【交通规划原理】第八章 |
您所在的位置:网站首页 › 交通规划概述 › 【交通规划原理】第八章 |
【交通规划原理】第八章
|
文章目录
引言一、交通流分配理论的产生与发展二、交通流分配中的基本概念2.1 交通流分配2.2 交通阻抗2.3 交通平衡问题
三、非平衡分配方法3.1 全有全无分配方法3.2 增量分配法3.3 迭代加权法
四、平衡分配方法4.1 用户平衡分配模型及其求解算法4.2 系统最优分配模型及其求解算法
五、随机分配方法5.1 用户平衡和随机用户平衡5.2 非平衡随机分配方法5.3 随机平衡分配方法
六、动态交通流分配6.1 动态交通流的解析6.1 动态交通流分配的基本概念
引言
最优化理论、图论、计算机技术的发展,为交通流分配模型和算法的研究及开发提供了坚实的基础,通过几十年的发展,交通流分配是交通规划诸问题中被国内外学者研究得最深入、取得研究成果最多的部分。本章主要讲述交通流分配的基本概念、基本原理和基本方法,交通流分配的非平衡分配、平衡分配的模型和算法等内容。 大纲的要求:掌握概念和内涵,理解掌握概念和内涵,理解Wardrop第一、第二原理,非平衡模型和平衡模型。分配结果服务水平评价指标。 一、交通流分配理论的产生与发展城市交通网络上形成的交通流量分布是两种机制相互作用直至平衡的结果。一种机制是:系统用户即各种车辆试图通过在网络上选择最佳行驶路线来达到自身出行费用最小的目标;另一种机制是:路网提供给用户的服务水平与系统被使用的情况密切相关,道路上的车流量越大,用户遇到的阻力即对应的行驶阻抗越高。 两种机制的交互作用使人们不易找到出行的最佳行驶路线和最终形成的流量分布结果。用一定的模型来描述这两种机制及其相互作用,并了解网络上交通流量在平衡状态下的合理分布,即是所说的交通流分配。 概括而言,交通流分配,就是将预测得出的 OD 交通量,根据已知的道路网描述,按照一定的规则符合实际地分配到路网中的各条道路上去,进而求出路网中各路段的交通流量、所产生的 OD 费用矩阵,并据此对城市交通网络的使用状况做出分析和评价。 人们当初进行交通流分配的研究时,多采用全有全无 (All-or-Nothing) 的最短路径法,该方法处理的是非常理想化的城市交通网络,即假设网络上没有交通拥挤,路阻是固定不变的,一个 OD 对间的流量都分配在“一条径路”上,即最短径路上。随着实际应用和理论研究得深入,研究人员发现该最短路径方法对于城市之间的非拥挤公路网的规划设计过程中的交通流分配是比较合适的,但对于既有的城市内部拥挤的交通网络,该方法的结果与网络实际情况出入甚大。 实际网络中,路网上存在着较严重的拥挤,路阻是随着交通流量的增加而递增的,出行的流量会在“多条径路”中权衡选择。所以在 1952 年,著名交通问题专家 Wardrop 提出了网络平衡分配的第一、第二定理,人们开始采用系统分析方法和平衡分析方法来研究交通拥挤时的交通流分配,带来了交通流分配理论的一次大的飞越。 首先,人们进行了确定性的分配研究,其前提是假设出行者能够精确计算出每条径路的阻抗,从而能作出完全正确的选择决定,且每个出行者的计算能力和水平是相同的。可见确定性分配反映了网络的拥挤特性,反映了路阻随流量变化的实际,该方法是第一次理论的进步。 但是,进一步研究网络中的出行者出行行为发现,现实中出行者对路段阻抗的掌握只能是估计而得。因为出行者的计算能力和水平是各异的,对同一路段不同出行者的估计值不会完全相同。 所以,在 1977 年,美国加州大学伯克利分校的 Daganzo 教授及麻省理工学院的 Sheffi 教授提出了随机性分配的理论,其前提是认为出行者对路段阻抗的估计值与实际值之间的差别是一个随机变量,出行者会在“多条径路”中选择,同一起讫点的流量会通过不同的径路到达目的地。随机性分配理论和方法的提出,在拟合、反映现实交通网络实际的进程中又推进了一大步。 然而,1990 年代以来,随着道路交通拥挤的进一步加重和拥挤在时间和空间范围上的扩大以及智能交通系统 (ITS) 研究得进展,人们由注意新路网的规划设计逐步转向重视既有路网的管理控制的进程中,更加意识到:路网上的拥挤性、路径选择的随机性、交通需求的动态性是同时存在并交互作用的,其机理是纷繁复杂的。 确定性分配能较好地反映网络的拥挤性,随机性分配能够较好地反映出行选择行为的随机性,但是要真正地符合路网实际情况,还更重要更基本的交通需求的时变性需要反映出来。 二、交通流分配中的基本概念 2.1 交通流分配如下图所示,交通流分配,就是将预测出的交通小区 i i i 和交通小区 j j j 之间的分布 (或 OD) 交通量 q i j q_{ij} qij ,根据已知的路网描述,按照一定的规则符合实际地分配到路网中的各条道路上去,进而求出路网中各路段 a a a 的交通流量 x a x_a xa。一般的道路网中,两点之间 (即 O 与 D 之间) 有很多条道路,如何将 OD 交通量正确合理地分配到 O 与 D 之间的各条道路上即是交通流分配要解决的问题。
具体而言,交通流分配涉及到以下几个方面: (1)将现状 OD 交通量分配到现状交通网络上,以分析目前交通网络的运行状况,如果有些路段的交通量观测值,还可以将这些观测值在与相应路段的分配结果进行比较,以检验模型的精度。 (2)将规划年 OD 交通量预测值分配到现状交通网络上,以发现对规划年的交通需求而言,现状交通网络的缺陷,为交通网络的规划设计提供依据。 (3)将规划年 OD 交通量预测值分配到规划交通网络上,以评价交通网络规划方案的合理性。 进行交通流分配时所需要的基本数据有: (1)表示需求的 OD 交通量。在拥挤的城市道路网中通常采用高峰期 OD 交通量,在城市间公路网中通常采用年平均日交通量 (AADT) 的 OD 交通量。 (2)路网定义,即路段及交叉口特征和属性数据,同时还包括其时间——流量函数。 (3)径路选择原则。就交通流分配的特点来说,交通工具的运行线路可以分为两类,即线路固定类型和线路不固定类型。对于前者,虽然交通工具的线路是限定的,但作为个体的旅客来说,如果某两点之间有多条线路或多种交通工具,他可以选择不同线路上的交通工具。因此,如果将旅客看作是交通元的话,这仍然是一个自由选择运行行路的问题,只不过这时的径路意义更广泛些,其中径路选择包含对交通工具的选择。 对于城市道路网来说,需要特别指出三点: 由于道路的主要承载对象是车辆,交通流分配中的出行分布量一般是指机动车,以标准小汽车 (Passenger Count Unit, PCU) 为单位。交通需求预测的第一步是预测发生量与吸引量,这个预测值一般是以“人”为单位的,经过方式划分,将以人为单位的出行量转化成了以车为单位的出行量。由于公共电汽车是按固定路线行驶的,不能自由选择行驶路径,故交通流分配不包括这部分车辆,交通流分配的对象只是走行路线不固定的机动车辆的分布量。本章所讨论的方法也适用于人员对固定线路的公共交通径路和工具的选择。 2.2 交通阻抗交通阻抗 (或者称为路阻) 是交通流分配中经常提到的概念,也是一项重要指标,它直接影响到交通流径路的选择和流量的分配。道路阻抗在交通流分配中可以通过路阻函数来描述,所谓路阻函数是指路段行驶时间与路段交通负荷,交叉口延误与交叉口负荷之间的关系。在具体分配过程中,由路段行驶时间及交叉口延误共同组成出行交通阻抗。 交通网络上的路阻,应包含反映交通时间、交通安全、交通成本、舒适程度、便捷性和准时性等等许多因素。根据这些因素建立一个科学严密、解释性强的函数模型是非常困难的。经过大量的理论分析和工程实践,人们得出影响路阻的主要因素是时间,因此交通时间常常被作为计量路阻的主要标准,主要基于以下原因: 理论研究和实际观测表明,交通时间是出行者所考虑的首要因素,尤其在城市道路交通中;几乎所有的影响路阻的其他因素都与交通时间密切相关,且呈现出于交通时间相同的变化趋势;交通时间比其他因素更易于测量,即使有必要考虑到其他因素,也常常是将其转换为时间来度量。1. 路段阻抗 在诸多交通阻抗因素中,时间因素是最主要的。对于单种交通网络,出行者在进行径路选择时,一般都是以时间最短为目标。有些交通网络,路段上的行驶时间与距离成正比,与路段上的流量无关,如城市轨道交通网。有些交通网络,如公路网、城市道路网,路段上的行驶时间与距离不一定成正比,而与路段上的交通流量有关,此时就选用时间作为阻抗。这类行驶时间与距离、流量的关系比较复杂,这种关系可以广义地表达为: C a = f ( { V } ) C_a=f(\{V\}) Ca=f({V}) 即路段 a a a 上的费用 C a C_a Ca 不仅仅是本身流量的函数,而且是整个路网上流量的函数。这个一般化的公式在城市道路网上是比较多见的。因为交叉口的存在,不同路段上的流量会相互影响。对于公路网而言,由于路段比较长,这一关系可以进一步简化,因为大部分时间是花费在路段上又不是在交叉口上,这时上式可以写成: C a = f ( V a ) C_a=f(V_a) Ca=f(Va) 即路段的费用只与该路段的流量及其特性相关,这个假定简化了对路段函数的建立和标定,以及交通流分配模型的开发。 对于公路行驶时间函数的研究,既有通过实测数据进行回归分析的,也有进行理论研究得。其中被广泛应用的是由美国道路局 (Bureau of Public Road, BPR) 开发的函数,被称为 BPR 函数,形式为: t a = t 0 [ 1 + α ( q a c a ) β ] t_a=t_0\big[1+\alpha(\frac{q_a}{c_a})^\beta\big] ta=t0[1+α(caqa)β] 式中, t a t_a ta 是路段 a a a 上的阻抗; t 0 t_0 t0 是零流阻抗; q a q_a qa 是路段 a a a 上的交通量; c a c_a ca 是路段 a a a 的实际通过能力; α , β \alpha,\beta α,β 是阻滞系数,可取 α = 0.15 , β = 4 \alpha=0.15,\beta=4 α=0.15,β=4,也可由实际数据回归分析求得。 从交通流分配的观点出发,理想的路段阻抗函数应该具备下列的性质: 真实性,用它计算出来的行驶时间应该具有足够的真实性。函数应该是递增的,流量增大时,行驶时间不应减少。函数应是连续可微的。函数应该允许一定的“超载”,即当流量等于或超过通行能力时,行驶时间不应无穷大。2. 节点阻抗 节点阻抗是指车辆在交通网络节点处主要指在交叉口处的阻抗。交叉口阻抗与交叉口的形式、信号控制系统的配时、交叉口的通过能力等因素有关。在城市交通网络的实际出行时间中,除路段行驶时间外,交叉口延误占有较大的比重,特别是在交通高峰期间,交叉口拥挤阻塞比较严重时,交叉口延误可能超过路段行驶时间。 交通工程学中,对信号交叉口的延误有过大量的研究,直接目的是为信号交叉口的配时,点控、线控和面控系统的设计以及交叉口通过能力的计算而进行的。节点处的阻抗可分为两类: (1)不分流向类:在某个节点各流向的阻抗基本相同,或者没有明显的规律性的分流向差别。对这类问题比较好处理,用一个统一的 D i D_i Di 表示车辆在节点 i i i 的延误。 (2)分流向类:不同流向的阻抗不同,且一般服从某种规律。城市道路网就是如此,车辆在城市道路的交叉口一般有三个流向:直行、左转、右转,所延误的时间差别明显,且一般服从规律:右转 < 直行 < 左转。 其实,车辆在公路网的节点处也存在统一的延误规律,但是公路网的路段长,车辆在节点处的延误相对于路段上的行驶时间非常小,可以近似视为 0,这样就可以将之归于上述的“不分流向类”对待。但是城市道路网交叉口密集,必须分流向计算。一般用 D i j D_{ij} Dij 表示来自节点 i i i 的车辆在交叉口 j j j 的延误。 1958 年英国 TRRL (Transport and Road Research Laboratory) 研究所的 F. V. Webster 等人根据排队论理论,提出了一个计算交叉口延误的模型。该模型主要包括两部分,一部分是车辆到达率为固定均值时产生的正常相位延误及均匀延误,另一部分是车辆到达率随机波动时所产生的附加延误。 人们在实践应用 Webster 延误公式中发现,当进口饱和度较小,该公式计算结果比较合理,但是当进口饱和度较大时,求得的延误趋向无穷大,求得的延误越不正确,更无法计算过饱和情况下的延误。一般认为 Webster 公式的适用范围为饱和度 X X X 的取值在 0~0.67 之间,即当 0 ≤ X ≤ 0.67 0\leq X\leq 0.67 0≤X≤0.67 时,Webster 公式计算的结果才是合适的。 Webster 公式的提出,对交叉口延误的计算起到了很大的推动作用,但是由于该模型在饱和度上的局限,使得该模型很难直接应用于拥挤的交通网络,即饱和度较大的网络。所以在实际应用中,许多理论研究者或交通工程师对该模型进行了不同的修正,可参阅美国的《道路通行能力手册》。 根据 Webster 公式求得延误,但是问题并没有解决。因为延误公式是针对各个不同的进口道的,更准确地说,是针对不同流向的,车辆从 i i i 点经过 j j j 点后流向不同的节点会有不同的延误,因此用一个 D i j D_{ij} Dij 不能刻画这些延误。 问题的关键是在于目前图论等应用数学中很难有合理、适用的关于节点方位和径路走向的数学描述,因而在求最短径路的算法中就不能一般地表达不同流向车辆在交叉口的不同延误。这个问题一直没能得到很好的解决,因此已有的城市道路交通流分配理论一直忽略节点阻抗的问题,只用 BPR 函数作为阻抗,且只计算路段上的阻抗。 2.3 交通平衡问题(一)Wardrop 平衡原理 如果两点之间有很多条道路而这两点之间的交通量又很少的话,行驶车辆显然会沿着最短的道路行走。随着交通量的增加,最短径路上的交通流量也会随之增加。增加到一定程度后,这条最短径路的行驶时间会因为拥挤或堵塞变长,不再是最短的那一条径路。这时会有车辆选择新的最短径路通行。随着两点之间的交通量继续增加,最短径路会不断改变,两点之间的所有道路都有可能被利用。 如果所有的道路使用者都准确地知道各条道路所需的行驶时间并选择行驶时间最短的道路,最终两点之间被利用的各条道路的行驶时间会相等。没有被利用的道路的行驶时间会更长。这种状态被称之为道路网的平衡状态。 在交通流分配中,一个实际路网上一般有很多个 OD 对,每个 OD 对之间的各条径路都是由很多路段组成,这些路段又可排列组合成无数条不同的径路,这样每个 OD 对间都有多条径路。而且多个 OD 对之间的径路又互相重叠。由于这些原因,使得实际道路网的平衡远远比上述描述要复杂。正是由于这种复杂性,人们一直探索能够严密定义这种平衡并能进行数学表示的途径。 1952 年著名学者 Wardrop 提出了交通网络平衡定义的第一原理和第二原理,奠定了交通流分配的基础。 Wardrop 提出的第一原理定义是:在道路利用者都确切知道网络的交通状态并试图选择最短径路时,网络将会达到平衡状态。在考虑拥挤对行驶时间影响的网络中,当网络达到平衡状态时,每个 OD 对的各条被使用的径路具有相等且最小的行驶时间;没有被使用的径路的行驶时间大于或等于最小行驶时间。 这条定义通常简称为 Wardrop 平衡,在实际交通流分配中也称为用户均衡 (User Equilibrium, UE) 或用户最优。容易看出,没有达到平衡状态时,至少会有一些道路使用者将通过变换线路来缩短行驶时间直至平衡。所以说,网络拥挤的存在,是平衡的形成条件。 Wardrop 提出的第二原理是:系统平衡条件下,拥挤的路网上交通流应该按照平均或总的出行成本最小为依据来分配。此原理也被称为系统最优原理 (System Optimization, SO) 。 与第一原理相比,第二原理是一个设计原理。第一原理主要是建立每个道路利用者使其自身出行成本最小化的模型,而第二原理是旨在使交通流在最小出行成本方向上分配,从而达到出行成本最小的系统平衡。第二原理作为一个设计原理,是面向交通运输规划师和工程师的。一般来说,这两个原理下的平衡结果不会是一样的。在实际中,人们更希望交通流能够按照 Wardrop 第一原理,即用户平衡的近似解来分配。 换个角度来说,第一原理反映了道路用户选择路线的一种准则。按照第一原理分配出来的结果应该是路网上用户实际径路选择的结果。而第二原理则反映了一种目标,即按照什么样的方式分配是最好的。在实际网络中很难出现第二原理所描述的状态,除非所有人的司机互相协作为系统最优化而努力。但第二原理为交通管理员提供了一种决策方法。 (二)平衡和非平衡分配 举个例题来说明。 【例】设 OD 之间交通量为 q = 2000 q=2000 q=2000 辆,有两条径路 a , b a,b a,b。径路 a a a 行驶时间短,但通行能力小,径路 b b b 行驶时间长,但通行能力大。假设各自的行驶时间 (min) 与流量的关系为: t a = 10 + 0.02 q a t b = 15 + 0.005 q b t_a=10+0.02q_a\\ t_b=15+0.005q_b ta=10+0.02qatb=15+0.005qb 根据第一原理,达到平衡时,径路 a , b a,b a,b 具有相等的行驶时间,且在径路 a a a 的交通量 q a q_a qa 与在径路 b b b 交通量 q b q_b qb 之和为 2000,则有: { 10 + 0.02 q a = 15 + 0.005 q b q a + q b = 2000 \begin{cases} 10+0.02q_a=15+0.005q_b \\ q_a+q_b=2000\end{cases} {10+0.02qa=15+0.005qbqa+qb=2000 可解得 q a = 600 , q b = 1400 , t a = t b = 22 q_a=600,q_b=1400,t_a=t_b=22 qa=600,qb=1400,ta=tb=22。 这仅仅是一个 OD 对,且只有两条径路。实际情况下有多个 OD 对,更有多条径路,而且径路之间还有重复部分。用代数方法求解是不太现实的,因此需要研究其他方法。 1956 年,Beckmann 等提出了描述平衡交通流分配的一个数学规划模型。 20 年之后才由 LeBlanc 等学者设计出了求解 Beckmann 模型的算法(将 Frank-Wolfe 算法用于求解该模型),从而形成了现在的实用算法。 目前,在交通流分配理论中,以第一原理为基本指导思想的分配方法比较多。国际上通常将交通流分配方法分为平衡分配和非平衡分配两大类。对于完全满足 Wardrop 原理定义的平衡状态,则称为平衡分配方法;对于采用启发式方法或其他近似方法的分配模型,则称为非平衡分配方法。 三、非平衡分配方法非平衡分配方法按其分配方式可分为变化路阻和固定路阻两类,按分配形态可分为单径路和多径路两类,可组合为以下 4 种类型。 单径路+固定路阻=全有全无方法。单径路+变化路阻=容量限制方法。多径路+固定路阻=静态多径路方法。多径路+变化路阻=容量限制多径路方法。 3.1 全有全无分配方法全有全无方法 (All-or-Nothing Assignment Method,简称 0-1 分配法) 是最简单的分配方法,该方法不考虑路网的拥挤效果,取路阻为常数,即假设车辆的路段行驶速度、交叉口延误不受路段、交叉口交通负荷的影响。每一个 OD 点对的 OD 交通量被全部分配在最短径路上,其他径路上分配不到流量。 算法步骤为: 初始化,使路网所有路段的流量为 0,求出此时各路段的阻抗。计算路网中每个出发地 O 到每个目的地 D 的最短径路。将 O、D 间的 OD 交通量全部分配到相应的最短径路上。由于全有全无分配法不能反映拥挤效果,主要是用于某些非拥挤路网,该分配法用于没有通行能力限制的网络的情况。因此,建议使用范围是:在城际之间道路通行能力不受限制的地区可以采用;一般城市道路网的交通流分配不宜采用该方法。 3.2 增量分配法增量分配法 (Incremental Assignment Method,简称 IA 分配法) 是一种近似的平衡分配法。该方法是在全有全无分配法的基础上,考虑了路段交通流量对阻抗的影响,进而根据道路阻抗的变化来调整路网交通量的分配,是一种“变化路阻”的交通量分配方法。增量分配法有容量限制-增量分配法、容量限制-迭代平衡分配法两种形式。 1. 容量限制-增量分配法 采用容量限制-增量分配方式,首先需先将 OD 表分解成 N 个分表,然后分别使用 N 次最短路分配方法,每次分配一个 OD 分表,并且每分配一次,路阻就根据路阻函数修正一次,直到把 N 个 OD 分表全部分配到路网上。 增量分配法的复杂程度和结果的精确性都介于全有全无分配法和后述的平衡分配法之间;当分割数 N = 1 N=1 N=1 时便是全有全无分配方法,当 N N N 趋于无穷大时,该方法趋向于平衡分配的结果。该方法的优点是:简单可行,精确度可以根据分割数 N N N 的大小来调整。实践中经常被采用,且有比较成熟的商业软件可供使用。缺点是:与平衡分配方法相比,仍然是一种近似方法,当路阻函数不是很敏感时,会将过多的交通量分配到某些通行能力很小的路段上。 2. 容量限制-迭代平衡分配 容量限制-迭代平衡分配形式,不需要将 OD 表分解,先假设路网中各路段上的流量为零,按零流量计算初始路阻,并分配这个 OD 表,然后按分配流量计算路阻,重新分配整个 OD 表,最后比较新分配的路段流量与原来分配的路段流量、新计算的路阻与原来计算的路阻,若分别比较接近,满足迭代精度要求,则停止迭代,获得最后的分配的交通量。否则,根据新计算的路阻,再次分配,直到满足精度为止。 增量分配和迭代平衡分配形式的原理基本上是相同的,分配过程中最主要的是确定路阻和计算最短路阻矩阵。理论上讲,若迭代精度控制得合理,迭代平衡分配的结果优于增量分配的结果。但迭代平衡方法事先无法估计迭代次数及工作量,出现复杂的网络,可能出现算法不收敛的情况。 总而言之,无论是全有全无分配方法还是容量限制分配方法,在分配过程中,都认为出行者对路网有全面的掌握并能进行科学的预测,都能选中最短径路出行。可以说这只是一种理论分析和假设,实际中,由于路网结构复杂、出行径路众多,因此在出行径路上有很大的随机性,即出行者不一定都选择了最短径路出行,而是在其认为合理的备选路径集合中进行随机选择。所以说,研究随机分配方法才是更符合实际需要的科学的方法。 3.3 迭代加权法迭代加权法 (Method of Successive Average,简称 MSA 法) 是介于增量分配法和平衡分配法之间的一种循环分配方法。 不断调整各路段分配的流量而逐渐接近平衡分配结果。每步循环中,根据各路段分配到的流量进行一次全有全无分配,得到一组各路段的附加流量;然后用该循环中各路段已分配的交通量和该循环中得到的附加交通量进行加权平均,得到下一循环中的分配交通量;当相邻两次循环中分配的交通量十分接近时,即停止运算,最后一次循环中得到的交通量即为最终结果。 MSA 是既简单适用,又最接近平衡分配法的一种分配方法;如果每次循环中权重系数的取值严格按照数学规划模型取值的话,即可得到平衡分配的解。 四、平衡分配方法 4.1 用户平衡分配模型及其求解算法1952 年 Wardrop 提出用户平衡分配原理后,曾经在很长一段时间内没有一种严格的模型可以求出满足这种平衡准则的交通流分配方法,这也自然成了交通流分配研究的重要课题。1956 年 Beckmann 等学者提出了一种满足 Wardrop 准则的数学规划模型,正是这一数学规划模型奠定了交通流分配问题的理论基础。 模型中所使用的符号和定义如下表所示。
最后,径路流量应满足非负约束。 目标函数表达形式为: min Z ( X ) = ∑ a ∫ 0 x a t a ( w ) d w \min Z(X)=\sum_a\int_0^{x_a}t_a(w)dw minZ(X)=a∑∫0xata(w)dw Beckmann 在 1956 年提出的上述数学规划模型沉睡了 20 年以后,即直到 1975 年才由 LbBlanc 等学者将 Frank-Wolfe 算法用于求解 Beckmann 模型,最终形成了目前广泛应用的一种解法,通常称为 F-W 解法。 Beckmann 模型是一个非线性规划模型,而对非线性规划模型即使现在也没有普遍通用的解法,只是对某些特殊的模型才有可靠的解法,Beckmann 模型就是一种特殊的非线性规划模型。 平衡分配法和前面介绍的非平衡分配法中的迭代加权法十分相似,唯一的区别就是平衡分配法通过严格的数学运算求得迭代步长,因而就能保证求出平衡解;而 MSA 法迭代步长为 1 / n 1/n 1/n,因而能求出近似平衡解,也能收敛到精确平衡解。 4.2 系统最优分配模型及其求解算法(一)系统最优分配模型 上一节中介绍的 Beckmann 模型和解法都是建立在 Wardrop 第一原理即用户平衡原理的基础上,因此称为用户最优 (UE) 。Wardrop 还同时提出了第二原理,即系统最优分配问题。系统最优分配 (System Optimum Assignment) 的定义是:在拥挤的网络中,交通量应该按照使得路网中总阻抗即总行驶时间最小的原则进行分配。 从一定意义上来讲,第一原理更能真实地反映交通网络中用户的实际选择出行径路的行为,基于第一原理的 Beckmann 模型和其 F-W 算法得出的结果也更能符合交通网络的实际分配结果;而第二原理反映的则是交通系统管理者的主观愿望,一般情况下它与交通网络的实际分配情况存在差异,但是它可以作为对系统评价的指标,为管理者提供一种决策依据。从此种意义上说,第二原理是道路系统管理者所希望的分配原则,尤其在智能交通系统获得广泛应用之后。 系统最优原理比较容易用数学模型来表达,其目标函数是网络中所有用户的总的阻抗最小,约束条件和用户平衡分配模型一样。 对阻抗函数进行某种变换,可以按照用户最优模型的算法来求解系统最优模型。 五、随机分配方法 5.1 用户平衡和随机用户平衡可以说网络平衡问题实质上就是一个分配问题,在分配过程中逐步达到平衡。 显然,道路利用者(车辆驾驶员)总是力图选择从起点到终点之间阻抗最小的径路,但并不意味着所有利用者都会选择同一径路。因为路段阻抗最交通量变化而变化,结果径路阻抗也因交通量分布不同而变化。只有当不存在司机能单方面改变其径路来降低其行驶时间时,一个稳定状态才算达到了,这就是所谓的“用户平衡 (User Equilibrium)”即 UE 问题。它是一个确定性交通流分配问题,即认为道路利用者能够精确计算每条径路的真实阻抗并做出完全正确的择路决策。 实际中,道路利用者对路段阻抗只能是一种对真正阻抗的估计,这种估计值与实际值之间的差别是一个随机变量,相应地就有随机用户平衡问题,即任何一个道路利用者均不可能通过单方面改变其径路来降低其所估计的行驶时间时,一个稳定平衡状态才算达到了,这就是所说的“随机用户平衡 (Stochastic User Equilibrium)”即 SUE 问题。它是一个随机性交通流分配问题,分配中径路选择仍然遵循 Wardrop 第一原理,差别在于道路利用者选择的是自己估计阻抗最小的径路而已,所以同一个 OD 对之间有多条径路被选择。当道路利用者对路段阻抗的理解完全正确时,SUE 就成为 UE。随机分配方法就是在研究径路估计阻抗分布函数的基础上,计算有多少道路利用者选择每一条径路。 5.2 非平衡随机分配方法非平衡随机分配方法在各类文献中介绍得较多,但是只有两类方法得到了相对广泛的应用,即模拟随机分配法 (Stimulation-based) 和概率随机分配法 (Proportion-based) 。前者应用蒙特卡洛等随机模拟方法产生路段阻抗的估计值,然后进行全有全无分配;后者是利用 Logit 等模型计算不同径路上承担的出行量比例,并由此进行分配。 模拟分配方法用随机数来拟合阻抗的估计,在理论上是一个有益的探讨,但是要实际应用则存在着不可避免的缺陷:1)估计路段阻抗分布相互独立的假设是不符合实际的;2)没有很好地考虑拥挤因素。 阻抗为常数的多径路分配方法有两种:Logit 方法和 Probit 方法。 用 Logit 模型求径路选择概率需要把点对 ( r , s ) (r,s) (r,s) 之间所有的径路都找出来,这在实际中是非常困难的。1971 年 Dial 发明了一个算法,该算法能够在网络上有效地实现 Logit 模型,但它并不需要求解连接 OD 点对的所有径路的选择概率和交通量,因为在实际网络中,有些径路是明显不会被用户考虑的。具体来说,Dial 算法具有下列的特点: 认为道路利用者不是在出发点就决定选择哪条径路,而是在出行过程中的每一个节点都做一次关于下一步选择走哪条路的选择,即真正选择的不是径路,而是路段。道路利用者在一个节点处选择路段时,并不是以该节点为起点的每个路段都考虑,只有那些“有效路段”才可能被选择到。其中有效路段的定义是:当路段 ( i , j ) (i,j) (i,j) 的上游端点 i i i 比下游端点 j j j 离起点 r r r 近,而且 i i i 比 j j j 离终点 s s s 远,则该路段为有效路段。基于 Probit 模型的概率加载法能够克服 Logit 方法的缺陷,但该模型更复杂些,计算工作量大些。 阻抗变化的多径路分配方法也可以分为增量加载法和迭代加权两种方法。 总结非平衡随机分配方法可以发现,在这类方法中虽然能够进行随机分配,可是一个基本假设是感知路段阻抗被假设成是一个服从某已知参数分布的随机变量,期望值和方差是给定的。 在交通流分配的实践中,出行者对阻抗的估计不仅是随机变量,而且阻抗与交通量是相关的,是交通量的函数。所以,更有意义的事这种情况下的随机分配的研究,也就是平衡随机分配方法的研究。 5.3 随机平衡分配方法该方法实质就是研究拥挤因素下的随机用户平衡 (SUE) 分配问题,即路段阻抗是随交通量变化的,假设感知路段阻抗的期望值是路段交通量的函数。 随机用户平衡分配中道路利用者的径路选择行为仍遵循 Wardrop 第一原理,只不过用户选择的是自己估计阻抗最小的径路来出行。也就是用户选择 OD 对间某条径路的可能就是其感知阻抗在该 OD 对间所有径路的感知阻抗中为最小的概率。 在随机用户平衡状态下,一个 OD 对间所有已被选用的径路上,并不一定具有相同的实际阻抗。某条被选用径路上的分配交通量等于 OD 对间交通量与该条径路的选择概率的乘积。 对于 SUE 问题,可以采用 F-W 算法的思想求解。 六、动态交通流分配 6.1 动态交通流的解析交通流分配 (Traffic Assignment) 是交通规划中的一个重要步骤。在交通流分配中 OD 矩阵是已知且确定的,不考虑其随时间而变化,因此称之为静态交通流分配。20 世纪 50 年代到 80 年代,静态交通流分配被广大学者进行了深入研究,取得了许多进展。 在交通规划方法相对成熟之后,交通工程领域的人们逐渐把注意力更多地转向交通控制与诱导,例如智能交通系统 (ITS) 的快速发展。交通规划的时间概念是以年度计的,可以将 OD 矩阵看成不变的,而交通控制与诱导的时间概念以分甚至秒计,这时 OD 矩阵的数据必须考虑成变量。因此,如果想把交通流分配扩展到交通控制与诱导之中,静态交通流分配的思想和方法显然是不适用的。 所谓动态交通流分配,就是将时变的交通出行合理分配到不同的路径上,以降低个人的出行费用或系统总费用。它是在交通供给状况以及交通需求状况均为已知的条件下,分析其最优的交通流量分布模式,从而为交通流控制与管理、动态路径诱导等提供依据。 通过交通流管理和动态路径诱导在空间和时间尺度上对人们已经产生的交通需求的合理配置,使交通路网优质高效地运行。交通供给状况包括路网拓扑结构、路段特性等,交通需求状况则是指在每时每刻产生的出行需求及其分布。 动态交通流分配在交通诱导与控制中的地位和作用如下图所示。
智能交通系统 (ITS) 的发展需要动态交通流分配技术的支持,ITS 中的先进的出行者信息系统 (ATIS)、车辆线路诱导系统 (VRGS) 等核心部分都需要动态交通流分配作为理论基础。可以说,ITS 的研究和实施,对动态交通流分配理论提出了更迫切的需求,极大地推进了动态交通流分配理论前进的步伐。 深入剖析平衡分配方法和非平衡分配方法的分配思想和算法设计,我们会发现都有一个共同的现象,那就是当我们按照某种分配规则(确定性或随机性路径选择)将一定量 OD 分配到某一条径路上之后,就认为这些 OD 量同时存在于该路径的所有路段上了。这显然有些问题,车辆加载到路段上后是随着时间逐渐向前推移的。也就是说这种分配思想没有考虑时间因素和交通需求的时变特性,采取的是静态的思想。 静态交通流分配(如容量限制、多路径随机分配等)中,之所以说是静态的,最根本的一点,就是表现为当流量被加载到网络的某条路径上之后,则一瞬间就同时存在于该路径的所有路段上了,而不是由第一个路段一步步随时间推进到终点的。 静态的第二点就是静在流量加载到路径上之后被处理成原有路段上“原地踏步”。当下一个流量加载上后,与前一个流量在所有路段上简单相加。而实际上,当第二流量加载之后,第一个流量随时间的推移可能已经运动到别的路段了。 对动态交通流分配的“动”阐述如下: 动在交通流是随着时间的推移,在所选的路径上沿着各个路段逐渐向终点移动运动的,既不是瞬间布满各路段,也不是在各路段上“原地踏步”不动。动在路段上的阻抗是真动而不是“伪动”。静态分配中,它们某时刻用来计算阻抗的流量可能不是真正存在于该路段上的流量,这时某路段上的流量只是那些经过该路段的“原地踏步”的流量的算术相加,结果可能夸大或缩小了路段的路阻。动在交通需求是时变的。这一点实际是第一点的引申,因为流量随时间的推移,路段上的流量随时间形成高峰、平峰等分布形态,动态交通需求的时变性最终反映为路段上的交通量是时变的,路段上的阻抗又是时变的。 6.1 动态交通流分配的基本概念(一)动态用户最优和动态系统最优 一般的解释是:动态用户最优 (DUO) 就是指路网中任意时刻】任何 OD 对之间被使用的路径上的当前瞬态行驶费用相等,且等于最小费用的状态。显然,根据该定义,这不一定要求同一时刻从同一节点进入网络的车辆到达终点时花费相等的时间(这是静态分配的思想),它只是要求在同一个节点—终点对之间正在被使用的所有路径上瞬时的行驶费用相等。 动态系统最优 (DSO) 就是指在所研究得时段内,出行者各瞬间通过所选择的出行路径,相互配合,使得系统的总费用最小。 (二)路段流出函数模型 路段流出函数是动态交通流分配理论中的关键和特殊之处。在静态交通流分配中没有出现路段流出函数的概念,因为静态分配中认为沿一条路径上分配的交通量同时存在于该路径的所有路段上,也就没有流出的提法。而在动态交通流分配中流出函数是反映交通拥挤,抓住网络动态本质特性的关键。 在动态分配中,出行者路径选择原则确定后,其路段流入率自然确定,而对于流出函数,根据目前各种文献的研究,人们提出了多种模型。无论哪种模型,基本的原则是路段流出函数的建立应该确保车辆按照所给出的路段走行时间走完该路段。 (三)路段阻抗特性模型 在静态交通流分配中,路段阻抗特性函数通过交通量和走行时间或费用的关系来反映,它是描述交通流平衡的基础内容之一,静态平衡分配要求阻抗函数为单调递增的函数。由于静态交通流分配以交通规划设计为主要研究目标,其重点不是描述交通拥挤,所以对阻抗的估计精度要求相对来说并不过高。但是在动态分配情形下,提高阻抗函数的预测精度则是一个基本要求。 在建立阻抗特性模型时,要注意到动态交通流分配中采用的状态变量不是静态交通流分配中的流量,而是某时刻路段上的交通负荷,即这一时刻路段上存在的车辆数。因为在动态情形下,用交通量无法描述路段的动态交通特征,交通量是单位时间内通过某道路断面的车辆数,是一个时间观测量,其值是在某一点观测到的,适用于静态描述;而交通负荷是指某一时刻一个路段上存在的车辆数,它是一个空间观测量,适用于动态描述。 |

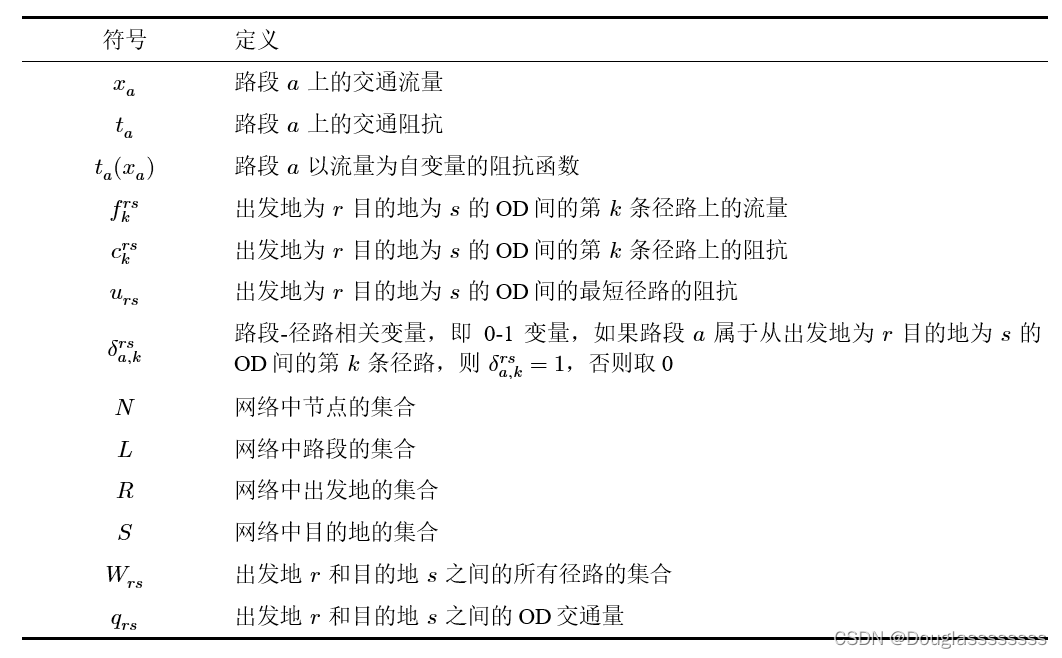 首先,平衡分配过程中应该满足交通流守恒的条件,即 OD 间各径路上的交通量之和应等于 OD 交通总量。即有
∑
k
∈
W
r
s
f
k
r
s
=
q
r
s
,
∀
r
,
s
\sum_{k\in W_{rs}}f_k^{rs}=q_{rs},\forall r,s
k∈Wrs∑fkrs=qrs,∀r,s 其次,路段上的流量应该是由各个
(
r
,
s
)
(r,s)
(r,s) 对的途经该路段的径路的流量累加而成。同时,径路的阻抗应该是该径路途经各个路段阻抗的累加。
首先,平衡分配过程中应该满足交通流守恒的条件,即 OD 间各径路上的交通量之和应等于 OD 交通总量。即有
∑
k
∈
W
r
s
f
k
r
s
=
q
r
s
,
∀
r
,
s
\sum_{k\in W_{rs}}f_k^{rs}=q_{rs},\forall r,s
k∈Wrs∑fkrs=qrs,∀r,s 其次,路段上的流量应该是由各个
(
r
,
s
)
(r,s)
(r,s) 对的途经该路段的径路的流量累加而成。同时,径路的阻抗应该是该径路途经各个路段阻抗的累加。 如果对静态交通流分配和动态交通流分配做一个概括的话,可以说:静态交通流分配是以 OD 交通量为对象、以交通规划为目的而开发出来的交通需求预测模型;而动态交通流分配则是以路网交通流为对象,以交通控制与诱导为目的开发出来的交通需求预测模型。
如果对静态交通流分配和动态交通流分配做一个概括的话,可以说:静态交通流分配是以 OD 交通量为对象、以交通规划为目的而开发出来的交通需求预测模型;而动态交通流分配则是以路网交通流为对象,以交通控制与诱导为目的开发出来的交通需求预测模型。【本文地址】
今日新闻 |
推荐新闻 |