使用RoboDK对工业机器人与传送带进行动态仿真 |
您所在的位置:网站首页 › 传送带怎么打开 › 使用RoboDK对工业机器人与传送带进行动态仿真 |
使用RoboDK对工业机器人与传送带进行动态仿真
|
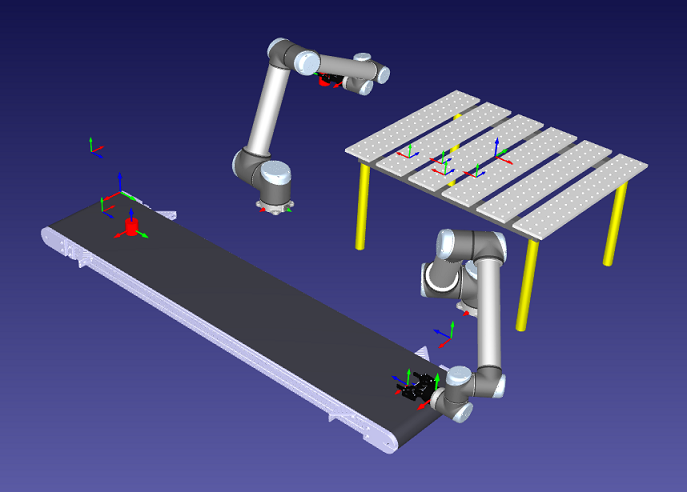
在工业机器人应用中,使用机器人代替人力取放物件是最常见的任务类型之一,这类型的自动化任务经常需要使用到传送带。而给机器人编程时,传送带的动态变量给编程与仿真带来复杂性,因此机器人传送带的仿真往往很有挑战性。今天,我们给出一些建议来帮助用户实现这一任务。 当机器人编程任务中包括动态物体时,将给仿真带来难度。对此,RoboDK给出有用的示范,例如在安装文件夹(C:\RoboDK\Library)中,就有3个传送带的范例供用户学习: Example 02-2 – Pick and place with laser sensor.rdk 激光仪检测取放范例 Example 02-3 – Pick and place with 2D camera.rdk 相机检测取放范例 Example 08 – Conveyor with 2 robots.rdk 传送带与2台机器人范例RoboDK的编程特点 作为一种独特的编程与仿真工具,RoboDK具有下面几个特点。 动态物体作为“机械装置”:在RoboDK中可以添加任意机械装置,例如工业机器人即为拥有6个旋转轴的机械装置。用户可以将传送带添加为1个线性轴的机械装置。 图形界面操作:用户可以通过图形界面的按钮指令给机械装置编程,例如添加线性移动,暂停,设置输入输出I/O等指令。 使用Python语言编程:几乎所有在RoboDK工作站中的个体都可以利用Python实现编程。RoboDK特有的Python应用编程接口(API),让用户在Python程序中调用任意物体(包括机器人),指令,程序等等。传感器也可以通过Python脚本程序仿真。
对传送带仿真的建议 相信用户在了解了上面列举的三个例程之后,都能掌握很多使用RoboDK的编程技巧,在这里我们指出一些以上范例中的要点。 1. 将任务分区处理试图使用同一个界面程序或Python程序来控制所有的仿真区域将是困难的,这会导致整个项目难以控制。在示范中,我们都将整个仿真分为三个部分:取物区,传送区,放置区。这样分别调用各个子程序的处理更加灵活,完成仿真后如需后续修改也更方便。 2. 给每个区域设置参考坐标系当你打开2台机器人与传送带的示范,会看到“设置参考坐标系”这个指令出现很多次(提示:右键点击程序,点选“显示指令”可查看程序内的所有指令)。 每当机器人完成一个动作,我们都转换一次参考坐标系,这是一个很有用的操作。每个区域都有一个独立的参考坐标系可以保证各个几何空间更有效地匹配,未来的修改操作也更容易。 3. 给每个区域设置“原点”同样地,为每个区域设定“原点”位置也很重要。选择一个靠近操作区域又“安全”的位置可以预防机器人碰撞。每次机器人在该区域拾取一个物件后,它可以快速移动至用户设定的“原点”,再进行接下来的工作,这样可以确保机器人动作都在可控范围之内。 4. 设置最大拾取距离在RoboDK中仿真机器人工具(例如:夹爪)的拾取,当机器人接收到“获取”指令时,任何可以被拾取的、并靠近机器人工具的物体会附着在机器人工具上。用户可以在工具菜单–>选项中,设置该拾取动作的最大距离。 5. 利用Python调用物体名编程如果你观察相机检测的仿真范例,视觉传感器是如何检测到每个物体的呢?答案在于RoboDK使用物体的名字来追踪它们。 右键点击Python程序,点选“编辑Python程序”,你可以看到PART_KEYWORD变量被设置为”Part”。这代表所有可被拾取的物体都以这个名字作为前缀,相机只会检测到以”Part”为开头的物体。 6. 速度设置与匹配在传送带仿真中,速度的设置是一个难点。用户需要将传送带的运动速度与机器人运动速度相匹配,这需要根据传送带实际的运动速度,仿真机器人动作与“拾取/放置”所需要的时间,并反复测试,达到理想效果。 最后,机器人取放看起来是很简单与常见的应用,但是机器人与传送带的动态仿真却不简单,所以做好心理准备你的程序可能需要经过不断的测试与修改。 Share on TwitterShare on LinkedinShare on Facebook |
【本文地址】