车辆质量与道路坡度估计 |
您所在的位置:网站首页 › 估算的算法 › 车辆质量与道路坡度估计 |
车辆质量与道路坡度估计
|
在重型货车研发过程中,为了节约传感器成本,就不会安装质量传感器和坡度传感器,而是通过数学公式进行质量估算和坡度估算。工程中常用的方法是扩展卡尔曼滤波和最小二乘法。步骤如下: 1、利用汽车纵向动力学公式:Fx = mgf + 0.5pCdAv^2 + mgθ + m*dv/dt (公式1),能够发现坡度助力mgθ中质量和坡度信号是耦合的,所以需要对两个变量进行解耦。 在重型货车上,线控底盘、L2智能驾驶很多地方会用到X,Y,Z三个方向的加速度,所以车上一般都会装有IMU传感器,其测量的加速度有如下关系: a = gθ + dv/dt (公式2),带入动力学公式后,得到如下公式: m = (Fx - 0.5pCdAv^2)/(a + gf) (公式3) 利用已知的车辆纵向力、车速、加速度信号,就可以先估算出车辆质量。质量几乎是不会变化的,接下来利用扩展卡尔曼滤波估算坡度。 2、估算出质量,且质量变化不大,则默认质量为常量。对纵向动力学公式变型可得:
公式展开为 考虑到公路设计规范,道路坡度一般较小,则sina = i ,(公式5)变为
接下来是扩展卡尔曼算法的实现:选取状态变量为车速、质量、坡度,其中质量和坡度变化小,导数近似为0,则微分方程组为:
利用前向欧拉,如果不懂的话可以理解为y1=y0+Δy*Δt ,得到离散化差分方程:
假设过程噪声为Wk , 测量噪声为Vk,他们是相互独立,均值为零的高斯白噪声(服从正义分布),过程噪声协方差矩阵为Qk,测量噪声协方差矩阵为Rk。常规的状态空间方程表达式为:
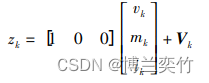
本文中, 其中, 以车速作为观测量,则系统测量方程为:
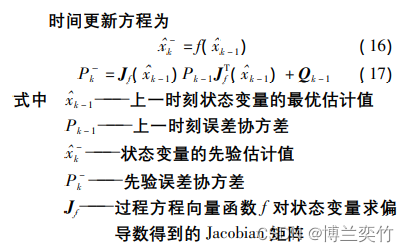
(公式10)与(公式11)组成状态空间表达式: 由(公式12) ,按照 EKF 算法对车辆质量 m、道路 坡度 i 进行估计。EKF 包括两个计算过程: 时间更 新和测量更新。时间更新方程向前推算先验状态估 计值和先验误差协方差; 测量更新方程将先验状态 估计和测量变量结合产生状态的后验估计并更新估 计状态的后验误差协方差。算法递归进行,只需获 得上一时刻状态变量的估计值和当前状态变量的测 量值便可获得当前状态变量的估计值。算法流程如 图 所示
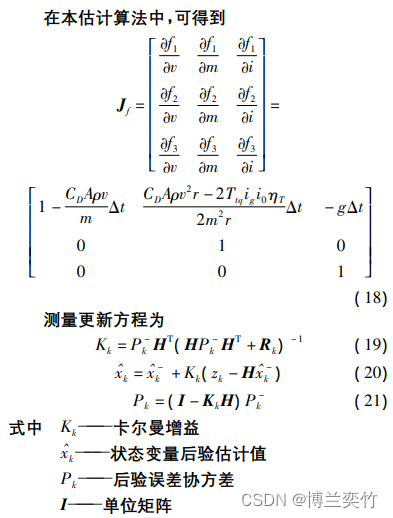
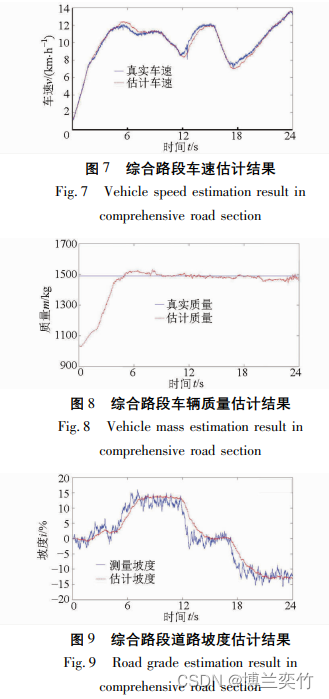
卡尔曼增益根据测量噪声协方差 Rk 以及先验 误差协方 差 Pk 动态调节测量变量 zk 和 其 估 计 Hx^k 的权重。 3、结果展示:
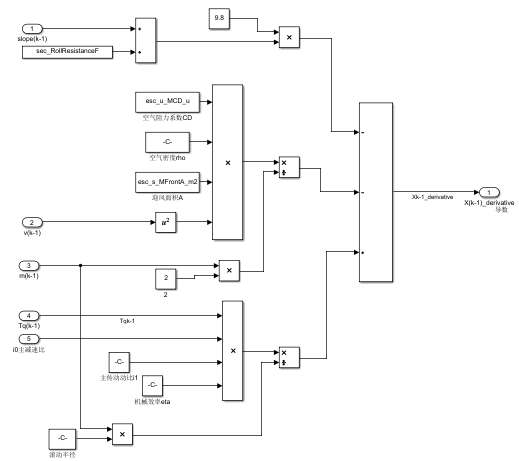
最近好多悠悠找我要模型,本来我是不太愿意给的,毕竟这是劳动成功,但是为了能让更多初学者深刻的学习卡尔曼滤波的过程原理,我还是将模型放上来了。 1、计算速度的导数,与坡度、质量的导数做成矩阵。
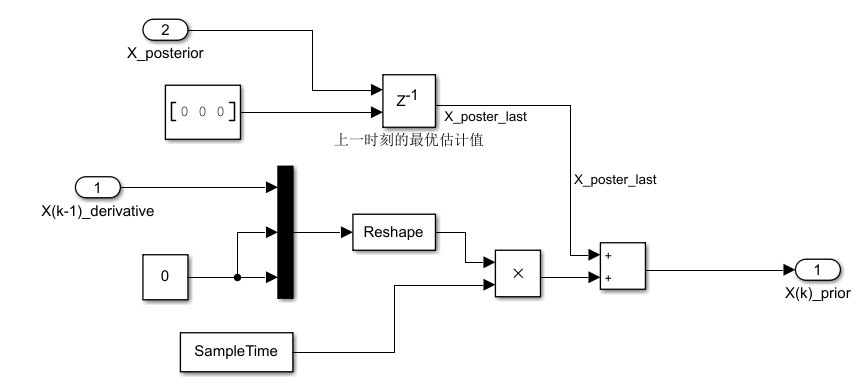
2、计算先验估计值
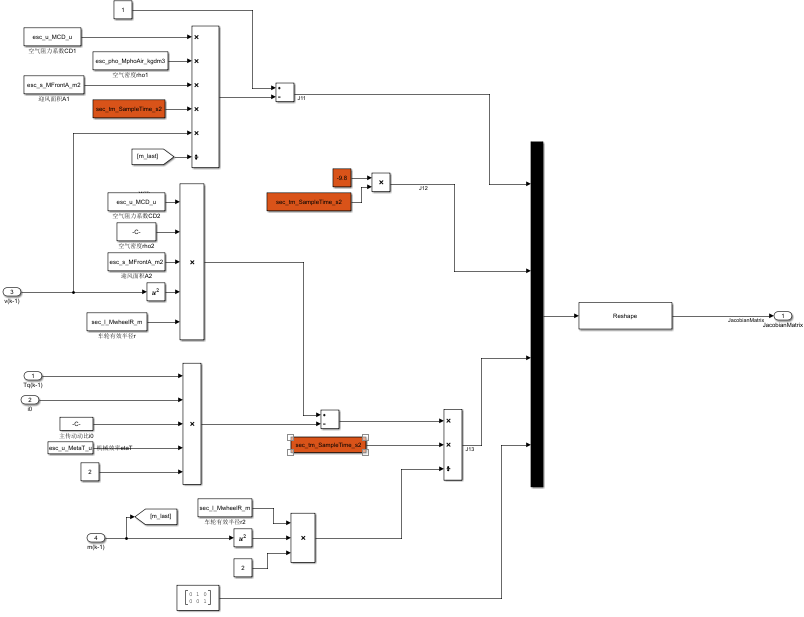
3、计算雅可比矩阵
4、计算先验协方差
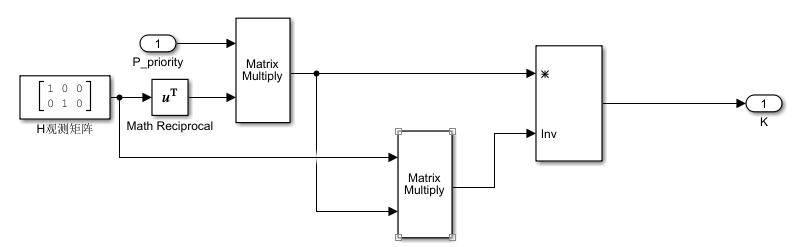
5、计算K增益
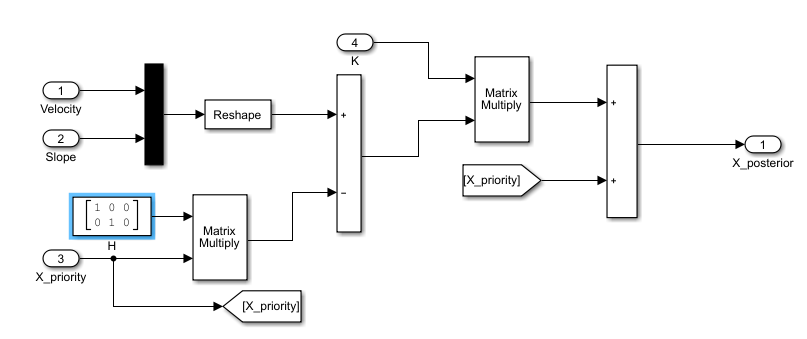
6、计算后验估计值
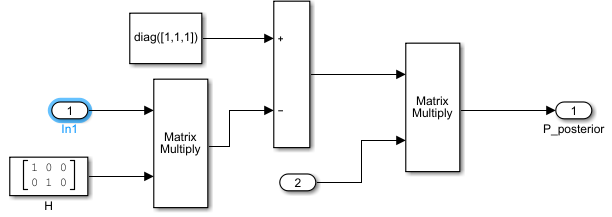
7、计算后验协方差
到此模型就搭完了,可以carsim与simulink联合仿真,看看估算效果辣。 |
 (公式5)
(公式5) (公式6)
(公式6) (公式7)
(公式7)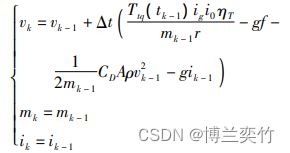 (公式8)
(公式8) 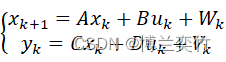 (公式9)
(公式9)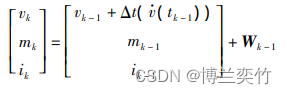 (公式10)
(公式10)
 (公式11)
(公式11) (公式12),式中,H是测量矩阵。
(公式12),式中,H是测量矩阵。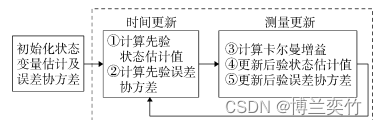

【本文地址】
今日新闻 |
推荐新闻 |