2. 动态系统建模 |
您所在的位置:网站首页 › 传递函数与系统函数的关系 › 2. 动态系统建模 |
2. 动态系统建模
|
1. 拉普拉斯变换
拉普拉斯变换是经典控制理论中的重要数学工具,它可以把一个时域上的函数转换成一个复数域上的函数,从而简化系统的分析难度。 定义 电路系统 其中e(t) 表示电压、i(t)表示电流、L表示电感、R表示电阻紧接着,定义:这个动态系统的输入为电压u(t) = e (t),输出电流为x(t) = i (t),那么上述的公式就变成了: 其中e(t) 表示电压、i(t)表示电流、L表示电感、R表示电阻紧接着,定义:这个动态系统的输入为电压u(t) = e (t),输出电流为x(t) = i (t),那么上述的公式就变成了: 这里系统的输入和输出就是一个卷积运算的关系,用公式表示如下: 这里系统的输入和输出就是一个卷积运算的关系,用公式表示如下: 这样的话,直接求解就是十分的复杂拉普拉斯变换
对于一个函数f(t)做拉普拉斯变化,可以将其从时域(t)上转换到复数域上(s),他的定义为: 这样的话,直接求解就是十分的复杂拉普拉斯变换
对于一个函数f(t)做拉普拉斯变化,可以将其从时域(t)上转换到复数域上(s),他的定义为: 这里的s是一个复数: 这里的s是一个复数:
 拉普拉斯的逆变换 拉普拉斯的逆变换
 2. 传递函数和系统设计
传递函数
2. 传递函数和系统设计
传递函数
传递函数是控制理论的基础。 系统的传递函数的定义是:在零初始状态下,系统输出的拉普拉斯变换与系统输入的拉普拉斯变换之间的比值,即:
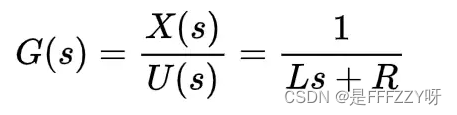
这里的G(s)就是传递函数。 这里我们参照定义那一部分中电流电压之间的关系,我们就可以继续推算: 首先对下面这个式子两边同时做拉普拉斯变换: 可以得到: 可以得到:
 考虑零初始状态,x(0) = 0,那么上述的式子可以优化为: 考虑零初始状态,x(0) = 0,那么上述的式子可以优化为:
 那这样我们就能得到传递函数为: 那这样我们就能得到传递函数为:
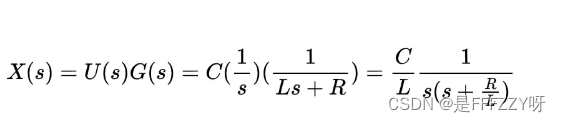
 得到传递函数之后,我们的任务并没有结束,还要继续往下演算,因为传递函数并不是我们最终的目标,我们的最终目标是要得到输出的准确表达式,才能得到我们这个系统的变化,才能更好地分析。当我们输入的是一个常数C,在这个系统中,也就是u(t) = C,那么对应的拉普拉斯变换是: 得到传递函数之后,我们的任务并没有结束,还要继续往下演算,因为传递函数并不是我们最终的目标,我们的最终目标是要得到输出的准确表达式,才能得到我们这个系统的变化,才能更好地分析。当我们输入的是一个常数C,在这个系统中,也就是u(t) = C,那么对应的拉普拉斯变换是:
 那我们再次带入传递函数中,我们可以得到: 那我们再次带入传递函数中,我们可以得到:
 现在得到的输出的拉普拉斯变换,那我们想要进一步进行化简的话,可以使用拉普拉斯的逆变换: 现在得到的输出的拉普拉斯变换,那我们想要进一步进行化简的话,可以使用拉普拉斯的逆变换:
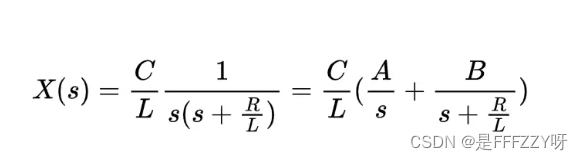 因式分解法再化简一步,求接触A、B的值之后,得到X(s)的值应该是: 因式分解法再化简一步,求接触A、B的值之后,得到X(s)的值应该是: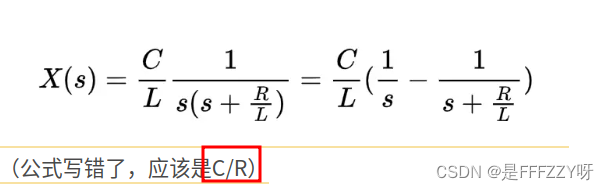 再对等式两边进行拉普拉斯逆变换,这样就能得到系统真正的输出,应为: 再对等式两边进行拉普拉斯逆变换,这样就能得到系统真正的输出,应为:
 这样就得到了最终的输出函数,我们紧接着分析这个函数,我么可以得到,系统的输出将从0开始,并且随着时间,不断地接近一个值C/R。所以,系统的输出是有界的,并且随着时间的增加会趋向于常数C/R。我们同样,在x(t)的拉普拉斯变换中,可以推导出函数的零点,也就是当X(s)的分母等于0的时候,我们就可以得到: 这样就得到了最终的输出函数,我们紧接着分析这个函数,我么可以得到,系统的输出将从0开始,并且随着时间,不断地接近一个值C/R。所以,系统的输出是有界的,并且随着时间的增加会趋向于常数C/R。我们同样,在x(t)的拉普拉斯变换中,可以推导出函数的零点,也就是当X(s)的分母等于0的时候,我们就可以得到:
 sp1、sp2就代表着系统输出的极点,它可以直接通过传递函数的特征方程直接得到。 sp1、sp2就代表着系统输出的极点,它可以直接通过传递函数的特征方程直接得到。
通过以上的分析我们可以得到,在得到系统的传递函数之后,便可以通过简单的代数计算得到系统输出的极点,并且以此为依据快速判断系统的表现。 控制系统传递函数 开环控制系统(Open Loop Control System) 如图所示的是开环控制系统,其中:R(s)是参考值或者也可以叫目标值、C(s)是控制器,G(s)叫做控制系统的开环传递函数。控制量是U(s)也叫原动态系统的输入。控制系统的输出=原动态系统的输出X(s)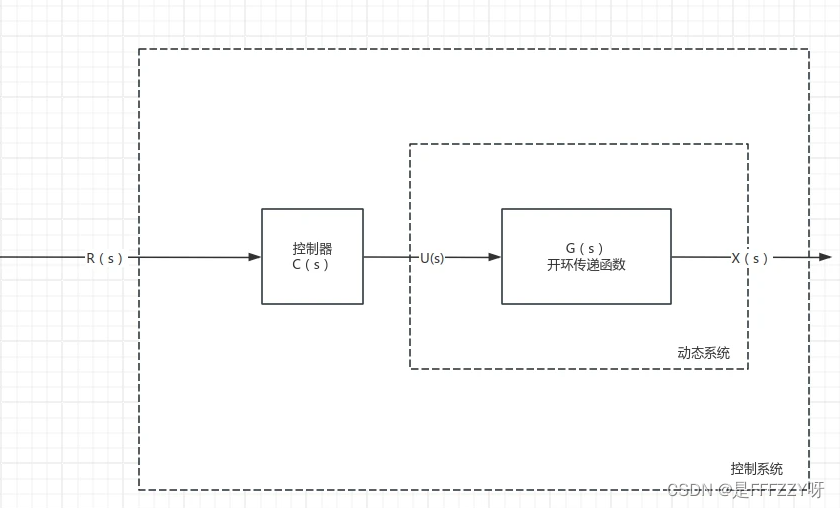 从这个图中我们也可以看出来,控制系统的本质上也是一个动态系统,从参考值R(s)(同时也是控制系统的输入,又称为参考输入)到系统输出X(s)是一个串联的结构,也就是: 从这个图中我们也可以看出来,控制系统的本质上也是一个动态系统,从参考值R(s)(同时也是控制系统的输入,又称为参考输入)到系统输出X(s)是一个串联的结构,也就是:
 我们可以从这个公式中再分析,U(s) =R(s)C(s),这也就是说明输出量X(s)是对与输入量是没有影响的。
闭环控制系统
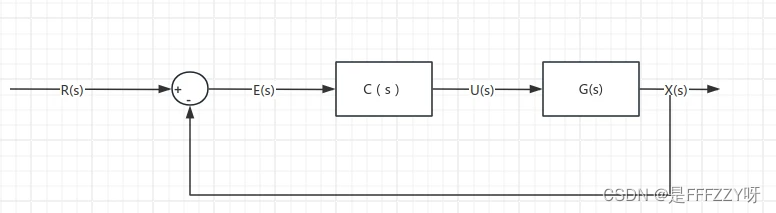
如果我们将输出X(s)反馈到输入端,那么就可以形成一个闭环的控制系统,其中,参考值与输出值之间的差称为误差(Error),E(s) = R(s)-X(s),对应的时间函数是e(t) = r(t) - x(t),控制器将根据误差决定控制量U(s)。 我们可以从这个公式中再分析,U(s) =R(s)C(s),这也就是说明输出量X(s)是对与输入量是没有影响的。
闭环控制系统
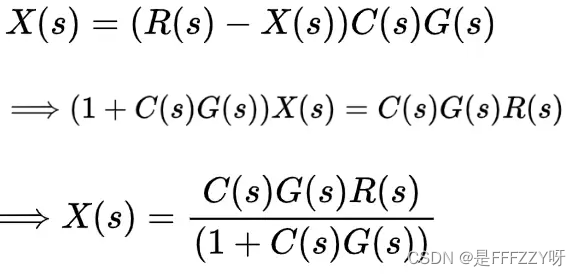
如果我们将输出X(s)反馈到输入端,那么就可以形成一个闭环的控制系统,其中,参考值与输出值之间的差称为误差(Error),E(s) = R(s)-X(s),对应的时间函数是e(t) = r(t) - x(t),控制器将根据误差决定控制量U(s)。
 根据传递函数的代数性质,可得: 根据传递函数的代数性质,可得:
 将E(s) = R(s) - X(s)带入上式中,可得: 将E(s) = R(s) - X(s)带入上式中,可得:
 定义控制系统的闭环传递函数为: 定义控制系统的闭环传递函数为:
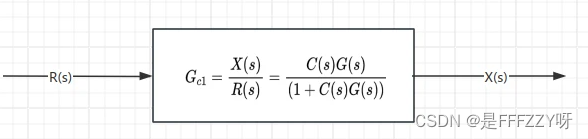
 这样的话,我们就可以得到一个简化后的闭环控制系统框图: 这样的话,我们就可以得到一个简化后的闭环控制系统框图:
|
【本文地址】
今日新闻 |
推荐新闻 |