钢铁侠科技行业观察,仿人机器人之Romeo(一) |
您所在的位置:网站首页 › 仿人机器人价格 › 钢铁侠科技行业观察,仿人机器人之Romeo(一) |
钢铁侠科技行业观察,仿人机器人之Romeo(一)
|
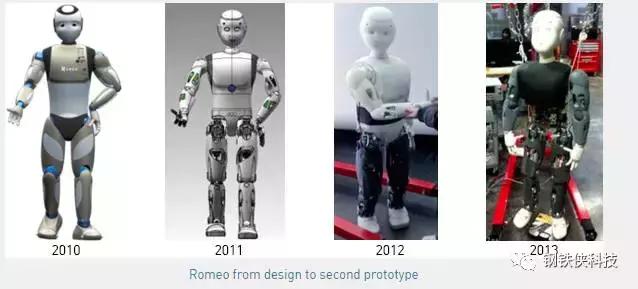
Romeo第二代在第一代上做了很多改进,包括改变脊柱,把电子元器件放到头部,并且融入了摸头杀功能。
提升腿部控制,加入电池。 针对眼睛,LPPA为其实现了可移动的双眼,植入了前庭系统(vestibular system)用来稳定机器人的视觉图像。这样就可以实现更为稳定的动态步态算法。在这方面,国内亦有不错的成果,比如张晓林博士为新松做的一款动态眼(如图),不过依旧还未见到把动态视觉和动态步态结合起来并且公开的产品或者原型。
对于语音,Remeo在Telecom Paris Tech的帮助下可谓是“大费周章”(对于大多仿人机器人的研究者来说,在语音上下了这么多功夫,有点夸张),使用16路的语音天线实现。
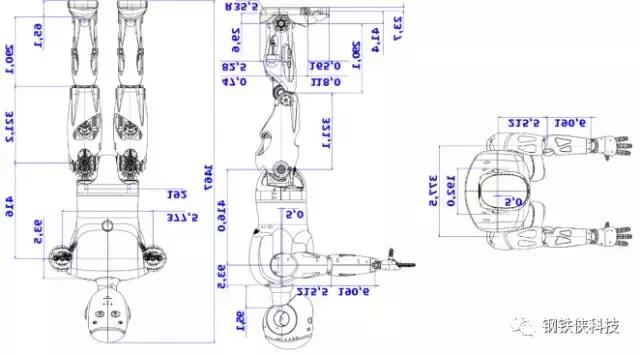
运动控制方面 LAAS致力于实现全身的平衡控制,在基于LPPA所制作的控制图表功能(NAO也使用同样的工具,可以参考它的软件以及视频)上,提出了中心(这是个医学名词,眼中心)控制(oculocentric control framework)这个架构,可以获得高质量的被动步态模式。除此之外,在复杂行为上也有不俗的斩获,比如开门,握手,寻找座椅并成功落座,视觉引导行走等一系列研究。LPPA同期也在进行神经网络应用于双足行走的研究。 最后Romeo在行为,对话,感情研究上也投入了不少的精力。这方面在AI层面,较为独立。 基本参数 · Weight: 36.66 kg · Height: 1.467 m · Degrees of Freedom: 33 + 4(眼睛) 设计信息 Romeo的设计信息多为机械信息,从官方文档可得。其中包含了电机参数(型号,力矩),机械参数(各肢体细节,质心转动惯量),关节参数(转动范围)。
这些参数对于使用者和其他设计者来说都是不小的财富,有助于参照其进行自己的初始设计。其电机则全部采用了Maxon的电机。 事件 1. 2012年末, 第一代完成 2. 2016年, 第二代完成
亮点功能 1. Romeo由于广泛的合作方式,在机器人上验证了仿人机器人相关非常丰富的功能。又因为是由公司产品,定位于家庭,医疗等场景,因此人机交互,安全性,稳定性,类人方面做了非常多的工作。 在这方面,只有同为日本(收购也算)的Asmio有一拼之力。 2. 实现远程操作的功能,虽然设计距离很远,但是只能在实验室实用。 3. 从NAO继承了丰富的软件功能,比如NAO-QI,这一点基本可以傲视群雄,唯一遗憾的是不与较为主流的ROS相兼容,自成一派。 小结 Romeo由定位于民用,每4年为一个项目周期,不光在运动控制(行走,抓起等),也在AI方面,协作互动方面投了不少资源。 与科研机构的广泛合作,为仿人机器人的发展提供了大量的科研成果,实为可敬。 文/钢铁侠科技 孙骁返回搜狐,查看更多 |



【本文地址】
今日新闻 |
推荐新闻 |