现代控制理论3 |
您所在的位置:网站首页 › 什么叫非线性系统的概念 › 现代控制理论3 |
现代控制理论3
|
注:本文是在MOOC平台上学习西北工业大学《现代控制理论基础》(郭建国、赵斌、郭宗易)的课程进行随笔记录与整理 一.系统动态方程的建立列式要求: 1.选择可以测量的物理量作为状态变量 2.根据元件遵循的定律列写方程 常用例子:电路图、牛二定律系统 想直观表达动态方程的变量关系——状态变量图 将状态方程中每个一阶微分方程用图解表示 每个一阶微分方程右端各项之和构成状态变量的导数,经积分可得该状态变量 组成:仅包含积分器、加法器、臂力器 好处:便于计算机系统进行仿真 步骤:先画积分器,确定积分器两端的量 再根据等式关系,进行连接 基于传函方框图的动态方程系统传递函数方框图:
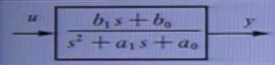
第一种:利用s`=s^2+a1s=s(s+a1) x1`=-a1x1+x2 x2`=-a0x1+u y=x1 第二种:需要上下同时除以s^2进行构造 x2`=-a0x1-a1x2+u y=b0x1+b1x2 另外:某传函分子分母阶次一致,需要提出常数构造并联: 1**.能控规范形的动态方程:** 2.能观测规范形的动态方程: 此时有:x1`=λ1x1+u x2`=λ2x2+u … xn`=λnxn+u y=c1x1+c2x2+…cnxn其矩阵形式为:
|
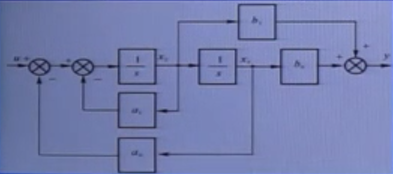
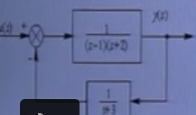 系统状态变量图:
系统状态变量图: 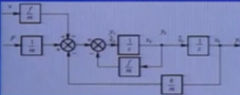 相比而言,状态变量图更能体现系统内部之间的关系,状态变量图可以直接写成系统动态方程 因此,有时需要将系统方框图化为状态变量图 依据:实数域下,一个n阶的传递函数可以分解为最低一阶或二阶传递函数的求和
相比而言,状态变量图更能体现系统内部之间的关系,状态变量图可以直接写成系统动态方程 因此,有时需要将系统方框图化为状态变量图 依据:实数域下,一个n阶的传递函数可以分解为最低一阶或二阶传递函数的求和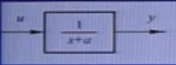 化为:
化为: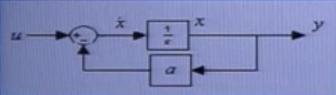 系统动态方程: x`=-ax+u y=x
系统动态方程: x`=-ax+u y=x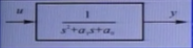 得到包含一个一阶系统的结构图:
得到包含一个一阶系统的结构图: 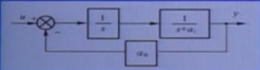 最后化为:
最后化为: 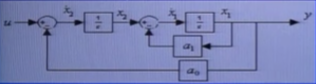
 x1`=x2
x1`=x2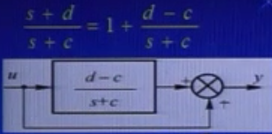 注意: 1.选取不同状态变量,会得到不同状态方程 2.一阶、二阶系统中常有常值增益,其位置也会影响到动态方程 3.二阶转化方法不同(串联不分前后),动态方程也会不同 4.反馈回路的方向和正向回路的方向不同
注意: 1.选取不同状态变量,会得到不同状态方程 2.一阶、二阶系统中常有常值增益,其位置也会影响到动态方程 3.二阶转化方法不同(串联不分前后),动态方程也会不同 4.反馈回路的方向和正向回路的方向不同
 3.对偶关系 能控规范形与能观测规范形之间存在的对偶关系 设能控规范形矩阵的下标为c 设能观测规范形矩阵的下标为o
3.对偶关系 能控规范形与能观测规范形之间存在的对偶关系 设能控规范形矩阵的下标为c 设能观测规范形矩阵的下标为o  例:
例:  4.对角规范形: 条件:D(s)=(s-λ1)(s-λ2)…(s-λn) 即:G(s)可以分解为若干 c/(s-λ) 的和
4.对角规范形: 条件:D(s)=(s-λ1)(s-λ2)…(s-λn) 即:G(s)可以分解为若干 c/(s-λ) 的和 说明: 1.在可以化为对角规范形的基础上如果还有相同实极点时,还可以化约当形 2.当G(s)分子分母幂次相同时,应用除法进行化简,提出常数,再应用前面的知识
说明: 1.在可以化为对角规范形的基础上如果还有相同实极点时,还可以化约当形 2.当G(s)分子分母幂次相同时,应用除法进行化简,提出常数,再应用前面的知识【本文地址】
今日新闻 |
推荐新闻 |