上所作的功。所以,虚功原理不能完全等同于虚位移原理。例如,文献[9]认为,虚功原理可以分为虚位移原理和虚力原理两部分。 对此,笔者的认识是,虚功原理是否与虚位移原理完全等价,关键在于虚功的定义。如果虚功只定义为力在虚位移上所作的功,那么就可以认为虚功原理与虚位移原理等价;如果虚功还能定义为虚力在位移上所作的功,则不能认为虚功原理与虚位移原理完全等价。 文献[10]认为,“虚功原理只是最小势能原理的又一种物理解释”。文献[11]针对变形体系证明,从虚位移原理出发,在一定条件下可以导出势能驻值原理;从虚力原理出发,在一定条件下可以导出余能驻值原理。据此文献[11]中说,“为了不引起混淆起见,相应于虚力的虚功,即虚力在真实位移上的功常称为余虚功”。与此对应,又有了余虚功原理的名称[12]。 国内外已有多部弹性力学方面的文献,如文献[11~14],文献[15]等,在叙述能量原理部分时已区分为虚功原理和余虚功原理两条平行的线路,即:(1) 虚功原理/虚位移原理→势能驻值原理→平衡方程→位移解法;(2) 余虚功原理/虚力原理→余能驻值原理→变形协调方程→应力解法。例如,日本学者鹫津久一郎就在文献[12],文献[13]中平行地给出了虚功原理(等价于虚位移原理)和余虚功原理(等价于虚力原理),并认为它们都是连续介质力学中散度定理的特殊情形。 基于此,笔者认为,如果余虚功的提法和概念能够为大家所接受的话,虚位移原理与虚功原理等价、虚力原理与余虚功原理等价,是一种合理的提法。 6 结语 笔者通过对关于虚位移原理的相关文献的研读和对虚位移原理基本理论的进一步分析,重点对虚位移原理表述、虚位移概念、内力虚功概念、虚位移原理充分性证明中的条件、虚位移原理与虚功原理的关系等问题,给出笔者的认识。可归纳如下: (1)早年由伯努利和拉格朗日给出的虚速度原理(即现在所说的虚位移原理)仅陈述一个物理事实,具有“公理”属性,因而可不证明;但阿佩尔的虚位移原理给出了“直接作用力在虚位移上的虚功之和等于零”是系统平衡的“充要条件”的命题,因而需要证明。 (2)在具有“充要条件”命题的虚位移原理中,充分性命题成立的前提条件,不仅需要系统受到双面理想完整定常等约束(以及双面理想非完整齐次约束),而且需要系统原始处于平衡状态。 (3)虚位移原理中的虚位移尽管其基本定义是“系统为约束容许的任意微小位移”,但应理解为是作用在质点系上的力系中各力作用点的虚位移,是一种等时变分的概念,且应认为不同时刻的虚位移完全无关。 (4)当采用外力和内力定义虚位移原理时,可表述为“受双面理想完整定常约束或非完整齐次约束且原处于平衡状态的质点系保持平衡的充要条件是,对于系统的任何虚位移,系统所受外力所作的总虚功 δW外 和内力所作的总虚功 δW内 之和等于零”,即虚功方程可以表达为:δW外 + δW内 = 0。 (5)若不希望受上述虚位移原理表述中充分性命题成立条件的限制,也可仅按其必要性命题表述:“受理想约束的质点系处于平衡状态时,对于系统的任何虚位移,系统所受外力所作的总虚功δW外和内力所作的总虚功 δW内 之和等于零”(δW外 + δW内 = 0)。 (6)基于力在虚位移上作功而定义的虚功原理与虚位移原理是一致的。 致谢:同济大学吴家龙教授、英国曼彻斯特大学伍章健博士、中国农业大学陈奎孚教授等为本文写作提供了无私和热情的帮助,并提出了许多宝贵意见。笔者对此深表感谢! 参考文献 [1]KURRER K E. The history of the theory of structures: from arch analysis to computational mechanics[M]. Berlin: Ernst & Sohn, 2008: 42-44. [2]梅凤翔. 分析力学(上卷)[M]. 北京: 北京理工大学出版社, 2013: 32-44. [3]武际可. 力学史[M]. 2 版. 上海: 上海辞书出版社, 2010: 191-200. [4]朱照宣, 周起钊, 殷金生. 理论力学(下册)[M]. 北京: 北京大学出版社, 1982: 292-305. [5]王光远. 应用分析动力学[M]. 北京: 人民教育出版社, 1981: 28-65. [6]同济大学航空航天与力学学院基础力学教学研究部. 理论力学[M]: 3 版. 上海: 同济大学出版社, 2018: 328-334. [7]王焕定, 章梓茂, 景瑞. 结构力学(Ⅰ, Ⅱ) [M]: 2 版. 北京: 高等教育出版社, 2004: 85-88(Ⅰ), 13-17(Ⅱ). [8]KANDERAKIS N E. When is a physical concept born? The emergence of “Work” as a magnitude of mechanics[J]. Sci & Educ, 2010, 19: 995-1012. DOI: 10.1007/s11191-010-9254-y. [9]ODEN J T. Mechanics of elastic structures[M]. McGraw-Hill Book Company, 1967: 229-266. [10]钱伟长, 葉开沅. 弹性力学[M]. 北京: 科学出版社, 1980: 124-130. [11]杜庆华, 余寿文, 姚振汉. 弹性理论[M]. 北京: 科学出版社, 1986: 321-328. [12]鹫津久一郎. 弹性和塑性力学中的变分法[M]. 老亮, 郝松林, 译. 北京: 科学出版社, 1984: 15-28. [13]鹫津久一郎. 能量原理[M]. 尹泽勇, 江伯南, 译. 北京: 中国建筑工业出版社, 1984: 33-50. [14]阿吉里斯. 能量原理与结构分析[M]. 邵成勋, 译. 北京: 科学出版社, 1978: 22, 44. [15]沈鹏程. 虚功的对偶性原理及其在混杂有限元法中的应用[J]. 上海力学, 1985, 2: 42-57. SHENG P C. Dual principles of virtual work and their application in mixed and hybrid finite element method[J]. Shanghai Mechanics (Chinese Quarterly Mechanics), 1985, 2: 42-57. (in Chinese) 作者简介:王国砚,男,同济大学教授,主要从事结构静动力学教学科研工作,研究方向为结构动力学、结构风工程力学,[email protected]。 引文格式: 王国砚. 关于质点系虚位移原理的若干认识[J]. 物理与工程, 2022, 32(5): 19-24, 33. Cite this article: WANG G Y. Some perspectives to the principle of virtual displacement for particle systems[J]. Physics and Engineering, 2022, 32(5): 19-24, 33. (in Chinese) END
更多精彩文章请点击下面“蓝字”标题查看: 对麦克斯韦方程组拓展的评论王青教授:深入理解“拓展的麦克斯韦方程组”——2.0版王青教授:理解王中林院士“拓展的麦克斯韦方程组”“碰瓷”麦克斯韦:伽利略协变和洛伦兹协变电磁场论趣谈热点:运动介质洛伦兹协变电磁理论2021年《物理与工程》优秀论文、优秀审稿专家、优秀青年学者名单王青教授:源自苏格拉底的问题驱动式教育——在互动中共同学习和成长读后感:教育中的现实和远方王青教授:昨晚(6月9日),清华电动力学期末考试朱邦芬院士:“减负”误区及我国科学教育面临的挑战《物理与工程》2022年第3期目录乐永康:新冠肺炎疫情防控下美国物理实验教学及中美情况对比顾牡:对于重新制定的《非物理类理工学科大学物理课程教学基本要求》的认识和体会朱邦芬院士:从基础科学班到清华学堂物理班朱邦芬院士:对培养一流拔尖创新人才的思考李学潜教授:物理是一种文化李学潜教授:如何帮助物理系学生迈过从高三到大一这个坎穆良柱:物理课程思政教育的核心是科学认知能力培养穆良柱:什么是物理及物理文化?穆良柱:什么是ETA物理认知模型穆良柱:什么是ETA物理教学法吴国祯教授:我的国外研究生经历印象——应清华大学物理系“基科班20年·学堂班10年纪念活动”而写 陈佳洱,赵凯华,王殖东:面向21世纪,急待重建我国的工科物理教育王亚愚教授:清华物理系本科人才培养理念与实践葛惟昆教授:关于中外人才培养的几点思考安宇教授:为什么传统的课堂讲授模式需要改变安宇教授:其实教学就是积累的过程刘玉鑫教授:关于本科生物理基础课程教学和教材编著的一些思考沈乾若:重创理科教育的美加课程改革Henderson C:美国研究基金支持下的物理教育研究及其对高等物理教育的影响《物理与工程》期刊是专注于物理教育教学研究的学术期刊,是中国科技核心期刊,1981年创刊,欢迎踊跃投稿,期刊投审稿采编平台: http://gkwl.cbpt.cnki.net 欢迎关注 《物理与工程》微信公众号 原标题:《关于质点系虚位移原理的若干认识》 |

【本文地址】
今日新闻 |
推荐新闻 |