三维坐标旋转矩阵 |
您所在的位置:网站首页 › 二维变换中绕原点的旋转相当于三维变换中绕 › 三维坐标旋转矩阵 |
三维坐标旋转矩阵
|
1.三维坐标旋转矩阵的推导过程 任何维的旋转可以表述为向量与合适尺寸的方阵的乘积。最终一个旋转等价于在另一个不同坐标系下对点位置的重新表述。 坐标系旋转角度θ则等同于将目标点围绕坐标原点反方向旋转同样的角度θ。 若以坐标系的三个坐标轴X、Y、Z分别作为旋转轴,则点实际上只在垂直坐标轴的平面上作二维旋转。 假设三维坐标系(右手坐标系,拇指即指向X轴的正方向。伸出食指和中指,如右图所示,食指指向Y轴的正方向,中指所指示的方向即是Z轴的正方向。要确定轴的正旋转方向,用右手的大拇指指向轴的正方向,弯曲手指。那么手指所指示的方向即是轴的正旋转方向)中的某一向量
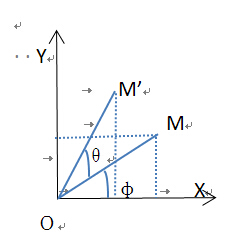
一、绕Z轴逆时针旋转θ角 绕Z轴旋转,相当于在XY平面的投影OM绕原点逆时针旋转,如下图所示,OM旋转θ角到OM’。
设旋转前的坐标为 对于和进行三角展开可得:
且有
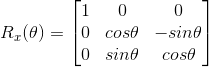
由此可得: 二. 绕X轴逆时针旋转θ角
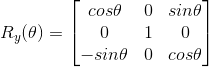
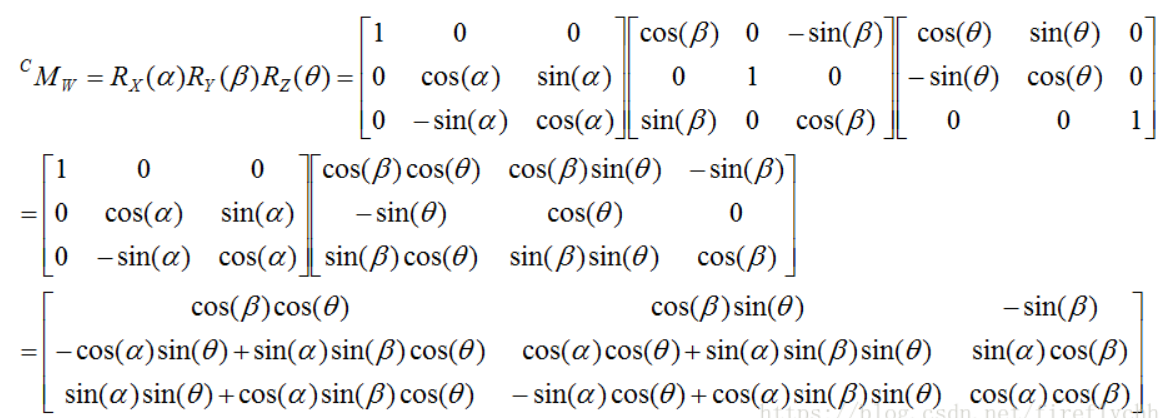
三. 绕Y轴逆时针旋转θ角 以上旋转矩阵都是在右手坐标系下计算的。三维旋转矩阵就可由以上三个矩阵相乘得到。 这里的旋转矩阵是需要左乘的,而且以逆时针为正。R是一个旋转矩阵,X是一个三维列向量[x,y,z]’。 RX就是把X旋转。
———————————————— 版权声明:本文为CSDN博主「坚持奋斗的李洛克」的原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接及本声明。原文链接:https://blog.csdn.net/lz20120808/java/article/details/50809397 |
 ,其在直角坐标系中的图如图1所示。其中点P在XY平面、XZ平面、YZ平面的投影分别为点M、点Q、点N。
,其在直角坐标系中的图如图1所示。其中点P在XY平面、XZ平面、YZ平面的投影分别为点M、点Q、点N。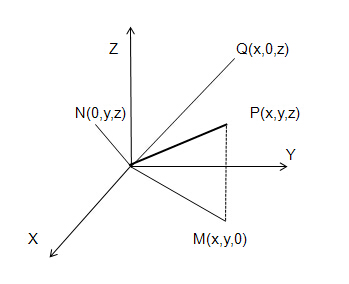
 ,旋转后的坐标为
,旋转后的坐标为 ,则点M的坐标为(x,y),点M’的坐标为
,则点M的坐标为(x,y),点M’的坐标为 。由此可得:
。由此可得: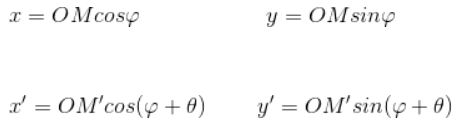


 ;可得绕Z轴旋转角的旋转矩阵为:
;可得绕Z轴旋转角的旋转矩阵为: 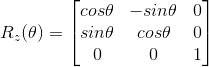

【本文地址】
今日新闻 |
推荐新闻 |