史上最详细的PID教程 |
您所在的位置:网站首页 › 优化控制模型 › 史上最详细的PID教程 |
史上最详细的PID教程
|
Matlab动态PID仿真及PID知识梳理-云社区-华为云 (huaweicloud.com) 位置式PID与增量式PID区别浅析_Z小旋-CSDN博客_增量式pid https://zhuanlan.zhihu.com/p/38337248
「期望值是什么,与控制器没有关系」,而是与物理对象有关。更直接的原因是因为你使用了这个物理量做反馈而,期望值需要与反馈做差,所以期望值才有了物理意义。「期望值是什么取决于反馈值是什么。」 常用PID算法: ①PI算法:特点: 从时域上看,只要存在偏差,积分就会不停对偏差积累,因此稳态时误差一定为零不足:比例与积分动作都是对过去控制误差进行操作, 不对未来控制误差进行预测,限制了控制性能。PI调节将比列调节的快速反应与积分调节消除静差的特点结合,实现好的调节效果。PI调节适用于控制通道滞后较小、负荷变化不大、 工艺参数不允许有静差的系统。 ②PD算法:适用于舵机快速响应 对于惯性较大的对象,常常希望能加快控制速度, 此时可增加微分作用。 特点: 比例控制对于惯性较大对象,控制过程缓慢,控制品质不佳。比例微分控制可提高控制速度,对惯性较大对象,可改善控制质量,减小偏差,缩短控制时间。理想微分作用持续时间太短, 执行器来不及响应。实际使用中,一般加以惯性延迟,称为实际微分。PD 调节以比例调节为主,微分调节为辅,PD调节是有差调节。PD 调节具有提高系统稳定性、抑制过渡过程最大动态偏差的作用。PD 调节有利于提高系统响应速度。PD 调节抗干扰能力差,一般只能应用于被调参数 变化平稳的生产过程。微分作用太强时,容易造成系统振荡。 ③PID算法:将比例、积分、微分三种调节规律结合在一起, 只要三项作用的强度配合适当,既能快速调节,又能消除余差,可得到满意的控制效果。 特点: PID 控制作用中,比例作用是基础控制;微分作用是 用于加快系统控制速度;积分作用是用于消除静差。 只要比例、积分、微分三种控制规律强度配合适当, 既能快速调节,又能消除余差,可得到满意控制效果。 Kp 较小时,系统对微分和积分环节的引入较为敏感,积分会引起超调,微分可能会引起振荡,而振荡剧烈的时候超调也会增加。 Kp 增大时,积分环节由于滞后产生的超调逐渐减小,此时如果想要继续减少超调可以适当引入微分环节。继续增大 Kp 系统可能会不太稳定,因此在增加 Kp 的同时引入 Kd 减小超调,可以保证在 Kp 不是很大的情况下也能取得较好的稳态特性和动态性能。 Kp 较小时,积分环节不宜过大,Kp 较大时积分环节也不宜过小(否则调节时间会非常地长),当使用分段PID ,在恰当的条件下分离积分,可以取得更好的控制效果。原因在于在稳态误差即将满足要求时,消除了系统的滞后。因此系统超调会明显减少。 增量式PID的优缺点:位置型PID和增量型PID的比较: 位置式需引入初始阀位值,增量式不需要位置式需防积分饱和,增量式不会产生积分饱和只有存在偏差时,增量式才会有输出增量式容易实现从手动到自动的切换位置式PID控制的输出与整个过去的状态有关,用到了误差的累加值;而增量式PID的输出只与当前拍和前两拍的误差有关,因此位置式PID控制的累积误差相对更大;优: ①算式中不需要累加。控制增量Δu(k)的确定仅与最近3次的采样值有关,容易通过加权处理获得比较好的控制效果; ②计算机每次只输出控制增量,即对应执行机构位置的变化量,故机器发生故障时影响范围小、不会严重影响生产过程; ③手动—自动切换时冲击小。当控制从手动向自动切换时,可以作到无扰动切换。 缺: ①需要对控制量进行记忆。 ②存在稳态误差 如果系统总是存在统一的方向偏差,就可能无限累加而进行饱和,极大影响系统性能 所谓积分饱和就是指系统存在一个方向的偏差,PID控制器的输出由于积分作用的不断累加而扩大,从而导致控制器输出不断增大超出正常范围进入饱和区。当系统出现反响的偏差时,需要首先从饱和区退出,而不能对反向的偏差进行快速的响应。 为了解决积分饱和的问题,人们引入了抗积分饱和的PID算法。所谓抗积分饱和算法,其思路是在计算U(k)的时候,先判断上一时刻的控制量U(k-1)是否已经超出了限制范围。若U(k-1)>Umax,则只累加负偏差;若U(k-1)0,那我们就希望能有个向前的正速度,去缩小这个误差,当误差为0时,我们希望速度为0。满足这样的过程的速度变化曲线,就是**「合适的速度变化曲线」**。 想想开车的时候,快到终点的时候会出现什么操作? 新手在没达位置的时候,希望有一个比较快的速度,快到了直接一脚刹车踩到底。 高手可以提前预判,匀速降低速度。 更高阶的可以变化的减速让整个速度变化如丝般顺滑。 就有了下面的曲线。 (第一个曲线是实际中是做不到的,因为速度减小需要过程,不能突变)
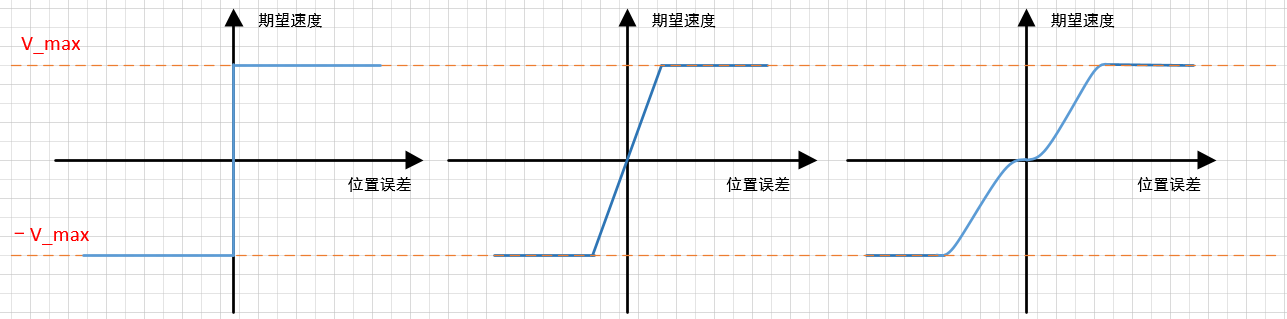
因为我们对期望速度的要求**「期望速度必须能减小位置误差,且位置误差为0时,期望速度为0。「所以我们发现这些期望速度都是」与位置误差相关的且经过0点的曲线」**。 位置误差与期望速度在这时候才建立起的关系,注意,强调一遍,是我们主动把位置误差与期望速度联系起来的,起因是我们希望控制速度达到控制位置的效果。 而这种控制能够被实现的本质是,「速度与位置存在我们已知的简单变化关系,即速度的积分是位置」,所以改变期望速度才能改变位置,才能减小误差。
所以合理的控制过程应该就可以设计成这样。 只要找个合适的函数,根据误差生成合适的期望速度曲线就可以了。 我们最常使用的是什么样的曲线呢?
是不是非常熟悉。 因为这两个曲线满足**「合适的期望速度」**的要求,同时也非常的简单。
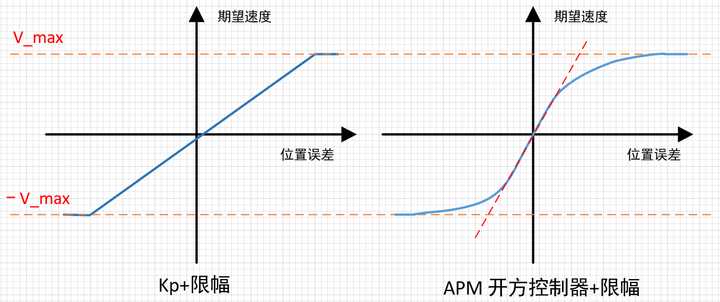
只要是满足**「合适的期望速度」**的曲线都可以作为期望速度,显然如果在外环使用PID也是可以的,但是为什么实际中不这么用呢?因为添加积分(I)后,导致响应变慢,添加微分(D)容易引入噪声,只用P又简单又有效,何乐而不为呢? 到这里外环的输出终于理所应当的变成了内环的期望,但是这并不是因为这件事本就应该成立,而是通过你的设计,和真实存在的物理关系,才设计出来的合情合理的双闭环控制器。 我们再回忆一下这个控制器的设计过程 「1.执行器输出无法直接控制目标物理量。」 「2.发现控制器能控制物理量的变化量(微分)。」 「3.你想了个办法,可以通过控制物理量的微分,按照某种曲线变化,从而达到间接控制目标物理量。」 「4.这个曲线必须满足两点,存在目标物理量误差的时候,应该产生因一个能减小这个误差的变化,且当没有误差的时候,变化量也应该为0。」 「5.选择最简单实用的曲线即可,所以外环选择KP。」 「6.间接控制能成功的原因是因为,执行器能改变的量,与目标物理量之间有简单的物理关系。」 所以为什么外环的输入是内环的期望呢?因为你在设计控制器的时候,内环的目的就是实现用执行器控制直接能改变的变化量,外环的目的就是找到合适的曲线,来引导目标的微分变化,从而达到间接控制的效果。 |





【本文地址】
今日新闻 |
推荐新闻 |