考研复试(控制工程专硕)及大学本科(物联网工程)知识点回顾(二) |
您所在的位置:网站首页 › 伯德图与奈氏图关系 › 考研复试(控制工程专硕)及大学本科(物联网工程)知识点回顾(二) |
考研复试(控制工程专硕)及大学本科(物联网工程)知识点回顾(二)
|
复试所涉及的科目
自动控制原理1、传递函数的极点和零点对输出的影响?2、动态性能指标有哪些?3、常用的稳定判据?4、√ 劳斯判据特殊情况及处理?5、√ 为了减小或消除系统在输入信号和扰动作用下的稳态误差,可采取哪些措施?6、请简述一下绘制常规根轨迹的步骤?如何使用根轨迹判断系统稳定性?7、附加开环零、极点对根轨迹、系统稳定性及动态性能有何影响?8、什么是主导极点?闭环实数主导极点的作用?9、常见的频率特性曲线有哪些?10、如何绘制奈氏图并判断系统稳定性?11、如何绘制伯德图并判断系统的稳定性?12、奈氏图与伯德图的关系?13、频域的稳定裕度包括相角裕度和幅值裕度,如何用稳定裕度对系统进行判断?14、什么是傅里叶变换?他有什么特性?15、√ 什么是拉普拉斯变换?他有什么特性?16、√ 什么是Z变换?有什么特性?常用的Z变换法有哪些?17、Z的反变换有哪些方法?18、离散系统的稳定判据有哪些方法?19、采样器和保持器对离散系统的动态性能有何影响?20、状态空间方程中A/B/C/D分别代表什么?状态空间方程描述了系统的什么?21、建立状态空间表达式有哪些方法?22、线性定常连续系统的可控性判据?23、反馈结构对系统可控性和可观性的影响?24-2526、√ 为什么自动控制系统要采用负反馈?27、举一些生活常用的正负反馈的例子?28、如何判断连续系统的稳定性?29、√√ PID调节中各个环节的作用?30、√ 控制原理的核心?31、√√√ 什么是李雅普诺夫稳定?32、PID英文全称?33、传递函数是什么?34、PID参数意义35、PID若系统震荡怎么办?
总结
笔者从21年2月份开始全面备战考研,断掉了之前的文章更新。现在已经成功通过初试,开始备战复试,现在在这里进行一个总结,每个本篇博客主要总结自控原理,大概准备30左右个问题。
自动控制原理
1、传递函数的极点和零点对输出的影响?
传递函数的极点——就是微分方程的特征根,决定了所描述系统自由运动的模态; 传递函数的零点——并不形成自由运动的模态,但他们却影响各模态在响应中所占比重,因此也影响曲线的形状。 2、动态性能指标有哪些?超调量——最大偏离值与终值的差与终值比的百分数; 延迟时间td——响应曲线第一次到达终值一半所需时间; 上升时间tr——从终值10%上升到90%所需时间,或对于振荡系统为响应第一次上升到终值所需时间。上升时间越短,响应速度越快。 峰值时间tp——响应超过终值到达第一个峰值所需时间; 调节时间ts——响应到达并保持在终值±5%或±2%所需最短时间。 赫尔维兹判据——证明多项式稳定,当且仅当赫尔维兹矩阵的主要子矩阵其行列式性程度数列均为正值; 劳斯判据——充分必要条件:劳斯表中第一列各值为正。如果第一列出现小于零的数值,系统就不稳定,且第一列各系数符号的改变次数代表特征方程的正实部根的数目。必要条件:特征方程各项系数为正。 4、√ 劳斯判据特殊情况及处理?某行第一列为0——将特征方程乘以s+a,a为任意值(将0换成近似0的常数): 某行全为0——用上一行构造辅助方程,并将辅助方程复变量s求导,用所求导数方程取代全零行。 5、√ 为了减小或消除系统在输入信号和扰动作用下的稳态误差,可采取哪些措施?(1) 增大系统开环增益或扰动作用点之前系统的前向通道增益; (2) 在系统的前向通道或主反馈通道设置串联积分环节。 6、请简述一下绘制常规根轨迹的步骤?如何使用根轨迹判断系统稳定性?(1) 绘制根轨迹的零极点分布(起于开环极点,终于开环零点); (2) 确定根轨迹的分支数(开环极点与零点之间最大者); (3) 绘制渐近线(渐近线与实轴夹角、渐近线与实轴的交点); (4) 判断根轨迹所在实轴区域的分布(实轴上极点与零点数之和为奇数); (5) 确定根轨迹的分离点与分离角; (6) 根轨迹的起始角和终止角(当出现共轭零、极点时); (7) 根轨迹与虚轴的交点(当根轨迹与虚轴相交时) ——1.劳斯判据(s1求K,s2项构造辅助方程,再将s=jw带入求w) ——2.直接将s=jw带入,分别令实部虚部为0,求K,w 在s左平面的根轨迹都是稳定的。 在s左半平面增加开环零点——会使得根轨迹图向附加零点方向变形,而且开环零点距离坐标原点的距离越近,影响越强。能够显著的改善系统的稳定性,系统的动态性能也明显得到改善。 增加开环极点——会使得根轨迹右移,不利于系统的稳定性与动态性能。 8、什么是主导极点?闭环实数主导极点的作用?主导极点——在s平面内最靠近虚轴而附近又无闭环零点的一些闭环极点,他们对系统性能影响最大(凡比主导极点实部大3-6倍以上的其他闭环零极点,影响均可忽略); 作用——相当于增大阻尼,使得峰值时间迟后,超调量下降。 9、常见的频率特性曲线有哪些?幅相频率特性曲线(奈氏图 ); 对数频率特性曲线(伯德图 ); 对数幅相曲线(尼克尔斯图 )。 (1) 将s=jw带入传递函数,写成实部加虚部的形式; (2) 由给定传递函数以及w=0的模值条件确定起点; (3) 令实部虚部为零,确定曲线与虚实轴的交点; (4) 由幅角定理绘制奈氏图。 稳定性判据——看取现顺时针包围(-1, j0)点的圈数是否等于开环传输函数中正实部极点数。如果相等,系统稳定;如果不等,系统不稳定。 11、如何绘制伯德图并判断系统的稳定性?(1) 将开环传递函数进行典型环节分解; (2) 确定一阶、二阶环节的交接频率,将其标注于w轴上; (3) 绘制低频段渐进特性曲线 (4) 绘制**w≥W(min)**处渐进特性曲线(交接频率处、斜率发生变化。变化规律取决于典型环节的种类) 稳定性判据——在L(w)>0的区域内,判断曲线穿越(2K+1π)线的次数是都等于开环传递函数的正实部极点数。 12、奈氏图与伯德图的关系?相同——奈氏图与伯德图的本质是相同的,都是依据曲线穿越某个点或者某条线的次数是否等于开环传递函数中正实部极点数。 区别——伯德图是在L(w)>0处的频段内确定穿越次数,而奈氏图是在全频段内进行判断。 13、频域的稳定裕度包括相角裕度和幅值裕度,如何用稳定裕度对系统进行判断?相角裕度——由截止频率和相频特性 求出,对于最小相位系统,相角裕度大于0则系统稳定; 幅值裕度——由穿越频率和幅频特性 求出。 稳定裕度扩展资料 14、什么是傅里叶变换?他有什么特性?定义——傅里叶变换是将满足一定关系的某个函数表示成三角函数或者是他们积分的线性组合; 特性——傅里叶变换满足线性、对偶性、平移性、微分性、卷积定理等。 15、√ 什么是拉普拉斯变换?他有什么特性?定义——拉普拉斯变换是为了在连续函数中简化计算而建立的实变量函数与复变量函数间的一种函数变换; 特性——拉普拉斯变换满足线性、积分性、位移性、初值定理和终值定理等。 (1) Z变换是将实频域信号转换为复频域信号的一种变换; (2) Z变换满足线性、时移性、微分性、卷积定理等; (3) Z变幻的常用方法有级数求和法、部分分式法。 17、Z的反变换有哪些方法?部分分式法、幂级数法、反演积分法。 18、离散系统的稳定判据有哪些方法?(1) w变换(令z=w+1/w-1)与劳斯判据; (2) 朱利判据 采样器——可使系统的峰值时间和调节时间 略有减小,但使超调量 增大,采样造成的信息损失会降低系统的稳定程度; 零阶保持器——使系统的峰值时间和调节时间 都加长,超调量和振动次数 也增加。零阶保持器的相角滞后也降低系统的稳定程度。 20、状态空间方程中A/B/C/D分别代表什么?状态空间方程描述了系统的什么?A——为系统矩阵或状态矩阵或系数矩阵 B——为控制矩阵或输入矩阵 C——为观测矩阵或输出矩阵 D——为前馈矩阵或输入输出矩阵 状态空间方程描述属于对系统的一种完全的描述,能够完全表征系统的所有动力学特性。 21、建立状态空间表达式有哪些方法?(1) 根据系统的机理建立相应的微分方程或差分方程,继而选择有关的物理量作为状态变量,从而导出其状态空间表达式; (2) 由已知系统微分方程建立状态空间表达式; (3) 由系统传递函数建立状态空间表达式。 22、线性定常连续系统的可控性判据?格拉姆矩阵判据、凯莱-哈密顿定理、PBH秩判据。 23、反馈结构对系统可控性和可观性的影响?状态反馈——不改变系统可控性、可能改变系统的可观性; 输出至状态微分反馈——可改变系统的可控性、不改变系统的可观性; 输出至参考输入反馈——同时不改变可控性、可观性。 对一个线性系统,需要判定其可控性或者可观测性,才能对其进行求解。 24-2524、利用状态反馈任意配置闭环极点的充分必要条件 是被控系统可控。 25、利用输出至状态微分的反馈任意配置闭环极点的充分必要条件 是被控系统可观。 26、√ 为什么自动控制系统要采用负反馈?在自动控制系统中,大多数都采用负反馈,因为只有负反馈所形成的闭环回路才能起到调节作用。若采用正反馈,会使得变量的采集信号越来越偏离设定值,只有用负反馈才能控制现场采集的变量值越来越接近设定值。 27、举一些生活常用的正负反馈的例子?正反馈——核反应堆; 负反馈——冰箱、饮水机、电饭锅等。 28、如何判断连续系统的稳定性?一阶、二阶系统——通常采用时域分析法,求其动态及稳态性能指标等判断其稳定性; 三阶以上系统——可采用赫尔维兹判据、劳斯判据、根轨迹、奈氏图、伯德图等判断方法。 29、√√ PID调节中各个环节的作用?比例调节——可以加快系统的调节时间,迅速减小误差,但是过大的比例作用会使得系统的稳定性下降,甚至造成系统的不稳定; 积分环节——主要是为了消除稳态误差,积分作用的强弱取决于积分时间Ti,Ti越小,积分作用越强; 微分调节——能够预见偏差变化的趋势(预测 ),因此能产生超前的控制作用,在偏差还没形成之前就已经被微分调节作用消除。选择合适的微分作用可以减少超调,减少调节时间。因为微分作用对噪声干扰有放大 作用,因此过强的微分作用对系统的抗干扰性不利。 30、√ 控制原理的核心?稳(稳定性)、快(暂态性能)、准(稳态性能),让系统更加稳定,让控制更加准确。 31、√√√ 什么是李雅普诺夫稳定?李雅普诺夫稳定——用S(a)表示状态空间中以原点为球心,以a为半径的一个球域,S(b)表示另一个半径为b的球域。若对于任意选定的每一个域S(a),必然存在一个相应的域S(b),其中b |

 绘制常规根轨迹扩展资料
绘制常规根轨迹扩展资料

 频率特性曲线资料扩展
频率特性曲线资料扩展
 离散系统的稳定判据参考详情
离散系统的稳定判据参考详情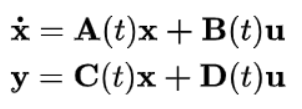
【本文地址】
今日新闻 |
推荐新闻 |